
നിങ്ങളുടെ പ്രോജക്റ്റിൽ രൂപകൽപ്പന ചെയ്യുക, വികസിപ്പിക്കുക, ആവർത്തിക്കുക - പൈത്തൺ
നിങ്ങളുടെ പ്രോജക്റ്റ് രൂപകൽപ്പന ചെയ്യുമ്പോൾ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ ഇനിപ്പറയുന്ന ചോദ്യങ്ങൾക്ക് ഉത്തരം നൽകുക.
- ഈ പ്രോജക്റ്റിൽ റോബോട്ടിനെക്കൊണ്ട് എന്ത് ചെയ്യിക്കണമെന്നാണ് നിങ്ങൾ ആഗ്രഹിക്കുന്നത്? വിശദാംശങ്ങൾ സഹിതം വിശദീകരിക്കുക.
- പ്രോജക്റ്റ് പരീക്ഷിക്കുന്നതിന് നിങ്ങൾ എന്തെല്ലാം ഘട്ടങ്ങളാണ് പിന്തുടരുക? വിശദാംശങ്ങൾ സഹിതം വിശദീകരിക്കുക.
- ഏറ്റവും കൃത്യതയോടെ ജോലി പൂർത്തിയാക്കാൻ നിങ്ങളുടെ റോബോട്ടിനെ എങ്ങനെ പ്രോഗ്രാം ചെയ്യാൻ കഴിയും? വിശദാംശങ്ങൾ സഹിതം വിശദീകരിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഉത്തരങ്ങൾ
ടീച്ചർ ടൂൾബോക്സ്
-
ഉത്തരങ്ങൾ
-
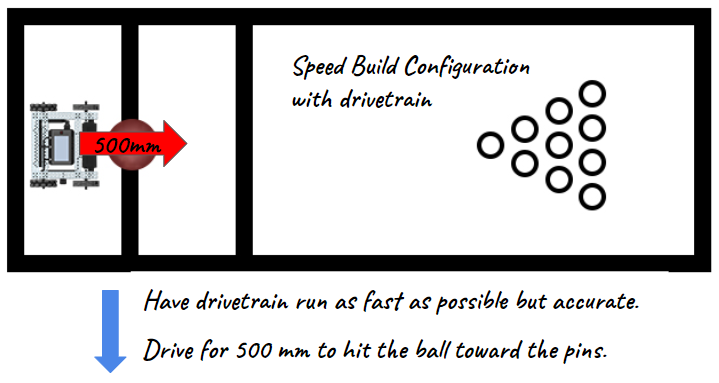
കൃത്യത നിലനിർത്തിക്കൊണ്ട് പന്ത് ഒപ്റ്റിമൽ ശക്തിയോടെ മുന്നോട്ട് തള്ളാൻ കഴിയുന്നത്ര വേഗത്തിലും ദൂരത്തിലും വാഹനമോടിക്കുക എന്നതാണ് ഉത്തരങ്ങൾ. റോബോട്ടും പന്തും കൂട്ടിയിടിക്കുന്നതും പിന്നുകളും ഉപയോഗിച്ച് പന്ത് കൂട്ടിയിടിക്കുന്നതും അവരുടെ പദ്ധതികളിൽ എങ്ങനെ ഉൾപ്പെട്ടുവെന്ന് വിശദീകരിക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുക. ഇത് ന്യൂട്ടന്റെ രണ്ടാം നിയമവുമായി ബന്ധിപ്പിച്ചാൽ, വിദ്യാർത്ഥികൾ റോബോട്ടിനെ 100% വേഗതയിൽ ഓടിക്കാൻ സജ്ജമാക്കാൻ ആഗ്രഹിക്കും. എന്നാൽ റോബോട്ടിന്റെ ഏറ്റവും ഉയർന്ന വേഗത പന്തിന്റെ ഏറ്റവും വലിയ ത്വരണത്തിലേക്കും തുടർന്ന് കൂട്ടിയിടിക്കലിനു ശേഷമുള്ള പിന്നുകളിലേക്കും നയിക്കുമെങ്കിലും, റോബോട്ടിന്റെ ഏറ്റവും ഉയർന്ന വേഗത ഈ വെല്ലുവിളിയിൽ കൃത്യതയെ അപകടത്തിലാക്കുമെന്ന് എടുത്തുകാണിക്കുക. അവർ രണ്ടും തമ്മിൽ ഒരു വിട്ടുവീഴ്ച കണ്ടെത്തേണ്ടതുണ്ട്, താഴെയുള്ള പുതിയ പട്ടികയോ മുൻ പട്ടികകളോ ഉപയോഗിച്ച് ഡാറ്റ ശേഖരിക്കാനും ഈ വെല്ലുവിളിക്ക് ഏറ്റവും മികച്ച വേഗത തീരുമാനിക്കാനും അവർക്ക് കഴിയും.
-
സ്യൂഡോകോഡ് എഴുതുക, റോബോട്ട് സഞ്ചരിക്കേണ്ട ദൂരം അളക്കുക, ആ അളവ് മില്ലിമീറ്ററാക്കി മാറ്റുക, പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക എന്നിവ ഉത്തരങ്ങളിൽ ഉൾപ്പെടണം. പ്രോഗ്രാമിംഗിനായി സെന്റീമീറ്ററുകളോ മീറ്ററുകളോ മില്ലിമീറ്ററാക്കി മാറ്റുന്നത് എങ്ങനെയെന്ന് വിദ്യാർത്ഥികൾക്ക് മനസ്സിലായെന്ന് ഉറപ്പാക്കുക.
-
സെന്റിമീറ്ററുകളെ മില്ലിമീറ്ററാക്കി മാറ്റാൻ പൂർണ്ണസംഖ്യയുടെ അവസാനം ഒരു പൂജ്യം ചേർക്കേണ്ടതുണ്ട്. ഉദാഹരണത്തിന്, 10cm എന്നത് 100mm ആണ്.
-
മീറ്ററുകളെ മില്ലിമീറ്ററാക്കി മാറ്റാൻ പൂർണ്ണസംഖ്യയുടെ അവസാനം മൂന്ന് പൂജ്യങ്ങൾ ചേർക്കേണ്ടതുണ്ട്. ഉദാഹരണത്തിന്, 1 മീറ്റർ 1000 മില്ലിമീറ്ററിന് തുല്യമാണ്.
-
-
റോബോട്ടിന്റെ സ്റ്റാർട്ട് ലൊക്കേഷനും പന്തിന്റെ സ്റ്റാർട്ട് പൊസിഷനും തമ്മിലുള്ള കൃത്യമായ ദൂരം അളക്കുന്നതും ആ അളവ് ഉപയോഗിച്ച് റോബോട്ടിന് സഞ്ചരിക്കേണ്ട കൃത്യമായ ദൂരം പ്രോഗ്രാം ചെയ്യുന്നതും ഉത്തരങ്ങളിൽ ഉൾപ്പെട്ടേക്കാം. കൂടാതെ, കൃത്യത നിലനിർത്തിക്കൊണ്ട് ഡ്രൈവിംഗിന് അനുയോജ്യമായ വേഗത കണ്ടെത്തേണ്ടത് പ്രധാനമാണ്.
നിങ്ങളുടെ പ്രോജക്റ്റ് സൃഷ്ടിക്കുമ്പോൾ താഴെയുള്ള ഘട്ടങ്ങൾ പാലിക്കുക:
- ഡ്രോയിംഗുകളും സ്യൂഡോകോഡും ഉപയോഗിച്ച് നിങ്ങളുടെ റോബോട്ട് പിന്തുടരേണ്ട പാത ആസൂത്രണം ചെയ്യുക (Google / .docx / .pdf).
- നിങ്ങളുടെ പ്രോജക്റ്റ് വികസിപ്പിക്കുന്നതിന് നിങ്ങൾ സൃഷ്ടിച്ച സ്യൂഡോകോഡ് ഉപയോഗിക്കുക.
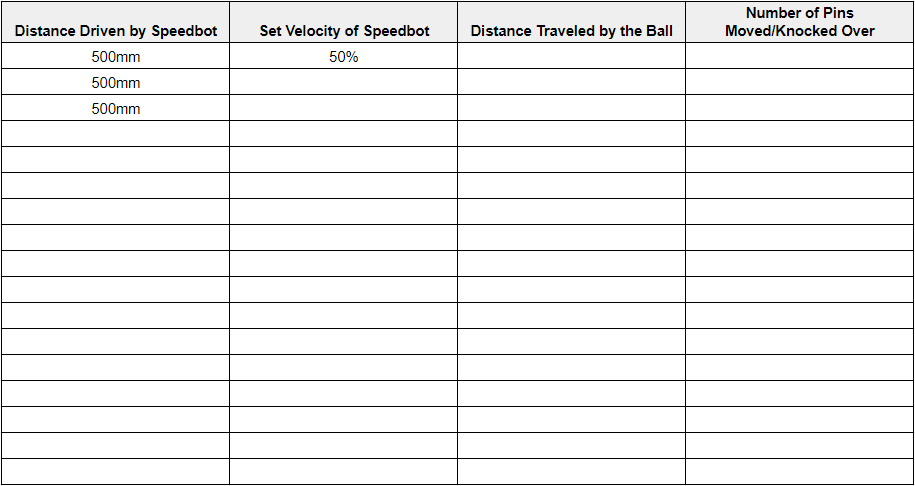
- നിങ്ങളുടെ പ്രോജക്റ്റ് പൈത്തൺൽ ഇടയ്ക്കിടെ പരീക്ഷിച്ച്, നിങ്ങളുടെ ടെസ്റ്റിംഗിൽ നിന്ന് നിങ്ങൾ പഠിച്ച കാര്യങ്ങൾ ഉപയോഗിച്ച് അതിൽ ആവർത്തിക്കുക. ഓരോ പരീക്ഷണത്തിനു ശേഷവും, റോബോട്ട് എത്ര ദൂരം ഓടിച്ചു, വേഗത എത്രയാക്കി, പന്ത് എത്ര ദൂരം സഞ്ചരിച്ചു, എത്ര പിന്നുകൾ നീക്കി എന്നിവ രേഖപ്പെടുത്തുക. ഡാറ്റ ശേഖരണത്തിനും വിശകലനത്തിനുമായി പുതുക്കിയ ഒരു പട്ടിക ഇതാ.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
- സ്ട്രൈക്ക് ചലഞ്ചിനുള്ള പട്ടിക ഇവിടെ നിന്ന് ഡൗൺലോഡ് ചെയ്ത് പ്രിന്റ് ചെയ്യാം (Google / .pdf), അല്ലെങ്കിൽ വിദ്യാർത്ഥികൾക്ക് അവരുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകളിൽ പട്ടിക പുനഃസൃഷ്ടിക്കാം.
-
വിദ്യാർത്ഥികളോട് അവരുടെ നിർദ്ദിഷ്ട പാത അളക്കാൻ ഒരു റൂളർ ഉപയോഗിക്കാൻ ആവശ്യപ്പെടുക. പിന്നെ, രണ്ടാം ഘട്ടത്തിലേക്ക് കടക്കുന്നതിന് മുമ്പ് വിദ്യാർത്ഥികളെ അവരുടെ സ്യൂഡോകോഡ് വിലയിരുത്താൻ അനുവദിക്കുക.
-
ഓർഗനൈസേഷൻ, ഫ്ലോ, ട്രബിൾഷൂട്ടിംഗ് എന്നിവയെ സഹായിക്കുന്നതിന് അവരുടെ പ്രോജക്റ്റിൽ സ്യൂഡോകോഡ് കമന്റുകളായി ഉപയോഗിക്കാൻ വിദ്യാർത്ഥികളെ നിർദ്ദേശിക്കുക. പ്രോജക്റ്റുകളിൽ നിർദ്ദേശങ്ങൾ ചേർക്കുന്നതിന് മുമ്പ് വിദ്യാർത്ഥികളോട് അവരുടെ സ്യൂഡോകോഡ് വിലയിരുത്താൻ ആവശ്യപ്പെടുക. നിങ്ങൾക്ക് ഇവിടെ നിന്ന് ഒരു സ്യൂഡോകോഡ് റൂബ്രിക് ഡൗൺലോഡ് ചെയ്യാം (Google / .docx / .pdf). വെല്ലുവിളി പൂർത്തിയാക്കാൻ വിദ്യാർത്ഥികളെ സഹായിക്കുമ്പോൾ റഫറൻസിനായി താഴെയുള്ള സാമ്പിൾ കോഡ് കാണുക:
# ലൈബ്രറി വെക്സ് ഇംപോർട്ടിൽ നിന്ന് ഇംപോർട്ടുചെയ്യുന്നു * # പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക # പന്ത് കൂടുതൽ ദൂരം തള്ളുന്നതിന് ഡ്രൈവ് വേഗത 50 ശതമാനത്തിൽ കൂടുതലായി സജ്ജമാക്കുക ഡ്രൈവ്ട്രെയിൻ.set_drive_velocity(65, PERCENT) # പന്തുമായി കൂട്ടിയിടിക്കാൻ 500mm മുന്നോട്ട് ഓടിക്കുക ഡ്രൈവ്ട്രെയിൻ.drive_for(FORWARD, 500, MM) - പരീക്ഷണ ഘട്ടം തുടരുമ്പോൾ, വിദ്യാർത്ഥികളുടെ ഡാറ്റ പട്ടികകൾ അവലോകനം ചെയ്ത്, വെല്ലുവിളിക്ക് ഏറ്റവും മികച്ച വേഗത എങ്ങനെ തിരഞ്ഞെടുത്തുവെന്ന് വിശദീകരിക്കാൻ ഗ്രൂപ്പുകളോട് ആവശ്യപ്പെടുക. അവർ ശ്രദ്ധ കേന്ദ്രീകരിക്കേണ്ട രണ്ട് പ്രധാന വേരിയബിളുകൾ റോബോട്ടിന്റെ വേഗതയും ചലിപ്പിച്ച പിന്നുകളുടെ എണ്ണവുമാണ്, പക്ഷേ പന്ത് സഞ്ചരിച്ച ഏകദേശ ദൂരവും പരിഗണിക്കാവുന്നതാണ്. വീണ്ടും, ഒരു സമയം ഒരു വേരിയബിളിനെ മാത്രം കൈകാര്യം ചെയ്യുന്ന പരീക്ഷണത്തെ പ്രോത്സാഹിപ്പിക്കുക: റോബോട്ടിന്റെ പ്രവേഗം.