
プロジェクトを設計するときに、エンジニアリング ノートブックで次の質問に答えます。
- プロジェクトでロボットに何をさせたいですか? 詳細に説明してください。
- プロジェクトをテストするにはどのような手順に従いますか? 詳細に説明してください。
- 最も正確にタスクを完了するようにロボットをプログラムするにはどうすればよいでしょうか? 詳細に説明してください。
![]() 教師ツールボックス
-
回答
教師ツールボックス
-
回答
-
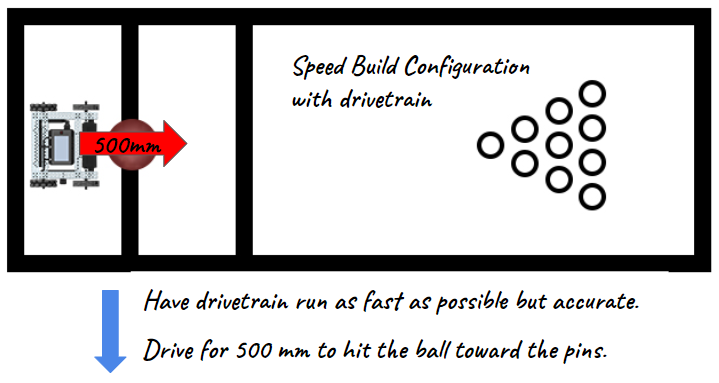
答えとしては、正確さを維持しながら最適な力でボールに届き、ボールを前方に押し出すのに十分な速さと距離をドライブすることが含まれると思われます。 ロボットとボールの衝突、およびボールとピンの衝突が計画にどのように影響したかを生徒に説明してもらいます。 これをニュートンの第二法則に結び付けると、生徒はロボットを 100% の速度で走行するように設定したいと思うでしょう。 しかし、ロボットの最高速度はボールとそれに続く衝突後のピンの加速を最大化しますが、ロボットの最高速度はこのチャレンジにおける精度を危険にさらす可能性があることを強調します。 彼らは 2 つの間の妥協点を見つける必要があり、以下の新しい表または以前の表を使用してデータを収集し、この課題に最適な速度を決定することができます。
-
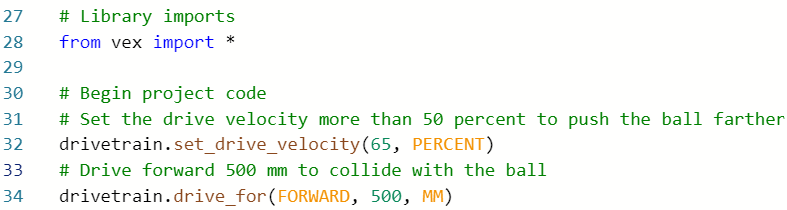
回答には、疑似コードの記述、ロボットが移動する必要がある距離の測定、その測定値のミリメートルへの変換、プロジェクトの実行が含まれます。 プログラミングのために、センチメートルまたはメートルをミリメートルに変換する方法を生徒が理解していることを確認します。
-
センチメートルをミリメートルに変換するには、整数の末尾にゼロを追加する必要があります。 たとえば、10cm は 100mm に相当します。
-
メートルをミリメートルに変換するには、整数の末尾に 3 つのゼロを追加する必要があります。 たとえば、1mは1000mmに相当します。
-
-
答えとしては、ロボットの開始位置からボールの開始位置までの正確な距離を測定し、その測定値を使用してロボットが移動する必要がある正確な距離をプログラムすることなどが考えられます。 また、正確性を保ちながら運転に最適な速度を見つけることも重要です。
プロジェクトを作成するときは、以下の手順に従ってください。
-
図面と疑似コード (Google .pdf) を使用して ロボットがたどる経路をプログラムして計画します。
-
作成した疑似コードを使用してプロジェクトを開発します。
-
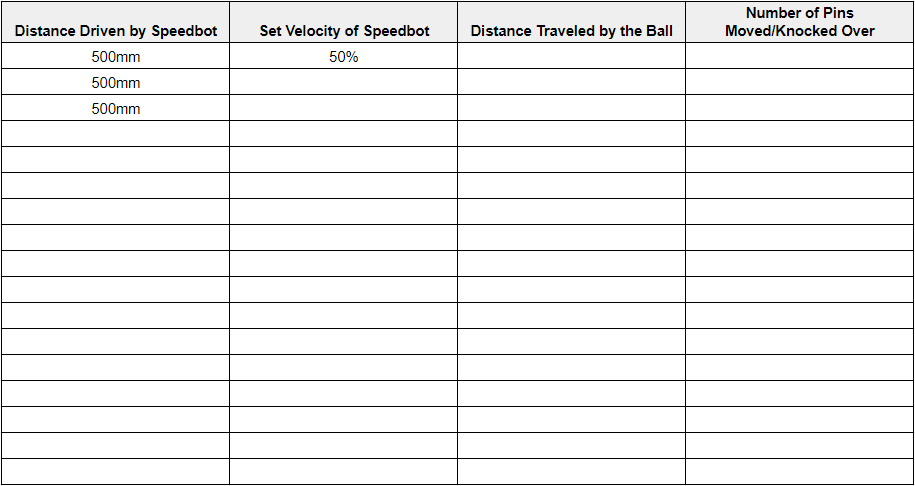
プロジェクト in Python を頻繁にテストし、テストから学んだことを活用して繰り返し実行します。 各試行の後に、ロボットが移動した距離、速度の設定、ボールの移動距離、移動したピンの数を記録します。 データ収集と分析のための更新された表を以下に示します。
![]() 教師のヒント
教師のヒント
-
ストライク チャレンジの表は、ここからダウンロードして印刷できます (Google )。また、学生はエンジニアリング ノートに表を再作成することもできます。
-
生徒たちに定規を使って提案した経路を測ってもらいます。 次に、2 番目のステップに進む前に、生徒に擬似コードを評価してもらいます。
-
整理、フロー、トラブルシューティングに役立つように、プロジェクト内のコメントとして疑似コードを使用するように学生に指導します。 プロジェクトに指示を追加する前に、生徒に疑似コードを評価するように依頼します。 疑似コード ルーブリックはこちらからダウンロードできます (Google )。
-
テスト段階が進むにつれて、生徒のデータ テーブルを確認し、課題に最適な速度を選択した方法をグループに説明してもらいます。 注目すべき 2 つの主な変数は、ロボットの速度と移動したピンの数ですが、ボールのおおよその移動距離も考慮される可能性があります。 ここでも、一度に 1 つの変数 (ロボットの速度) のみを操作するテストを推奨します。