
Podczas projektowania projektu odpowiedz na poniższe pytania w swoim notatniku inżynierskim.
- Co chcesz, aby robot robił w ramach projektu? Wyjaśnij ze szczegółami.
- Jakie kroki wykonasz, aby przetestować projekt? Wyjaśnij ze szczegółami.
- Jak zaprogramować robota, aby wykonał zadanie z największą dokładnością? Wyjaśnij ze szczegółami.
![]() Zestaw narzędzi dla nauczycieli
-
Odpowiedzi
Zestaw narzędzi dla nauczycieli
-
Odpowiedzi
-
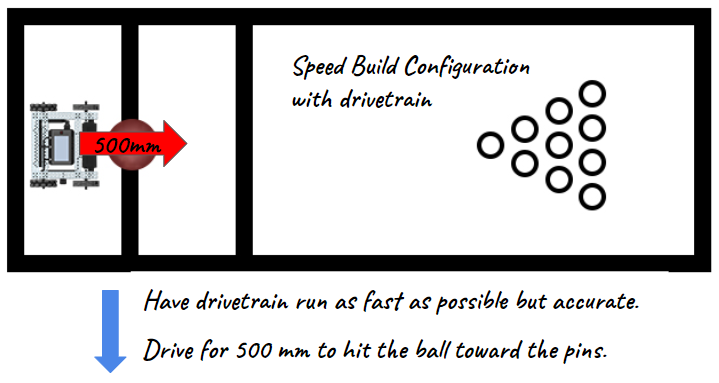
Odpowiedzi najprawdopodobniej będą obejmować szybką i wystarczająco długą jazdę, aby dosięgnąć i popchnąć piłkę do przodu z optymalną siłą, zachowując jednocześnie dokładność. Poproś uczniów, aby wyjaśnili, w jaki sposób zderzenia robota z piłką i piłki z kręglami zostały uwzględnione w ich planach. Połącz to z drugim prawem Newtona, a uczniowie prawdopodobnie będą chcieli ustawić robota tak, aby jechał ze 100% prędkością. Należy jednak podkreślić, że chociaż najwyższa prędkość robota doprowadziłaby do największego przyspieszenia piłki, a następnie kręgli po zderzeniu, najwyższa prędkość robota mogłaby zagrozić dokładności w tym wyzwaniu. Będą musieli znaleźć kompromis między nimi i mogą skorzystać z nowej tabeli poniżej lub swoich poprzednich tabel, aby zebrać dane i wybrać najlepszą prędkość dla tego wyzwania.
-
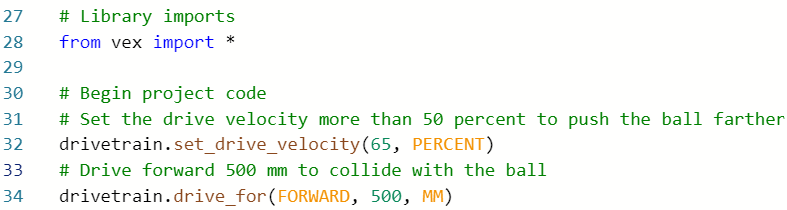
Odpowiedzi powinny obejmować napisanie pseudokodu, zmierzenie odległości, jaką robot musi pokonać, przeliczenie tego pomiaru na milimetry i uruchomienie projektu. Upewnij się, że uczniowie rozumieją, jak na potrzeby programowania konwertować centymetry lub metry na milimetry.
-
Zamiana centymetrów na milimetry wymaga dodania zera na końcu liczby całkowitej. Na przykład 10 cm równa się 100 mm.
-
Zamiana metrów na milimetry wymaga dodania trzech zer na końcu liczby całkowitej. Na przykład 1 m równa się 1000 mm.
-
-
Odpowiedzi mogą obejmować pomiar dokładnej odległości od miejsca początkowego robota do położenia początkowego piłki i wykorzystanie tego pomiaru do zaprogramowania dokładnej odległości, jaką robot musi pokonać. Ważne jest również znalezienie optymalnej prędkości jazdy przy zachowaniu dokładności.
Podczas tworzenia projektu wykonaj poniższe czynności:
-
Zaplanuj ścieżkę, którą chcesz zaprogramować robota, korzystając z rysunków i pseudokodu (Google / .docx / .pdf).
-
Użyj utworzonego pseudokodu do opracowania swojego projektu.
-
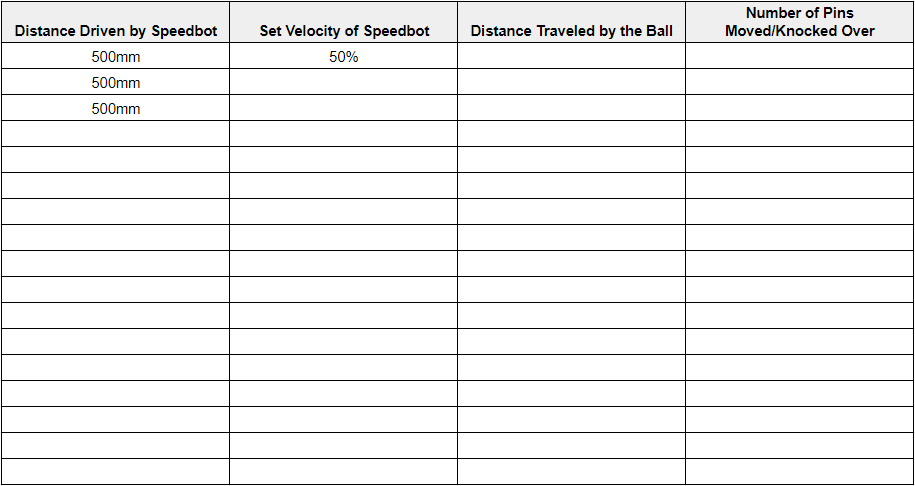
Często testuj swój projekt w Python i wykonuj iteracje, korzystając z tego, czego nauczyłeś się podczas testów. Po każdej próbie zapisz, jak daleko przejechał robot, jaką prędkość ustawiono, jaką odległość przebyła piłka i ile kręgli przesunęło. Oto zaktualizowana tabela do gromadzenia i analizy danych.
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
-
Tablicę dotyczącą wyzwania Strike Challenge można pobrać i wydrukować stąd (Google / .pdf). Uczniowie mogą też odtworzyć tabelę w swoich notatnikach inżynierskich.
-
Poproś uczniów, aby za pomocą linijki zmierzyli proponowaną ścieżkę. Następnie poproś uczniów, aby ocenili swój pseudokod, zanim przejdą do drugiego kroku.
-
Poinstruuj uczniów, aby używali pseudokodu jako komentarzy w swoich projektach, aby pomóc w organizacji, przepływie i rozwiązywaniu problemów. Poproś uczniów, aby ocenili swój pseudokod przed dodaniem instrukcji do swoich projektów. Możesz pobrać rubrykę pseudokodu tutaj (Google / .docx / .pdf).
-
W miarę kontynuacji fazy testowania przejrzyj tabele danych uczniów i poproś grupy o wyjaśnienie, w jaki sposób wybrały najlepszą prędkość dla danego wyzwania. Dwie główne zmienne, na których należy się skupić, to prędkość robota i liczba przesuniętych kręgli, ale można również wziąć pod uwagę przybliżoną odległość przebytą przez piłkę. Ponownie zachęcaj do testowania, które manipuluje tylko jedną zmienną na raz: prędkością robota.