
Répondez aux questions suivantes dans votre cahier d’ingénierie pendant que vous concevez votre projet.
- Que voulez-vous que le projet fasse au robot ? Expliquez avec des détails.
- Quelles étapes allez-vous suivre pour tester le projet ? Expliquez avec des détails.
- Comment votre robot peut-il être programmé pour accomplir la tâche avec le plus de précision possible ? Expliquez avec des détails.
![]() Boîte à outils de l'enseignant
-
réponses
Boîte à outils de l'enseignant
-
réponses
-
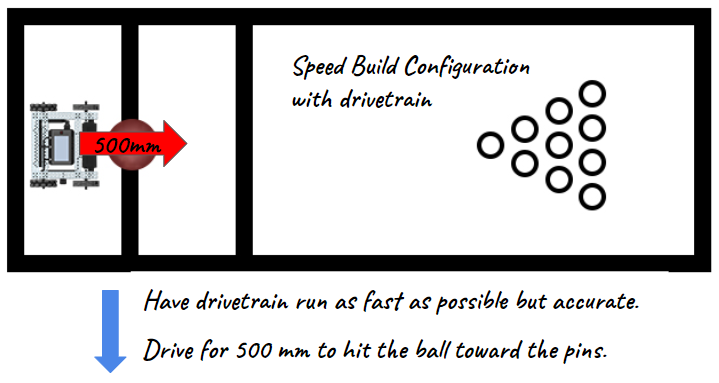
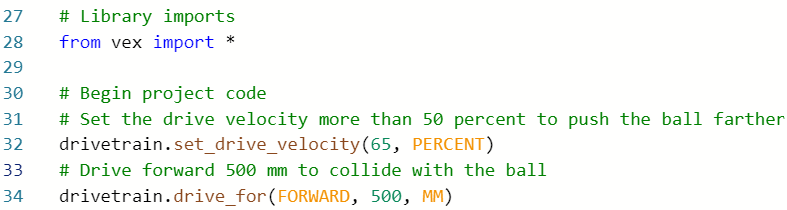
Les réponses incluront probablement conduire rapidement et suffisamment loin pour atteindre et pousser le ballon vers l’avant avec une force optimale tout en conservant la précision. Demandez aux élèves d'expliquer comment les collisions du robot avec la balle et de la balle avec les quilles ont été prises en compte dans leurs plans. Reliez cela à la deuxième loi de Newton et les élèves voudront probablement régler le robot pour qu'il se déplace à une vitesse de 100 %. Mais soulignons que même si la vitesse la plus élevée pour le robot entraînerait la plus grande accélération de la balle et par la suite des quilles après la collision, la vitesse la plus élevée pour le robot pourrait compromettre la précision de ce défi. Ils devront trouver un compromis entre les deux et pourront utiliser le nouveau tableau ci-dessous ou leurs tableaux précédents pour collecter des données et décider de la meilleure vitesse pour ce défi.
-
Les réponses doivent inclure l'écriture d'un pseudocode, la mesure de la distance que le robot doit parcourir, la conversion de cette mesure en millimètres et l'exécution du projet. Assurez-vous que les élèves comprennent comment convertir des centimètres ou des mètres en millimètres pour la programmation.
-
Pour convertir des centimètres en millimètres, il faut ajouter un zéro à la fin du nombre entier. Par exemple, 10 cm équivaut à 100 mm.
-
Pour convertir des mètres en millimètres, il faut ajouter trois zéros à la fin du nombre entier. Par exemple, 1 m équivaut à 1 000 mm.
-
-
Les réponses pourraient inclure la mesure de la distance exacte entre l'emplacement de départ du robot et la position de départ de la balle et l'utilisation de cette mesure pour programmer la distance précise que le robot doit parcourir. De plus, il est important de trouver la vitesse optimale pour conduire tout en conservant la précision.
Suivez les étapes ci-dessous lorsque vous créez votre projet :
-
Planifiez le chemin que vous souhaitez programmer votre robot à suivre à l'aide de dessins et de pseudocodes (Google / .docx / .pdf).
-
Utilisez le pseudocode que vous avez créé pour développer votre projet.
-
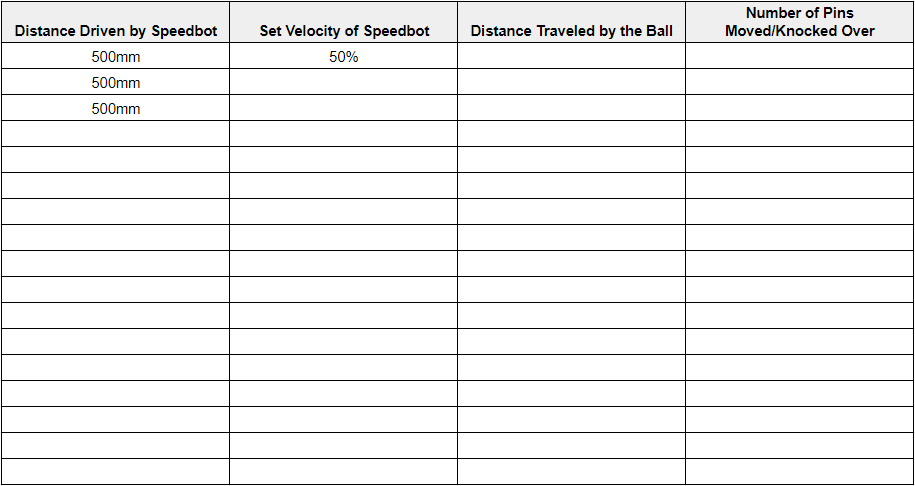
Testez souvent votre projet en Python et répétez-le en utilisant ce que vous avez appris de vos tests. Après chaque essai, enregistrez la distance parcourue par le robot, la vitesse réglée, la distance parcourue par la balle et le nombre de quilles déplacées. Voici un tableau mis à jour pour la collecte et l’analyse des données.
![]() Conseils aux enseignants
Conseils aux enseignants
-
Le tableau du Strike Challenge peut être téléchargé et imprimé à partir d'ici (Google / .pdf), ou les étudiants peuvent recréer le tableau dans leurs cahiers d'ingénierie.
-
Demandez aux élèves d’utiliser une règle pour mesurer le chemin qu’ils proposent. Demandez ensuite aux élèves d’évaluer leur pseudocode avant de passer à la deuxième étape.
-
Demandez aux étudiants d'utiliser le pseudocode comme commentaires dans leur projet pour faciliter l'organisation, le flux et le dépannage. Demandez aux élèves d'évaluer leur pseudocode avant d'ajouter des instructions à leurs projets. Vous pouvez télécharger une rubrique pseudocode ici (Google / .docx / .pdf).
-
Pendant que la phase de test se poursuit, examinez les tableaux de données des élèves et demandez aux groupes d'expliquer comment ils ont choisi la meilleure vitesse pour le défi. Les deux principales variables sur lesquelles ils doivent se concentrer sont la vitesse du robot et le nombre de quilles déplacées, mais la distance approximative parcourue par la balle peut également être prise en compte. Encore une fois, encouragez les tests qui manipulent une seule variable à la fois : la vitesse du robot.