
Во время разработки проекта ответьте на следующие вопросы в своей инженерной тетради.
- Что вы хотите, чтобы в проекте делал робот? Объясните подробно.
- Какие шаги вы предпримете для тестирования проекта? Объясните подробно.
- Как можно запрограммировать вашего робота на выполнение задачи с максимальной точностью? Объясните подробно.
![]() Набор инструментов учителя
Набор инструментов учителя
-
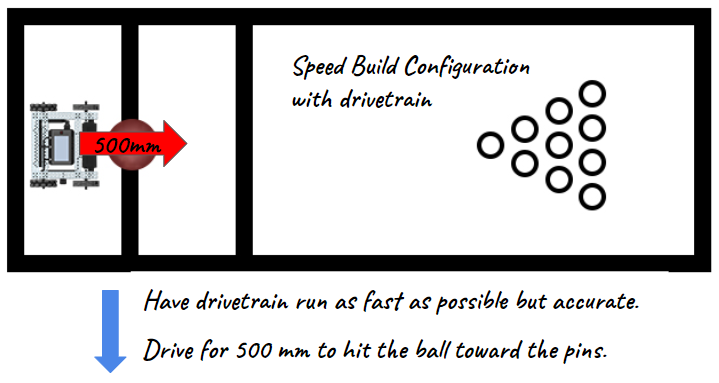
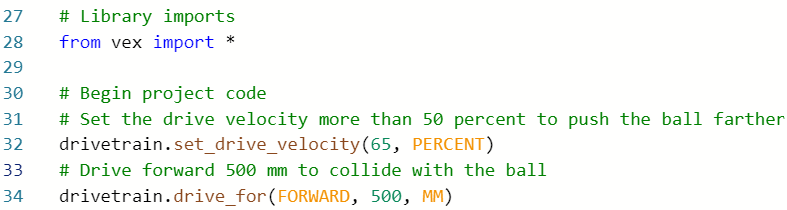
Ответы, скорее всего, будут включать в себя езду быстро и достаточно далеко, чтобы дотянуться до мяча и протолкнуть его вперед с оптимальной силой, сохраняя при этом точность. Попросите учащихся объяснить, как столкновения робота с мячом и мяча с кеглями повлияли на их планы. Соедините это со вторым законом Ньютона, и студенты, скорее всего, захотят заставить робота двигаться со 100%-ной скоростью. Но обратите внимание: хотя самая высокая скорость робота приведет к наибольшему ускорению мяча, а затем и кеглей после столкновения, самая высокая скорость робота может поставить под угрозу точность в этой задаче. Им нужно будет найти компромисс между ними, и они смогут использовать новую таблицу ниже или предыдущие таблицы для сбора данных и определения наилучшей скорости для решения этой задачи.
-
Ответы должны включать написание псевдокода, измерение расстояния, которое должен пройти робот, преобразование этого измерения в миллиметры и запуск проекта. Убедитесь, что учащиеся понимают, как конвертировать сантиметры или метры в миллиметры для программирования.
-
Для перевода сантиметров в миллиметры необходимо добавить ноль в конец целого числа. Например, 10 см = 100 мм.
-
Для перевода метров в миллиметры необходимо добавить три нуля в конец целого числа. Например, 1 м равен 1000 мм.
-
-
Ответы могут включать измерение точного расстояния от начальной позиции робота до начальной позиции мяча и использование этого измерения для программирования точного расстояния, которое должен пройти робот. Также важно найти оптимальную скорость движения, сохраняя при этом точность.
При создании проекта выполните следующие действия:
-
Спланируйте путь по которому вы хотите запрограммировать своего робота используя рисунки и псевдокод (Google .docx .pdf).
-
Используйте созданный вами псевдокод для разработки своего проекта.
-
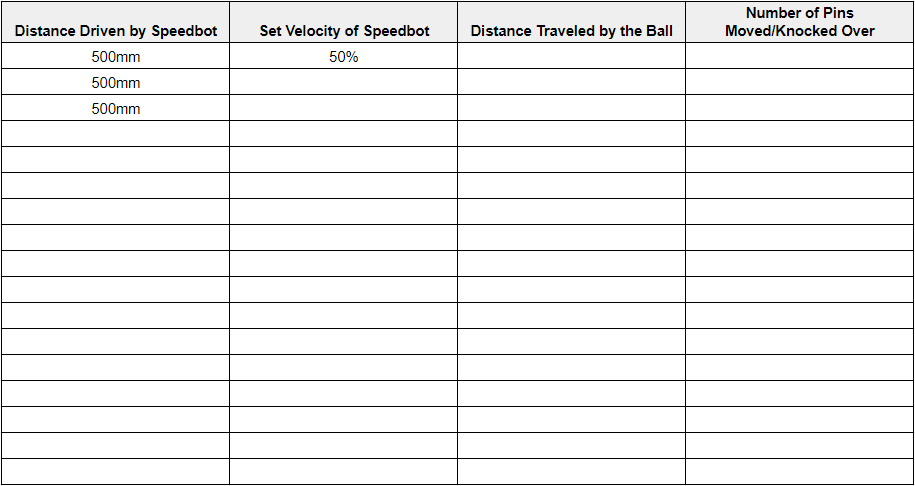
Часто тестируйте свой проект в на Python и повторяйте его, используя то, что вы узнали в ходе тестирования. После каждого испытания записывайте, какое расстояние проехал робот, какая была установлена скорость, какое расстояние пролетел мяч и сколько кеглей было перемещено. Вот обновленная таблица для сбора и анализа данных.
![]() Советы учителям
Советы учителям
-
Таблицу для Strike Challenge можно скачать и распечатать отсюда (Google ), или учащиеся могут воссоздать таблицу в своих инженерных тетрадях.
-
Попросите учащихся использовать линейку, чтобы измерить предполагаемый путь. Затем попросите учащихся оценить свой псевдокод, прежде чем переходить ко второму шагу.
-
Попросите учащихся использовать псевдокод в качестве комментариев в своих проектах, чтобы облегчить организацию, поток и устранение неполадок. Попросите учащихся оценить свой псевдокод, прежде чем добавлять инструкции в свои проекты. Рубрику псевдокода можно скачать здесь (Google / .docx / .pdf).
-
По мере продолжения этапа тестирования просмотрите таблицы данных учащихся и попросите группы объяснить, как они выбрали лучшую скорость для решения задачи. Двумя основными переменными, на которых им следует сосредоточиться, являются скорость робота и количество перемещенных кеглей, но также можно учитывать приблизительное расстояние, пройденное мячом. Опять же, поощряйте тестирование, которое одновременно манипулирует только одной переменной: скоростью робота.