
Thiết kế, Phát triển và Lặp lại Dự án của bạn - Python
Trả lời các câu hỏi sau trong sổ ghi chép kỹ thuật của bạn khi bạn thiết kế dự án của mình.
- Bạn muốn dự án có robot làm gì? Giải thích chi tiết.
- Bạn sẽ làm theo những bước nào để kiểm tra dự án? Giải thích chi tiết.
- Robot của bạn có thể được lập trình như thế nào để hoàn thành nhiệm vụ với độ chính xác cao nhất? Giải thích chi tiết.
![]() Hộp công cụ giáo viên
-
Câu trả lời
Hộp công cụ giáo viên
-
Câu trả lời
-
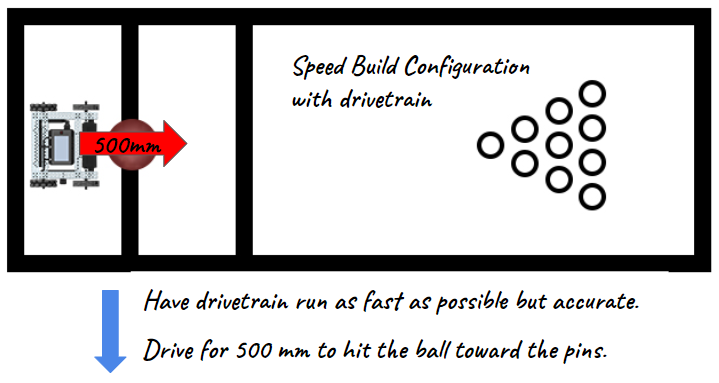
Câu trả lời có thể bao gồm việc lái bóng nhanh và đủ xa để có thể với tới và đẩy bóng về phía trước với lực tối ưu trong khi vẫn duy trì được độ chính xác. Yêu cầu học sinh giải thích cách thức va chạm giữa robot với quả bóng và giữa quả bóng với chốt được tính đến trong kế hoạch của họ. Kết nối điều này trở lại Định luật thứ hai của Newton và học sinh có thể sẽ muốn thiết lập robot lái ở tốc độ 100%. Nhưng cần lưu ý rằng mặc dù vận tốc cao nhất của robot sẽ dẫn đến gia tốc lớn nhất của quả bóng và sau đó là các chốt sau va chạm, nhưng vận tốc cao nhất của robot có thể gây nguy hiểm cho độ chính xác trong thử thách này. Họ sẽ cần tìm ra sự thỏa hiệp giữa hai điều này và có thể sử dụng bảng mới bên dưới hoặc các bảng trước đó để thu thập dữ liệu và quyết định tốc độ tốt nhất cho thử thách này.
-
Câu trả lời phải bao gồm việc viết mã giả, đo khoảng cách mà robot cần di chuyển, chuyển đổi phép đo đó sang milimét và chạy dự án. Đảm bảo rằng học sinh hiểu cách chuyển đổi centimet hoặc mét sang milimét để lập trình.
-
Để chuyển đổi từ centimet sang milimét, bạn phải thêm số 0 vào cuối số nguyên. Ví dụ, 10cm bằng 100mm.
-
Để chuyển đổi mét sang milimét, cần phải thêm ba số 0 vào cuối số nguyên. Ví dụ, 1m bằng 1000mm.
-
-
Câu trả lời có thể bao gồm việc đo khoảng cách chính xác từ vị trí bắt đầu của robot đến vị trí bắt đầu của quả bóng và sử dụng phép đo đó để lập trình khoảng cách chính xác mà robot cần di chuyển. Ngoài ra, điều quan trọng là phải tìm được tốc độ lái xe tối ưu trong khi vẫn đảm bảo độ chính xác.
Thực hiện theo các bước dưới đây khi bạn tạo dự án của mình:
- Lập kế hoạch cho con đường bạn muốn lập trình robot của mình đi theo bằng cách sử dụng bản vẽ và mã giả (Google / .docx / .pdf).
- Sử dụng mã giả bạn đã tạo để phát triển dự án của mình.
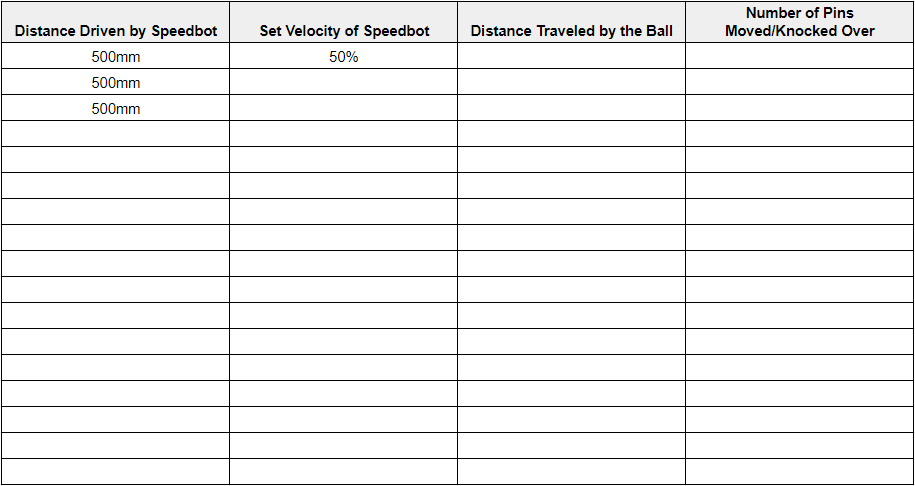
- Hãy thường xuyên kiểm tra dự án của bạn bằnglặp lại bằng những gì bạn đã học được từ quá trình kiểm tra. Sau mỗi lần thử nghiệm, hãy ghi lại khoảng cách mà robot đã đi, vận tốc được đặt là bao nhiêu, khoảng cách mà quả bóng đã di chuyển và số lượng ghim được di chuyển. Dưới đây là bảng cập nhật để thu thập và phân tích dữ liệu.
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
- Bảng cho Thử thách đình công có thể được tải xuống và in từ đây (Google / .pdf), hoặc sinh viên có thể tạo lại bảng trong sổ tay kỹ thuật của mình.
-
Yêu cầu học sinh sử dụng thước kẻ để đo đường đi mà họ đề xuất. Sau đó, yêu cầu học sinh đánh giá mã giả của mình trước khi chuyển sang bước thứ hai.
-
Hướng dẫn học sinh sử dụng mã giả làm chú thích trong dự án của mình để hỗ trợ tổ chức, luồng và khắc phục sự cố. Yêu cầu học sinh đánh giá mã giả của mình trước khi thêm hướng dẫn vào dự án. Bạn có thể tải xuống tiêu chí mã giả tại đây (Google / .docx / .pdf). Xem mã mẫu bên dưới để tham khảo khi bạn giúp học sinh hoàn thành thử thách:
# Thư viện nhập từ vex import * # Bắt đầu mã dự án # Đặt tốc độ truyền động lên hơn 50 phần trăm để đẩy bóng đi xa hơn drivetrain.set_drive_velocity(65, PERCENT) # Tiến về phía trước 500mm để va chạm với bóng drivetrain.drive_for(FORWARD, 500, MM) - Khi giai đoạn thử nghiệm tiếp tục, hãy xem lại bảng dữ liệu của học sinh và yêu cầu các nhóm giải thích cách họ chọn vận tốc tốt nhất cho thử thách. Hai biến số chính mà họ nên tập trung vào là vận tốc của robot và số lượng chốt di chuyển nhưng khoảng cách di chuyển gần đúng của quả bóng cũng có thể được xem xét. Một lần nữa, hãy khuyến khích thử nghiệm chỉ tác động vào một biến tại một thời điểm: tốc độ của robot.