
Rispondi alle seguenti domande nel tuo quaderno di ingegneria mentre progetti il tuo progetto.
- Cosa vuoi che il progetto faccia fare al robot? Spiegare con dettagli.
- Quali passaggi seguirai per testare il progetto? Spiegare con dettagli.
- Come può essere programmato il tuo robot per completare l'attività con la massima precisione? Spiegare con dettagli.
![]() Casella degli strumenti per l'insegnante
-
risposte
Casella degli strumenti per l'insegnante
-
risposte
-
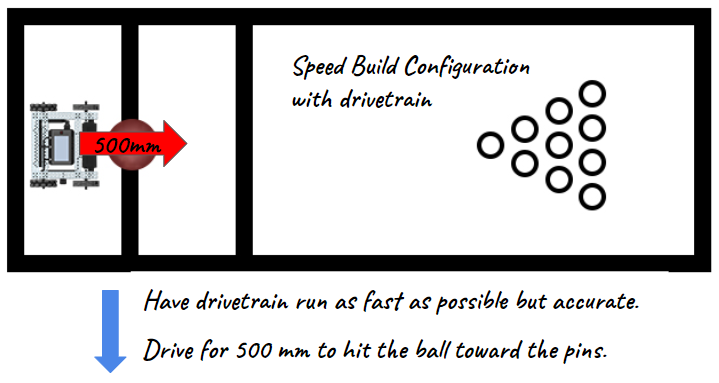
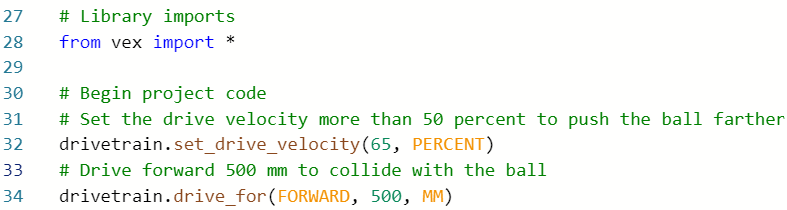
Le risposte probabilmente includeranno la guida veloce e abbastanza lontana da raggiungere e spingere la palla in avanti con una forza ottimale mantenendo la precisione. Chiedere agli studenti di spiegare in che modo le collisioni del robot con la palla e della palla con i birilli hanno influito sui loro piani. Collegandolo alla Seconda Legge di Newton, gli studenti probabilmente vorranno impostare il robot in modo che guidi al 100% della velocità. Ma sottolinea che, sebbene la velocità più alta per il robot porterebbe alla maggiore accelerazione della palla e successivamente dei birilli dopo la collisione, la velocità più alta per il robot potrebbe mettere a repentaglio la precisione in questa sfida. Dovranno trovare un compromesso tra i due e potranno utilizzare la nuova tabella seguente o le tabelle precedenti per raccogliere dati e decidere la velocità migliore per questa sfida.
-
Le risposte dovrebbero includere la scrittura di uno pseudocodice, la misurazione della distanza che il robot deve percorrere, la conversione di tale misura in millimetri e l'esecuzione del progetto. Assicurati che gli studenti capiscano come convertire centimetri o metri in millimetri per la programmazione.
-
Per convertire i centimetri in millimetri è necessario aggiungere uno zero alla fine del numero intero. Ad esempio, 10 cm equivalgono a 100 mm.
-
Per convertire i metri in millimetri è necessario aggiungere tre zeri alla fine dell'intero numero. Ad esempio, 1 m equivale a 1000 mm.
-
-
Le risposte potrebbero includere la misurazione della distanza esatta tra la posizione iniziale del robot e la posizione iniziale della palla e l'utilizzo di tale misurazione per programmare la distanza precisa che il robot deve percorrere. Inoltre, è importante trovare la velocità ottimale per la guida mantenendo la precisione.
Segui i passaggi seguenti mentre crei il tuo progetto:
-
Pianifica il percorso che vuoi programmare per far seguire al tuo robot utilizzando disegni e pseudocodice (Google / .docx / .pdf).
-
Utilizza lo pseudocodice che hai creato per sviluppare il tuo progetto.
-
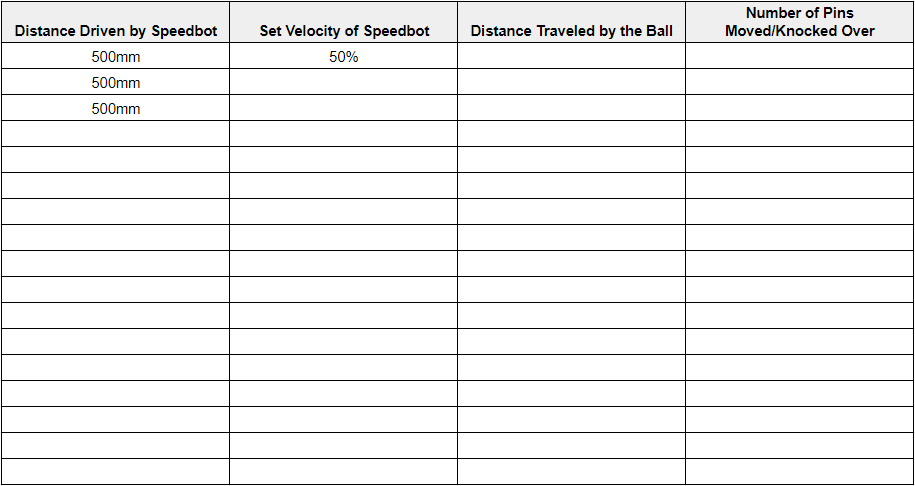
Testa spesso il tuo progetto in Python e ripetilo utilizzando ciò che hai imparato dai test. Dopo ogni prova, registra la distanza percorsa dal robot, la velocità impostata, la distanza percorsa dalla palla e il numero di birilli spostati. Ecco una tabella aggiornata per la raccolta e l'analisi dei dati.
![]() Suggerimenti per gli insegnanti
Suggerimenti per gli insegnanti
-
La tabella per la Strike Challenge può essere scaricata e stampata da qui (Google / .pdf), oppure gli studenti possono ricreare la tabella nei loro quaderni di ingegneria.
-
Chiedi agli studenti di utilizzare un righello per misurare il percorso proposto. Quindi, chiedi agli studenti di valutare il loro pseudocodice prima di passare alla seconda fase.
-
Chiedi agli studenti di utilizzare lo pseudocodice come commenti nel loro progetto per facilitare l'organizzazione, il flusso e la risoluzione dei problemi. Chiedi agli studenti di valutare il loro pseudocodice prima di aggiungere istruzioni ai loro progetti. Puoi scaricare una rubrica dello pseudocodice qui (Google / .docx / .pdf).
-
Mentre la fase di test continua, rivedi le tabelle dei dati degli studenti e chiedi ai gruppi di spiegare come hanno scelto la velocità migliore per la sfida. Le due variabili principali su cui dovrebbero concentrarsi sono la velocità del robot e il numero di birilli spostati, ma potrebbe essere considerata anche la distanza approssimativa percorsa dalla palla. Ancora una volta, incoraggiare i test che manipolano solo una variabile alla volta: la velocità del robot.