
Leçon 1 : Capteurs oculaires dans un projet VR VEXcode
Utilisation des capteurs oculaires dans un projet VEXcode VR
Les capteurs oculaires du robot VR peuvent être utilisés de nombreuses façons. Notez que le capteur Down Eye ne détecte pas le sol d'une aire de jeux en tant qu'objet. D'autres éléments, tels que les disques, seront enregistrés en tant qu'objets. Le capteur oculaire avant détecte les murs dans les aires de jeux.
Les capteurs oculaires peuvent détecter la couleur d'un objet à proximité du capteur, comme les disques colorés dans le terrain de jeu du labyrinthe de disques. Ceci est utile si vous souhaitez que le robot VR trie des objets de couleurs différentes, se dirige vers un objet de couleur spécifique ou adopte différents comportements en fonction de la couleur d'un objet détecté.
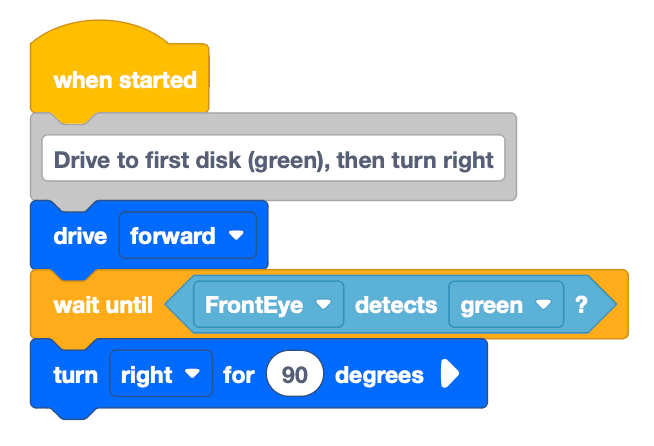
Dans ce projet, le robot VR avancera jusqu'à ce que l'œil avant détecte un objet vert. Une fois qu'un objet vert est détecté, le robot VR tourne à droite.
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf