
Lección 1: Sensores oculares en un proyecto VEXcode VR
Uso de los sensores oculares en un proyecto VEXcode VR
Los sensores oculares del robot VR se pueden utilizar de muchas maneras. Tenga en cuenta que el sensor Down Eye no detecta el suelo de un patio de recreo como un objeto. Otros elementos, como los discos, se registrarán como objetos. El sensor de ojo frontal detecta las paredes en los patios de recreo.
Los sensores oculares pueden detectar el color de un objeto cerca del sensor, como los discos de colores en el área de juegos del laberinto de discos. Esto es útil si desea que el robot VR clasifique objetos de diferentes colores, conduzca hasta un objeto de un color específico o realice diferentes comportamientos en función del color de un objeto detectado.
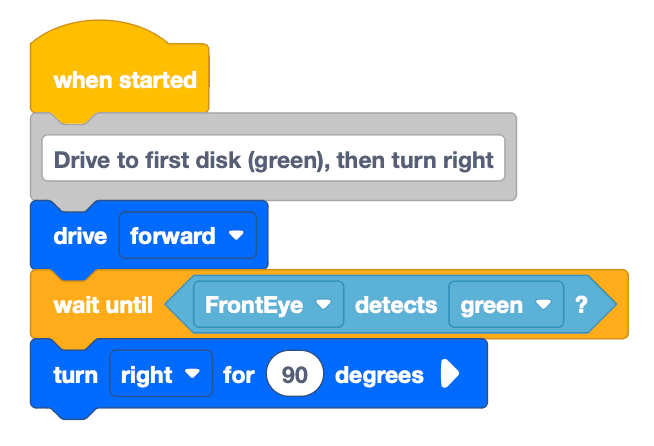
En este proyecto, el robot VR avanzará hasta que el ojo delantero detecte un objeto verde. Una vez que se detecta un objeto verde, el robot VR girará a la derecha.
Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf