
Lektion 1: Augensensoren in einem VEXcode VR-Projekt
Verwenden der Augensensoren in einem VEXcode VR-Projekt
Die Augensensoren am VR-Roboter sind vielseitig einsetzbar. Beachten Sie, dass der Down Eye Sensor den Boden eines Spielplatzes nicht als Objekt erkennt. Andere Elemente, wie z. B. Festplatten, werden als Objekte registriert. Der Front Eye Sensor erkennt Wände auf den Spielplätzen.
Die Augensensoren können die Farbe eines Objekts in der Nähe des Sensors erkennen, z. B. die farbigen Scheiben im Disk Maze Playground. Dies ist nützlich, wenn Sie möchten, dass der VR-Roboter unterschiedlich gefärbte Objekte sortiert, zu einem spezifisch gefärbten Objekt fährt oder verschiedene Verhaltensweisen basierend auf der Farbe eines erkannten Objekts ausführt.
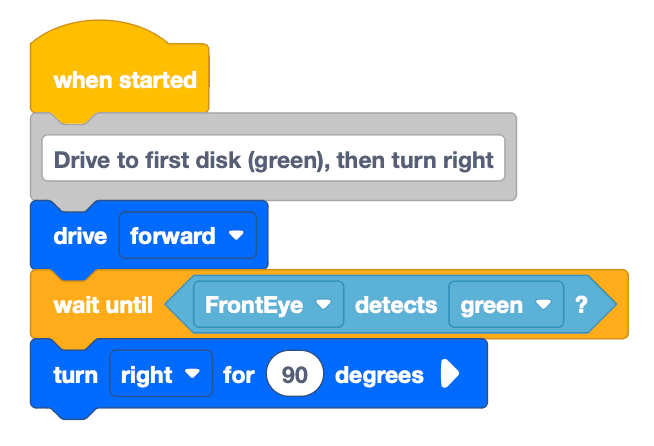
In diesem Projekt fährt der VR-Roboter vorwärts, bis das vordere Auge ein grünes Objekt erkennt. Sobald ein grünes Objekt erkannt wird, dreht sich der VR-Roboter nach rechts.
Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf