
Lição 1: Sensores oculares num projeto VEXcode VR
Utilizar os sensores oculares num projeto VEXcode VR
Os sensores oculares no robô VR podem ser usados de várias maneiras. Observe que o Sensor de Down Eye não detecta o chão de um Playground como um objeto. Outros itens, como discos, serão registados como objetos. O Sensor de Olhos Frontal detecta paredes nos Parques Infantis.
Os sensores oculares podem detectar a cor de um objeto perto do sensor, como os discos coloridos no Disk Maze Playground. Isso é útil se você quiser que o Robô VR classifique objetos de cores diferentes, dirija até um objeto especificamente colorido ou execute comportamentos diferentes com base na cor de um objeto detectado.
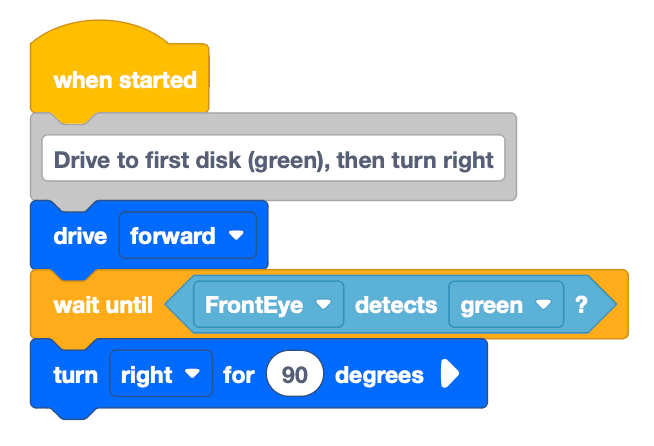
Neste projeto, o Robô VR avançará até que o Olho Frontal detecte um objeto verde. Assim que um objeto verde for detectado, o Robô VR irá virar à direita.
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf