수업 1: VEXcode VR 프로젝트의 눈 센서
VEXcode VR 프로젝트에서 눈 센서 사용
VR 로봇의 눈 센서는 다양한 방법으로 활용될 수 있습니다. 다운 아이 센서는 놀이터의 바닥을 물체로 감지하지 않는다는 점에 유의하세요. 디스크와 같은 다른 항목은 객체로 등록됩니다. 전방 눈 센서는 놀이터의 벽을 감지합니다.
눈 센서는 디스크 미로 놀이터의 색깔 있는 디스크처럼 센서 근처에 있는 물체의 색상을 감지할 수 있습니다. 이 기능은 VR 로봇이 다양한 색상의 물체를 분류하거나, 특정 색상의 물체로 이동하거나, 감지된 물체의 색상에 따라 다른 행동을 수행하도록 하려는 경우에 유용합니다.
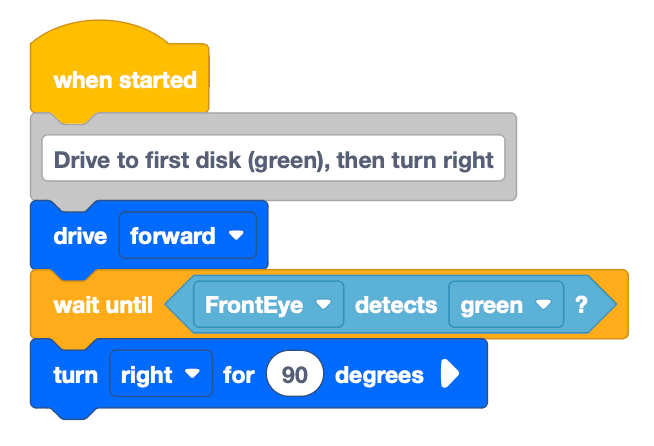
이 프로젝트에서 VR 로봇은 프런트아이가 녹색 물체를 감지할 때까지 앞으로 주행합니다. 녹색 물체가 감지되면 VR 로봇이 오른쪽으로 회전합니다.