
Pelajaran 2: Mekanisme Keselamatan dan Tindakan Pencegahan
Dalam Pelajaran ini, Anda akan mempelajari tentang tindakan keselamatan penting lainnya yang mencegah kecelakaan dan menjamin keselamatan pekerja, yaitu penghentian darurat.
Anda akan belajar:
- Apa itu penghentian darurat, dan untuk apa digunakan.
- Perbedaan antara pemberhentian terkendali dan tak terkendali.
- Mekanisme dan standar keselamatan lainnya dalam robotika industri.
- Cara kerja penghentian terkendali pada CTE Workcell.
Di akhir Pelajaran ini, Anda akan meninjau apa yang Anda pelajari saat menjawab pertanyaan di buku catatan teknik Anda.
Pemberhentian Darurat
Penghentian darurat, juga dikenal sebagai e-stop, adalah mekanisme keselamatan penting yang dirancang untuk menjaga pekerja dan peralatan tetap aman dari bahaya jika terjadi situasi berbahaya. E-stop merupakan standar di seluruh otomatisasi industri, dan dirancang untuk menghentikan operasi robotik dengan cepat dalam keadaan darurat, mencegah cedera pada pekerja, dan menjaga keamanan peralatan. E-stop dipicu oleh tindakan tunggal, seperti tombol tekan. Setelah e-stop dimulai, operator harus bertindak secara sengaja agar dapat memulai kembali operasi dengan aman.

Dalam robotika industri, penghentian darurat dapat dimulai dalam berbagai keadaan. Misalnya, kegagalan motor atau kesalahan pemrograman dapat menimbulkan risiko pada peralatan atau personel. Bila kesalahan terdeteksi, e-stop dapat dimulai oleh pekerja, memberitahukan sel kerja untuk menghentikan operasi. Contoh lain di mana e-stop dapat diaktifkan termasuk bahaya yang tidak terduga, seperti:
- kebakaran.
- seorang pekerja melangkah ke jalur lengan robot.
- penghalang yang jatuh ke dalam jangkauan lengan robot sehingga kemungkinan terjadinya tabrakan.
Memicu e-stop dapat mencegah bahaya pada pekerja dan membantu menghindari kerusakan mahal.
Penghentian Terkendali vs. Penghentian Tak Terkendali
Ada dua kategori pemberhentian darurat: terkendali dan tak terkendali. Apakah akan menggunakan pemberhentian terkendali atau tidak terkendali tergantung pada situasinya. Penghentian terkendali bertahap menurun tetapi tidak sepenuhnya menghilangkan daya ke mesin. Misalnya, jika para pekerja diposisikan di bawah rangka mobil berat pada jalur perakitan, dan penghentian darurat dipicu karena adanya halangan pada lengan robot, maka penghentian terkendali akan digunakan. Hal ini secara bertahap akan memperlambat gerakan apa pun, sehingga mesin dapat berhenti dengan mulus, dan memberi waktu bagi pekerja untuk minggir.
Penghentian yang tidak terkendali segera menghilangkan semua daya ke mesin. Pada contoh rangka mobil, hilangnya seluruh daya dapat menyebabkan rangka mobil jatuh menimpa pekerja di bawahnya. Akan tetapi, jika terjadi kejadian seperti kebakaran listrik, penghentian yang tidak terkendali akan digunakan, karena akan langsung memutus aliran listrik ke mesin.
Standar untuk Penghentian Darurat dalam Robotika Industri
Standar dan undang-undang industri secara luas mengatur penggunaan e-stop dalam robotika industri, membantu memastikan standar keselamatan pekerja yang tinggi di seluruh industri. Beberapa badan standar ini meliputi:
- Robotic Industry Association (RIA): Asosiasi yang menetapkan standar keselamatan untuk robot industri.
- American National Standards Institute (ANSI): Sebuah lembaga yang menetapkan standar keselamatan di tempat kerja di Amerika Serikat.
- Organisasi Internasional untuk Standardisasi (ISO): Organisasi yang memelihara standar internasional untuk keselamatan di tempat kerja.
- Administrasi Keselamatan dan Kesehatan Kerja (OSHA): Administrasi federal yang menetapkan dan menegakkan peraturan keselamatan di tempat kerja.
Jenis-jenis standardisasi meliputi jenis mekanisme yang digunakan untuk memicu penghentian e, warna mekanisme, dan posisi mekanisme. Misalnya, e-stop harus diberi warna merah dan kuning agar mudah dilihat. Mereka hendaknya hanya memerlukan satu tindakan saja untuk memulainya, dan harus diposisikan di luar jangkauan lengan robot, sehingga pekerja tidak perlu menyeberang ke tempat yang membahayakan untuk mengaktifkannya. Mereka juga harus ditempatkan di lokasi yang mudah diakses oleh operator. Ini hanyalah beberapa standar yang diterapkan untuk menjaga keselamatan pekerja saat menggunakan e-stop.

Mekanisme Keamanan Lainnya
Banyak perangkat lain yang digunakan untuk membantu memastikan keselamatan operator robot industri. Mekanisme keselamatan sering digunakan bersamaan satu sama lain. Pengaturan industri di dunia nyata menggunakan berbagai perangkat keselamatan, mekanisme, dan tindakan pencegahan untuk memastikan keselamatan pekerja, termasuk:
- Penghalang dan Pelindung Keselamatan: Penghalang fisik yang memisahkan robot dari pekerja manusia untuk mencegah kontak yang tidak disengaja. Ini termasuk pagar, kandang, dan struktur lain yang dirancang untuk membatasi akses ke area berbahaya.
- Perangkat Penginderaan Kehadiran: Sensor yang mendeteksi keberadaan manusia atau objek dalam area tertentu. Ini dapat menghentikan operasi robot jika intrusi terdeteksi.
- Lengan Sensor: Lengan robot yang dilengkapi sensor untuk mendeteksi kontak dengan manusia atau benda. Sensor ini dapat memicu penghentian atau memperlambat robot untuk mencegah cedera atau kerusakan.
- Matras Tekanan: Matras yang diletakkan di lantai di sekitar robot yang mendeteksi tekanan atau berat. Jika seseorang menginjak matras, robot akan berhenti beroperasi untuk mencegah kecelakaan.
- Alarm: Sistem peringatan suara dan visual yang memperingatkan pekerja akan keberadaan robot aktif atau kondisi yang tidak aman. Alarm ini dapat dipicu oleh berbagai sistem keselamatan atau secara manual oleh operator.
- Tirai Cahaya: Rangkaian sinar cahaya yang menciptakan penghalang tak terlihat di sekitar area berbahaya. Jika ada sinar yang terganggu, robot segera dihentikan untuk memastikan keselamatan personel.

Penghentian Terkendali pada Sel Kerja CTE
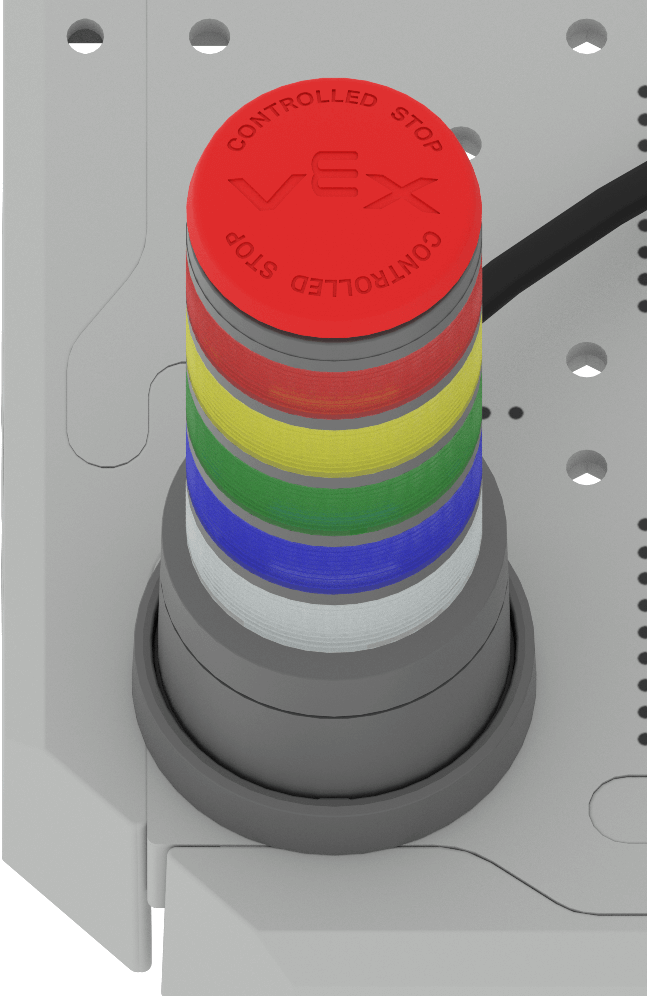
Pada CTE Workcell, tombol di atas Menara Sinyal dapat memicu penghentian terkendali saat ditekan.
Anda akan melihat tombol bertuliskan "Controlled Stop" di permukaannya. Bila dikodekan untuk berfungsi sebagai penghentian terkendali, tombol tersebut dapat ditekan jika ada komponen Workcell yang bergerak dengan cara yang membahayakan dirinya sendiri atau pengguna.
BlokSaat bemper menara sinyal ditekan?digunakan untuk mengodekan fungsionalitas pemberhentian terkendali.
Ada tumpukan blok dalam proyek Brain CTE 6-Axis Arm Template yang memungkinkan fungsionalitas penghentian terkendali. Anda akan mempelajari lebih lanjut tentang pengkodean Menara Sinyal di Pelajaran berikutnya.

Anda akan melihat bahwa Menara Sinyal pada bangunan Anda terletak di luar jalur Lengan 6-Sumbu, sehingga dapat dengan mudah ditekan dengan cara yang aman jika diperlukan.

Periksa Pemahaman Anda
Sebelum Anda melanjutkan ke Pelajaran berikutnya, pastikan Anda memahami konsep yang dibahas dalam Pelajaran ini dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda > (Google Doc / .docx / .pdf)
PilihBerikutnya >untuk melanjutkan ke Pelajaran berikutnya.