
വിഷൻ ഡാറ്റ ചലഞ്ചിനായി തയ്യാറെടുക്കുക
![]() അധ്യാപക ഉപകരണപ്പെട്ടി
-
ഈ പ്രവർത്തനത്തിന്റെ ഉദ്ദേശ്യം
അധ്യാപക ഉപകരണപ്പെട്ടി
-
ഈ പ്രവർത്തനത്തിന്റെ ഉദ്ദേശ്യം
വിഷൻ സെൻസർ വിവിധ ഡാറ്റകൾ നൽകുന്നു, അത് പിന്നീട് പ്രോജക്റ്റുകളിൽ ഉപയോഗിക്കാൻ കഴിയും. സെൻസിംഗ് ബ്ലോക്കുകൾ ഉപയോക്താവിന് പ്രോജക്റ്റ് സ്നാപ്പ്ഷോട്ടുകൾ എടുക്കാൻ അനുവദിക്കുന്നു, ഒബ്ജക്റ്റ് നിലവിലുണ്ടോ എന്ന് തീരുമാനിക്കുന്നു, എത്രയെണ്ണം നിലവിലുണ്ടെന്ന് തീരുമാനിക്കുന്നു, വിഷൻ സെൻസറിന്റെ സ്നാപ്പ്ഷോട്ടിനുള്ളിൽ ഒബ്ജക്റ്റിന്റെ കേന്ദ്രം X, Y കോർഡിനേറ്റുകൾ നിർണ്ണയിക്കുന്നു, സ്നാപ്പ്ഷോട്ടിനുള്ളിൽ പിക്സലുകളിൽ ഒബ്ജക്റ്റിന്റെ വീതിയും ഉയരവും നിർണ്ണയിക്കുന്നു. വിഷൻ ഡാറ്റ ചലഞ്ചിനുള്ള തയ്യാറെടുപ്പിനായി ആ വിവരങ്ങൾ ശേഖരിക്കുന്നതിന് ആവശ്യമായ എല്ലാ അനുബന്ധ ബ്ലോക്കുകളെയും ഈ പ്രവർത്തനം പരിചയപ്പെടുത്തും.
റീതിങ്കിന്റെ വിഷൻ ഡാറ്റ ചലഞ്ചിന്റെ ഒരു രൂപരേഖ താഴെ കൊടുക്കുന്നു:
-
വിഷൻ സെൻസറിന്റെ സെൻസിംഗ് ബ്ലോക്കുകളിൽ നിന്ന് ശേഖരിച്ച വിവരങ്ങളുടെ പൂർണ്ണമായ ഒരു ഡാറ്റാ സെറ്റ് അവലോകനം ചെയ്യുക.
-
മറ്റൊരു സ്നാപ്പ്ഷോട്ടിനെക്കുറിച്ച് വിഷൻ സെൻസറിൽ നിന്ന് ശേഖരിച്ച വിവരങ്ങളുടെ ഒരു ഭാഗിക ഡാറ്റ സെറ്റ് പൂർത്തിയാക്കുക.
-
ഒരു സ്നാപ്പ്ഷോട്ടും വിഷൻ സെൻസറിന്റെ സെൻസിംഗ് ബ്ലോക്കുകളും അടിസ്ഥാനമാക്കി ഒരു ഡാറ്റ സെറ്റ് സൃഷ്ടിക്കുക.
വിഷൻ സെൻസറിന്റെ സെൻസിംഗ് ബ്ലോക്കുകൾ
VEXcode IQ-ൽ വിഷൻ സെൻസറിനായി സെൻസിംഗ് ബ്ലോക്കുകൾ ഉണ്ട്. ഒരു സ്നാപ്പ്ഷോട്ട് എടുക്കുന്നതിനും ഒബ്ജക്റ്റ് നിലവിലുണ്ടോ എന്ന് പരിശോധിക്കുന്നതിനും പ്ലേ വിഭാഗത്തിൽ നിങ്ങൾ ഇതിനകം ഉപയോഗിച്ച ആദ്യത്തെ രണ്ടെണ്ണം.
താഴെയുള്ള ചിത്രത്തിൽ, (സ്നാപ്പ്ഷോട്ട്) ബ്ലോക്ക് ഗ്രീൻബോക്സ് സ്നാപ്പ്ഷോട്ട് പകർത്തിയതായി നിങ്ങൾക്ക് കാണാം. സ്നാപ്പ്ഷോട്ടിൽ GREENBOX എന്ന വസ്തു തിരിച്ചറിഞ്ഞു, അതിനാൽ അത് നിലവിലുണ്ടോ എന്നതിന്റെ ഉത്തരം ശരിയാണ്.
ഈ മറ്റ് സെൻസിംഗ് ബ്ലോക്കുകളും അവയുടെ മൂല്യങ്ങൾ നമ്മോട് എന്താണ് പറയുന്നതെന്ന് നോക്കാം.
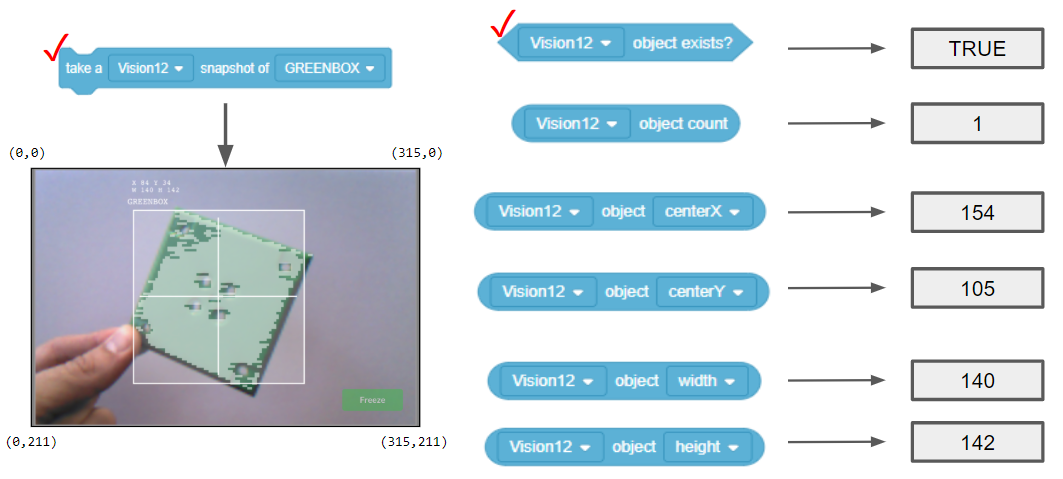
- സ്നാപ്പ്ഷോട്ടിൽ എത്ര GREENBOX ഒബ്ജക്റ്റുകൾ ഉണ്ടെന്ന് (ഒബ്ജക്റ്റ് എണ്ണം) ബ്ലോക്ക് നമ്മോട് പറയുന്നു. ഇവിടെ, 1 മാത്രമേ കണ്ടെത്തിയിട്ടുള്ളൂ.
- ഗ്രീൻബോക്സ് ഒബ്ജക്റ്റ് റോബോട്ടിന്റെ മധ്യബിന്ദുവിന്റെ ഇടത്താണോ വലത്താണോ എന്ന് മധ്യഭാഗത്തെ X മൂല്യം നമ്മോട് പറയുന്നു. ഓർക്കുക, വിഷൻ സെൻസർ റോബോട്ടിന്റെ മുൻവശത്തിന്റെ മധ്യത്തിലാണ് സ്ഥാപിച്ചിരിക്കുന്നത്, അതിനാൽ സ്നാപ്പ്ഷോട്ടിന്റെ കാഴ്ച റോബോട്ടിന്റെ കാഴ്ചയാണ്.
- മധ്യഭാഗം X 157.5 നേക്കാൾ വലുതാണെങ്കിൽ, വസ്തു റോബോട്ടിന്റെ മധ്യബിന്ദുവിന്റെ വലതുവശത്താണ്.
- മധ്യഭാഗം X 157.5 ൽ കുറവാണെങ്കിൽ, വസ്തു റോബോട്ടിന്റെ മധ്യബിന്ദുവിന്റെ ഇടതുവശത്തായിരിക്കും.
- ഗ്രീൻബോക്സ് റോബോട്ടിന്റെ മധ്യബിന്ദുവിനേക്കാൾ ഉയർന്നതാണോ താഴ്ന്നതാണോ എന്ന് മധ്യ Y മൂല്യം നമ്മോട് പറയുന്നു.
- കേന്ദ്രം Y 105.5 നേക്കാൾ വലുതാണെങ്കിൽ, വസ്തു റോബോട്ടിന്റെ കേന്ദ്രബിന്ദുവിനേക്കാൾ താഴെയാണ്.
- കേന്ദ്രം Y 105.5 ൽ കുറവാണെങ്കിൽ, വസ്തു റോബോട്ടിന്റെ കേന്ദ്രബിന്ദുവിനേക്കാൾ ഉയർന്നതാണ്.
- ഗ്രീൻബോക്സ് റോബോട്ടിനോട് എത്രത്തോളം അടുത്താണെന്ന് വീതിയും ഉയരവും നമ്മോട് പറയുന്നു.
- റോബോട്ടിനോട് അടുക്കുന്തോറും ഒരേ വലിപ്പമുള്ള വസ്തു വീതിയിലും ഉയരത്തിലും വലുതായിരിക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
എന്തിനാണ് ഈ വായന?
ടീച്ചർ ടൂൾബോക്സ്
-
എന്തിനാണ് ഈ വായന?
VEXcode IQ-യിലെ സഹായ വിവരങ്ങൾ ബ്ലോക്കുകളെക്കുറിച്ചുള്ള വിവരങ്ങളും നൽകുന്നു, എന്നാൽ ഇവിടെ, ശേഖരിക്കുന്ന ഡാറ്റ സ്നാപ്പ്ഷോട്ടിലെ ഒബ്ജക്റ്റിനെക്കുറിച്ച് ഉപയോക്താവിനോട് പ്രത്യേകമായി എന്താണ് പറയുന്നതെന്ന് സന്ദർഭോചിതമാക്കിയിരിക്കുന്നു.
കുറിപ്പുകൾ:
-
ഒബ്ജക്റ്റ് റോബോട്ടിന്റെ മധ്യബിന്ദുവിന്റെ ഇടത്തോട്ടോ/വലത്തോട്ടോ മുകളിലോ/താഴെയോ ആണോ എന്ന് നിർണ്ണയിക്കാൻ മുഴുവൻ സ്നാപ്പ്ഷോട്ടിന്റെയും centerX, centerY മൂല്യങ്ങൾ ഉപയോഗിക്കുന്നു. ആ അച്ചുതണ്ടിലെ ആകെ പിക്സലുകളുടെ എണ്ണം രണ്ടായി ഹരിച്ചാണ് അവ കണക്കാക്കുന്നത് (ഉദാഹരണത്തിന്, സ്നാപ്പ്ഷോട്ടിന്റെ centerX = 315 / 2 = 157.5).
റോബോട്ടിന്റെ മുൻവശത്തിന്റെ മധ്യഭാഗത്തും മുന്നോട്ട് അഭിമുഖമായും വിഷൻ സെൻസർ ഘടിപ്പിക്കേണ്ടതിനാൽ, റോബോട്ടിന്റെ മധ്യബിന്ദുവും വിഷൻ സെൻസറിന്റെ സ്നാപ്പ്ഷോട്ടിന്റെ മധ്യബിന്ദുവും ഒന്നുതന്നെയാണെന്ന് നമുക്ക് അനുമാനിക്കാം. റോബോട്ടിന്റെ (അല്ലെങ്കിൽ വിഷൻ സെൻസറിന്റെ) മധ്യബിന്ദുവുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ വസ്തുവിന്റെ സ്ഥാനം വിലയിരുത്തുമ്പോൾ, റോബോട്ടിന്റെ നിർമ്മാണത്തിലെ വിഷൻ സെൻസറിന്റെ സ്ഥാനവും വിഷൻ സെൻസർ എത്രത്തോളം താഴേക്ക് കോണാകുമെന്ന് കണക്കിലെടുക്കേണ്ടതുണ്ട്.
-
സ്നാപ്പ്ഷോട്ടിനുള്ളിൽ Y മൂല്യങ്ങൾ താഴേക്ക് വർദ്ധിക്കുന്നു. അടുത്ത ഭാഗത്തേക്ക് പോകുന്നതിനുമുമ്പ് വിദ്യാർത്ഥികൾ അത് തിരിച്ചറിഞ്ഞുവെന്ന് ഉറപ്പാക്കുക.
മധ്യ X, മധ്യ Y മൂല്യങ്ങൾ എങ്ങനെയാണ് കണക്കാക്കുന്നത്?
സ്നാപ്പ്ഷോട്ടിനുള്ളിലെ കോർഡിനേറ്റുകളെ അടിസ്ഥാനമാക്കിയാണ് മൂല്യങ്ങൾ കണക്കാക്കുന്നത്. വസ്തുവിന്റെ വീതിയും ഉയരവും ഇതിനകം കണക്കാക്കിയിട്ടുണ്ട്.
വിഷൻ സെൻസർ വസ്തുവിന്റെ മുകളിൽ ഇടത് കോണിലുള്ള X, Y മൂല്യങ്ങൾ ട്രാക്ക് ചെയ്യുന്നു. താഴെ, ആ നിർദ്ദേശാങ്കങ്ങൾ (84, 34) ആണ്.

മുകളിലെ ഇടത് കോണിലെ (84, 34) നിർദ്ദേശാങ്കങ്ങളും നൽകിയിരിക്കുന്ന വീതി (W 140), ഉയരം (H 142) എന്നീ മൂല്യങ്ങളും അടിസ്ഥാനമാക്കി മധ്യ X, മധ്യ Y മൂല്യങ്ങൾ കണക്കാക്കാം.

- സെന്റർ എക്സ് = 140/2 + 84 = 154
- centerX = വസ്തുവിന്റെ ഇടതുവശത്തെ X കോർഡിനേറ്റിലേക്ക് ചേർത്തതിന്റെ പകുതി വീതി.
- കേന്ദ്രം വൈ = 142/2 + 34 = 105
- centerY = വസ്തുവിന്റെ ഏറ്റവും മുകളിലുള്ള Y കോർഡിനേറ്റിലേക്ക് ചേർക്കുന്ന ഉയരത്തിന്റെ പകുതി.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഈ പേജ് അവസാനിപ്പിക്കുന്നു
ടീച്ചർ ടൂൾബോക്സ്
-
ഈ പേജ് അവസാനിപ്പിക്കുന്നു
മധ്യഭാഗം X ഉം മധ്യഭാഗം Y ഉം മൂല്യങ്ങൾ കണ്ടെത്തുന്നതിൽ ഉൾപ്പെട്ടിരിക്കുന്ന ഗണിതശാസ്ത്രം വിദ്യാർത്ഥികൾ മനസ്സിലാക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക. അടുത്ത പേജിലെ പ്രവർത്തനത്തിന് അവർക്ക് അത് ആവശ്യമായി വരും.
(84, 34), (W 140, H 142) എന്നീ മൂല്യങ്ങൾ സ്നാപ്പ്ഷോട്ടിന്റെ മൂലകളിൽ നൽകിയിരിക്കുന്ന കോർഡിനേറ്റുകളുമായി എങ്ങനെ ബന്ധപ്പെട്ടിരിക്കുന്നുവെന്ന് ചോദിക്കുക. പിക്സലുകളുടെ എണ്ണത്തെ അടിസ്ഥാനമാക്കി മുഴുവൻ സ്നാപ്പ്ഷോട്ടും ഒരു കോർഡിനേറ്റ് തലത്തിലേക്ക് മാപ്പ് ചെയ്തിട്ടുണ്ടെന്ന് വിദ്യാർത്ഥികൾ തിരിച്ചറിയണം. X മൂല്യങ്ങൾ 0 മുതൽ 315 വരെ (316 പിക്സൽ വീതി) Y മൂല്യങ്ങൾ 0 മുതൽ 211 വരെ (212 പിക്സൽ ഉയരം) വ്യത്യാസപ്പെടുന്നു. ഒരു വസ്തുവിന്റെ കോർഡിനേറ്റുകളും വലുപ്പവും ആ അക്ഷങ്ങളിലൂടെ എത്ര പിക്സലുകൾ എടുക്കുന്നു എന്നതിനെ അടിസ്ഥാനമാക്കിയുള്ളതാണ്.