
Förderband-Akkumulatoren
Ein Förderbandspeicher verwendet eine Art Band, um die Objekte zu manipulieren, auch nachdem sie im Roboter gesammelt wurden. Förderbänder sind eine Art Reibungsgreifer, da sie darauf angewiesen sind, dass sich die Reibung zwischen dem Band und dem Objekt ansammelt.
Es ist wichtig zu beachten, dass es zwei Haupttypen von Förderbändern gibt: Indexierbänder, bei denen das Band nur beim Greifen eines Objekts läuft, um eine gute Sortierung zu ermöglichen, und Nichtindexierbänder, bei denen das Band kontinuierlich läuft und die Objekte selbst sortiert werden.
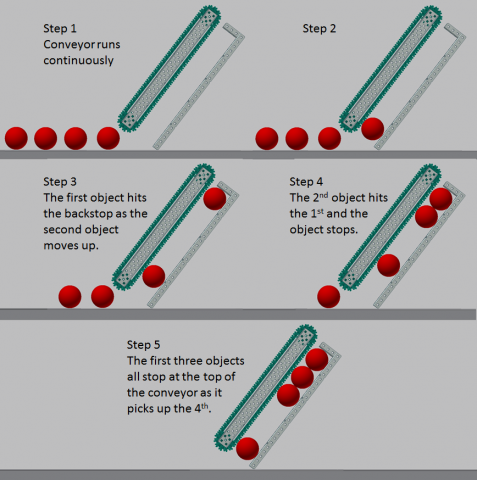
Ein nicht indexierendes Förderband, wie oben gezeigt, läuft kontinuierlich. Wenn das erste Objekt gegriffen wird, bewegt es sich an die Oberseite des Bandes, bis es auf die Rückseite des Akkumulators trifft, wo es gegen einen Anschlag stößt und die Bänder daran vorbeigleiten. Wenn ein zweites Objekt gegriffen wird, bewegt es sich nach oben, bis es das erste trifft, und stoppt (an diesem Punkt gleitet das Band nun an diesen beiden stationären Objekten vorbei).