
Acumuladores de cinta transportadora
Un acumulador de cinta transportadora utiliza algún tipo de cinta para manipular los objetos incluso después de que hayan sido recogidos en el robot. Las cintas transportadoras son un tipo de agarradores de fricción, ya que dependen de la fricción entre la cinta y el objeto para acumularse.
Es importante tener en cuenta que hay dos tipos principales de cintas transportadoras: cintas de indexación, en las que la cinta se desplaza solo al agarrar un objeto para permitir una buena clasificación, y cintas no indexadoras en las que la cinta se desplaza continuamente y los objetos se autoclasifican.
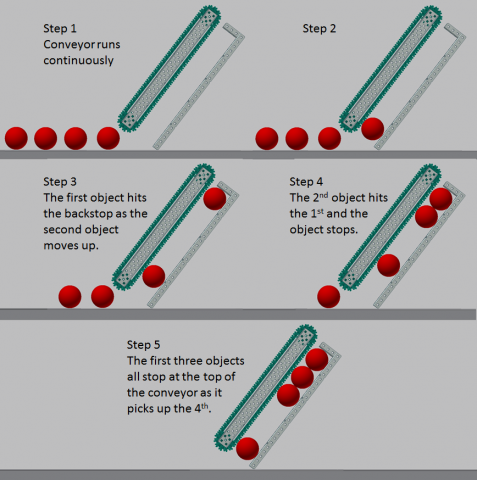
Una cinta transportadora no indexable como se muestra arriba funciona continuamente. Cuando se agarra el primer objeto, se mueve a la parte superior de la cinta hasta que golpea la parte posterior del acumulador, donde golpea un tope y las cintas se deslizan más allá de él. Cuando se agarra un segundo objeto, se mueve hacia arriba hasta que golpea el primero y se detiene (en ese momento el cinturón ahora se desliza más allá de estos dos objetos estacionarios).