
Accumulatori a Nastro Trasportatore
Un accumulatore a nastro trasportatore utilizza una sorta di nastro per manipolare gli oggetti anche dopo che sono stati raccolti nel robot. I nastri trasportatori sono un tipo di pinze frizionali poiché si basano sull'attrito tra il nastro e l'oggetto da accumulare.
È importante notare che esistono due tipi principali di nastri trasportatori: i nastri indicizzatori, in cui il nastro funziona solo quando si afferra un oggetto per consentire una buona cernita, e i nastri non indicizzatori in cui il nastro funziona continuamente e gli oggetti si autoassortiscono.
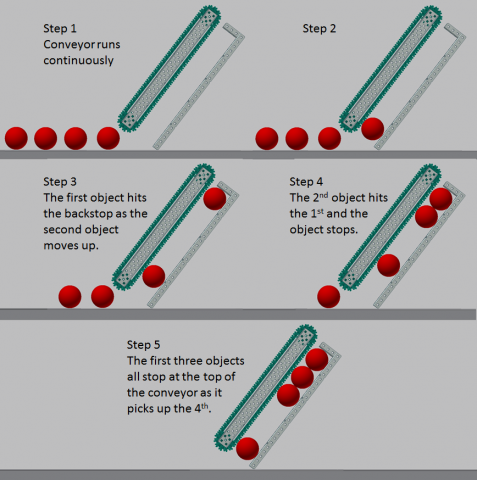
Un nastro trasportatore non indicizzato come mostrato sopra funziona continuamente. Quando il primo oggetto viene afferrato, si sposta verso la parte superiore del nastro fino a colpire la parte posteriore dell'accumulatore dove colpisce un arresto e le cinghie scivolano oltre di esso. Quando un secondo oggetto viene afferrato, si muove verso l'alto fino a colpire il primo e si ferma (a quel punto il nastro ora scivola oltre entrambi questi oggetti fissi).