
En esta lección, aprenderás a planificar un proyecto dividiendo una tarea en los comportamientos más pequeños posibles necesarios para completarla. Una vez que hayas desglosado la tarea, podrás adjuntar código a cada uno de los comportamientos enumerados en el plan a medida que construyes y pruebas un proyecto. También aprenderá a documentar un plan en su cuaderno de ingeniería como referencia para resolver problemas futuros.
Practicarás estas habilidades por ti mismo en la Actividad al final de esta
Lección. 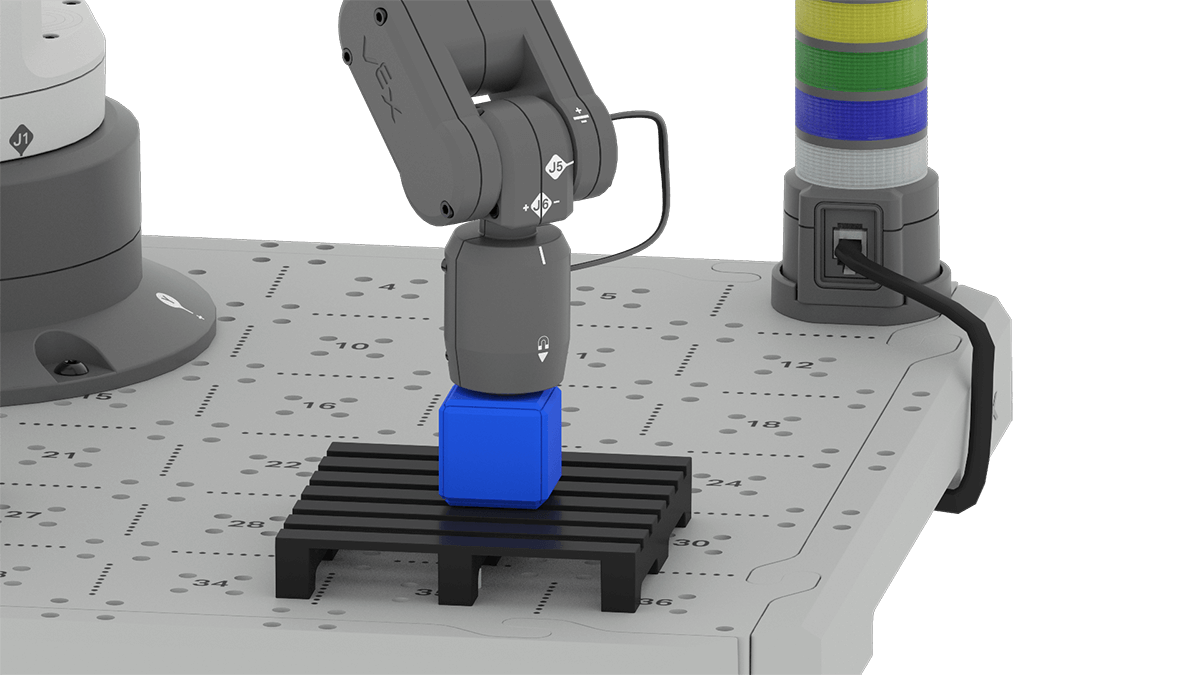
Hacer un plan
Mire el video a continuación para aprender cómo hacer un plan efectivo para realizar una tarea con el brazo robótico de 6 ejes. Este video utiliza un problema familiar que ya ha resuelto (mover un cubo al palé) como vehículo para explicar el proceso de planificación.
En el vídeo, has aprendido cómo hacer un plan al codificar el brazo de 6 ejes para completar una tarea. Aprendiste a identificar el objetivo de tu plan y luego a establecer los pasos necesarios para completar la tarea. Luego aprendiste a descomponer esos pasos en los comportamientos más pequeños posibles que el brazo de 6 ejes puede completar. Desglosaste los pasos hasta llegar al nivel de bloque individual, donde un solo bloque VEXcode corresponde al comportamiento necesario. Y aprendiste a registrar este proceso en tu cuaderno de ingeniería.
| Mueva un cubo a la zona de carga a un palé |
| 1. Tome un cubo. |
| a. Coloque el efector final del brazo de 6 ejes en el imán. |
| b. Mueva el brazo de 6 ejes al cubo en la zona de carga. |
| c. Conecte el cubo al imán. |
| d. Mueva el brazo de 6 ejes por encima de la zona de carga. |
| 2. Coloque el cubo en el palé. |
| a. Mueva el brazo de 6 ejes por encima del palé. |
| b. Mueva el brazo de 6 ejes hacia abajo para colocar el cubo en el palé. |
| c. Suelte el cubo del imán. |
| d. Mueva el brazo de 6 ejes por encima del palé. |
A continuación, aprenderá a implementar el plan que hizo, construyendo su proyecto en VEXcode.
Implementación de un plan
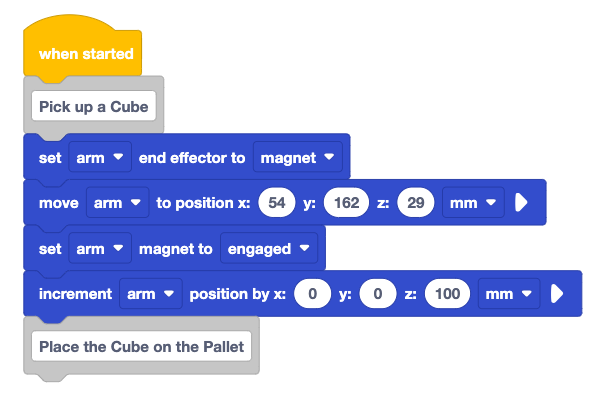
Una vez que haya creado y documentado su plan, construir y probar un proyecto se vuelve mucho más eficiente. En el siguiente vídeo, verás cómo implementar parte del plan para construir un proyecto VEXcode exitoso.
En el video, aprendiste a adjuntar un bloque VEXcode a cada comportamiento que documentaste en tu plan y luego a ingresar los parámetros necesarios. Aprendiste la importancia de probar cada comportamiento a medida que construyes tu proyecto, para que puedas realizar los cambios necesarios en tu código de forma incremental, en lugar de esperar hasta que se construya todo el proyecto. Esto guió a través de la creación y prueba de la primera sección del plan para recoger un cubo de la zona de carga.
Actividad
Ahora que ha aprendido cómo hacer e implementar un plan, es hora de practicar estas habilidades. En esta Actividad, registrará un plan para mover un Cubo de la Zona de Carga al palé y luego implementará su plan en VEXcode.
Actividad: Planificar e implementar un proyecto para que el Brazo de 6 Ejes recoja un Cubo de la Zona de Carga, y lo coloque sobre un palet.
- Con su grupo, haga un plan para mover el Cubo de la Zona de Carga al palé y regístrelo en su cuaderno de ingeniería. Asegúrese de descomponer la tarea en los comportamientos más pequeños posibles. Puede usar el plan de ejemplo del video como referencia.
- Revise su plan con su maestro.
- Implementar el plan construyendo y probando el proyecto de forma incremental.
- Asegúrate de construir el proyecto un comportamiento a la vez, probando con frecuencia a medida que construyes.
- Realice los cambios necesarios en su proyecto a medida que avanza.
- Una vez que haya implementado con éxito el plan y construido su proyecto, documéntelo en su cuaderno de ingeniería.
- Nombra y guarda tu proyecto.
Comprueba tu comprensión
Antes de pasar a la siguiente lección, asegúrate de comprender los conceptos de esta lección respondiendo las siguientes preguntas en tu cuaderno de ingeniería.
Verifique sus preguntas de comprensión > (Google Doc / .docx / .pdf)
Seleccione Siguiente > para pasar a la Lección 2.