
Les 1: Een project plannen
In deze les leert u hoe u een project plant door een taak op te delen in de kleinst mogelijke gedragingen die nodig zijn om de taak te voltooien. Zodra u de taak hebt opgesplitst, kunt u code koppelen aan elk van de gedragingen die in het plan staan vermeld terwijl u een project bouwt en test. U leert ook hoe u een plan in uw technisch notitieboekje kunt vastleggen, zodat u het kunt gebruiken bij het oplossen van toekomstige problemen.
U oefent deze vaardigheden zelf in de activiteit aan het einde van deze les. 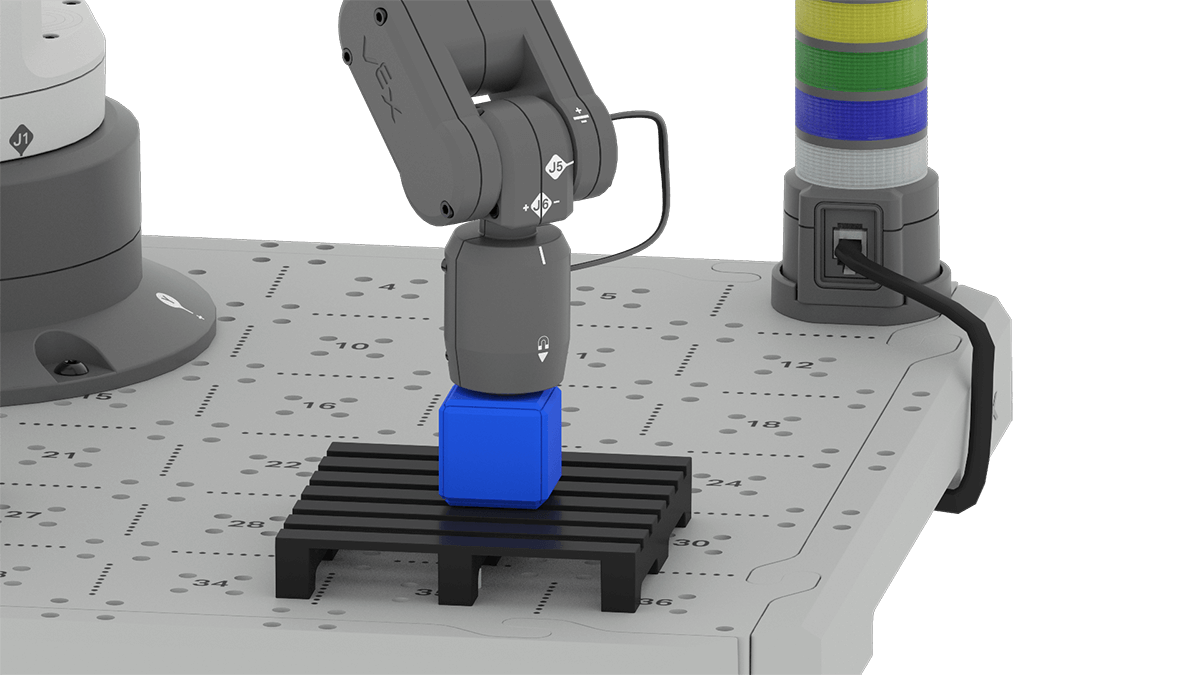
Een plan maken
Bekijk de onderstaande video om te leren hoe u een effectief plan maakt om een taak uit te voeren met de 6-assige robotarm. In deze video wordt een bekend probleem dat u al hebt opgelost (het verplaatsen van een Cube naar de pallet) gebruikt als hulpmiddel om het planningsproces uit te leggen.
In de video heb je geleerd hoe je een plan kunt maken bij het coderen van de 6-assige arm om een taak te voltooien. Je hebt geleerd om het doel van je plan te identificeren en vervolgens de stappen vast te stellen die nodig zijn om de taak te voltooien. Vervolgens heb je geleerd om die stappen op te splitsen in het kleinst mogelijke gedrag dat de 6-assige arm kan voltooien. Je hebt de stappen afgebroken totdat je het individuele blokniveau hebt bereikt, waar een enkel VEXcode-blok overeenkomt met het benodigde gedrag. En je hebt geleerd om dit proces vast te leggen in je engineering notebook.
| Verplaats een kubus naar de laadzone naar een pallet |
| 1. Pak een kubus. |
| a. Zet de eindeffector van de 6-assige arm op Magnet. |
| b. Verplaats de 6-assige arm naar de kubus in de laadzone. |
| c. Bevestig de kubus aan de magneet. |
| d. Verplaats de 6-assige arm boven de laadzone. |
| 2. Plaats de Cube op de pallet. |
| a. Verplaats de 6-assige arm boven de pallet. |
| b. Verplaats de 6-assige arm naar beneden om de kubus op de pallet te plaatsen. |
| c. Maak de kubus los van de magneet. |
| d. Verplaats de 6-assige arm boven de pallet. |
Vervolgens leert u het door u gemaakte plan uit te voeren, door uw project in VEXcode te bouwen.
Een plan implementeren
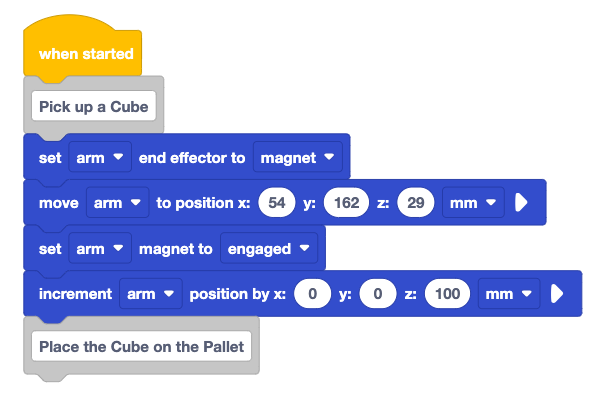
Zodra u uw plan hebt gemaakt en gedocumenteerd, wordt het bouwen en testen van een project veel efficiënter. In de volgende video ziet u hoe u een deel van het plan kunt implementeren om een succesvol VEXcode-project te bouwen.
In de video hebt u geleerd hoe u een VEXcode-blok koppelt aan elk gedrag dat u in uw plan hebt gedocumenteerd en vervolgens de benodigde parameters invoert. Je hebt geleerd hoe belangrijk het is om elk gedrag te testen terwijl je je project bouwt, zodat je de nodige wijzigingen in je code stapsgewijs kunt aanbrengen, in plaats van te wachten tot het hele project is gebouwd. Dit liep door het maken en testen van het eerste deel van het plan om een kubus uit de laadzone op te halen.
Activiteit
Nu je hebt geleerd hoe je een plan maakt en implementeert, is het tijd om deze vaardigheden te oefenen. In deze activiteit legt u een plan vast om een kubus van de laadzone naar de pallet te verplaatsen en implementeert u vervolgens uw plan in VEXcode.
Activiteit: Plan en implementeer een project voor de 6-assige arm om een kubus uit de laadzone op te pakken en op een pallet te plaatsen.
- Maak met je groep een plan om de kubus van de laadzone naar de pallet te verplaatsen en op te nemen in je technische notitieboekje. Zorg ervoor dat je de taak in het kleinst mogelijke gedrag uiteenzet. Je kunt het voorbeeldplan uit de video gebruiken als referentie.
- Bekijk je plan met je leraar.
- Implementeer het plan door het project stapsgewijs op te bouwen en te testen.
- Zorg ervoor dat u het project één gedrag tegelijk opbouwt en regelmatig test terwijl u bouwt.
- Breng onderweg de nodige wijzigingen aan in je project.
- Zodra u het plan met succes hebt geïmplementeerd en uw project hebt gebouwd, documenteert u het in uw technische notitieblok.
- Geef uw project een naam en sla het op.
Controleer uw begrip
Voordat u doorgaat naar de volgende les, moet u ervoor zorgen dat u de concepten in deze les begrijpt door de volgende vragen in uw technische notitieboek te beantwoorden.
Check Your Understanding vragen > (Google Doc / .docx / .pdf)
Selecteer Volgende > om door te gaan naar les 2.