
수업 1: 프로젝트 계획
이 수업에서는 작업을 완료하는 데 필요한 가장 작은 행동으로 나누어 프로젝트를 계획하는 방법을 배웁니다. 작업을 세분화하면 프로젝트를 빌드하고 테스트할 때 계획에 나열된 각 동작에 코드를 첨부할 수 있습니다. 또한, 향후 문제를 해결할 때 참고할 수 있도록 엔지니어링 노트북에 계획을 문서화하는 방법도 배웁니다.
이 수업의 마지막에 있는 활동에서 여러분은 이러한 기술을 직접 연습하게 될 것입니다. 
계획 세우기
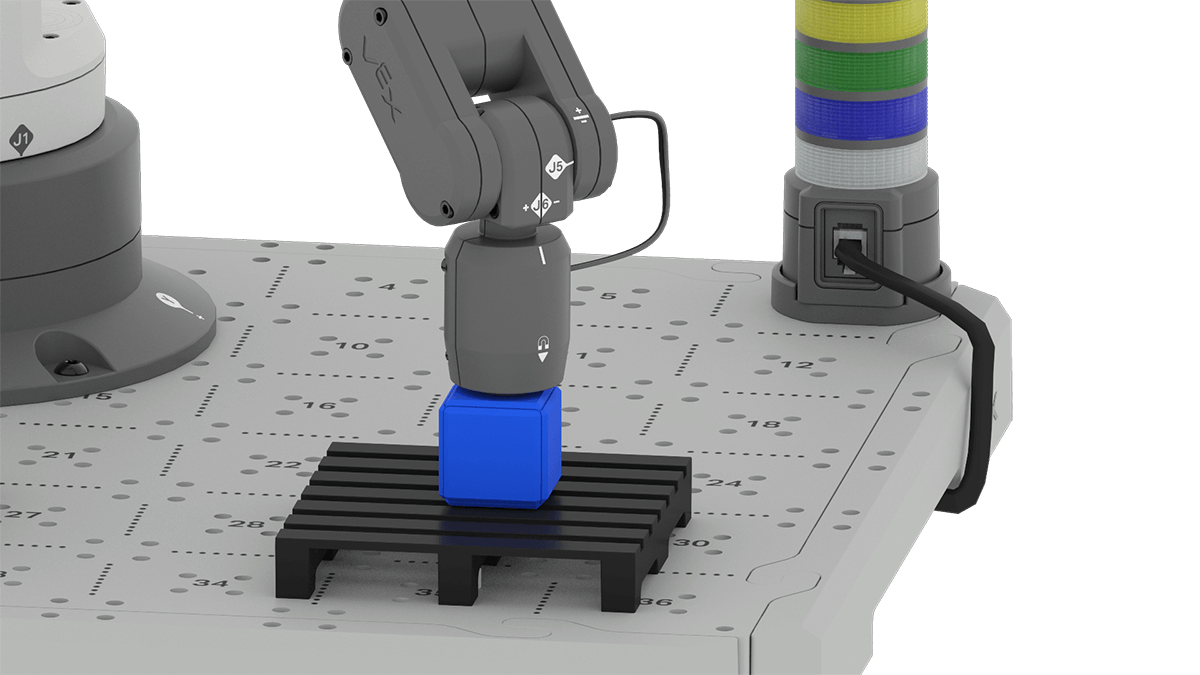
6축 로봇팔을 사용하여 작업을 완료하기 위한 효과적인 계획을 세우는 방법에 대해 알아보려면 아래 영상을 시청하세요. 이 영상에서는 여러분이 이미 해결한 친숙한 문제(큐브를 팔레트로 옮기는 문제)를 수단으로 사용하여 계획 과정을 설명합니다.
이 동영상에서는 작업을 완료하기 위해 6축 암을 코딩할 때 계획을 세우는 방법을 배웠습니다. 계획의 목표를 파악하고 작업 완료와 관련된 단계를 수립하는 방법을 배웠습니다. 그런 다음 이러한 단계를 6축 암이 완료할 수 있는 가장 작은 동작으로 분해하는 방법을 배웠습니다. 개별 블록 수준에 도달할 때까지 단계를 세분화했습니다. 여기서 단일 VEXcode 블록은 필요한 동작에 해당합니다. 그리고 이 프로세스를 엔지니어링 노트에 기록하는 방법을 배웠습니다.
| 큐브를 로딩 영역으로 이동하여 팔레트로 이동 |
| 1. 큐브를 집으십시오. |
| a. 6축 암의 엔드 이펙터를 자석으로 설정합니다. |
| b. 6축 암을 로딩 영역의 큐브로 이동합니다. |
| c. 큐브를 자석에 부착합니다. |
| d. 6축 암을 적재 구역 위로 이동합니다. |
| 2. 팔레트에 큐브를 놓습니다. |
| a. 팔레트 위로 6축 암을 이동합니다. |
| b. 6축 암을 아래로 움직여 팔레트에 큐브를 놓습니다. |
| c. 자석에서 큐브를 놓습니다. |
| d. 팔레트 위로 6축 암을 이동합니다. |
다음으로 VEXcode에서 프로젝트를 구축하여 작성한 계획을 구현하는 방법을 배우게 됩니다.
계획 실행하기
계획을 만들고 문서화하면 프로젝트를 구축하고 테스트하는 것이 훨씬 더 효율적입니다. 다음 비디오에서는 성공적인 VEXcode 프로젝트를 구축하기 위한 계획의 일부를 구현하는 방법을 볼 수 있습니다.
이 비디오에서는 계획에 기록한 각 동작에 VEXcode 블록을 첨부한 다음 필요한 매개 변수를 입력하는 방법을 배웠습니다. 프로젝트를 빌드할 때 각 동작을 테스트하는 것의 중요성을 배웠으므로 전체 프로젝트가 빌드될 때까지 기다리는 대신 코드를 점진적으로 변경할 수 있습니다. 이것은 로딩 영역에서 큐브를 픽업하기 위한 계획의 첫 번째 섹션의 생성 및 테스트를 거쳤습니다.

활동
계획을 세우고 실행하는 방법을 배웠으니 이제 이러한 기술을 연습할 차례입니다. 이 활동에서 큐브를 로딩 영역에서 팔레트로 이동하는 계획을 기록한 다음 VEXcode에서 계획을 구현합니다.
활동: 6축 암이 로딩 영역에서 큐브를 픽업하여 팔레트에 배치하는 프로젝트를 계획하고 구현합니다.
- 그룹과 함께 큐브를 로딩 영역에서 팔레트로 이동하여 엔지니어링 노트에 기록할 계획을 세우십시오. 가능한 한 가장 작은 행동으로 작업을 분해해야 합니다. 비디오의 예제 계획을 참조용으로 사용할 수 있습니다.
- 선생님과 함께 계획을 검토하세요.
- 프로젝트를 점진적으로 구축하고 테스트하여 계획을 구현합니다.
- 프로젝트를 빌드할 때 자주 테스트하면서 한 번에 하나의 동작을 빌드해야 합니다.
- 프로젝트를 진행하면서 필요한 사항을 변경하세요.
- 계획을 성공적으로 구현하고 프로젝트를 구축한 후 엔지니어링 노트에 문서화하십시오.
- 프로젝트 이름을 지정하고 저장합니다.
이해도 확인하기
다음 수업으로 넘어가기 전에 공학 공책에 있는 다음 질문에 답하여 이 수업의 개념을 이해했는지 확인한다.
이해하기 질문 확인하기 > (Google Doc / .docx / .pdf)
다음 > 을 선택하여 2단원으로 넘어갑니다.