
Leçon 3 : Ramasser et déplacer des disques
Dans la leçon précédente, vous avez utilisé le bloc [Energize Electromagnet] et les blocs de transmission pour ramasser et déplacer des disques sur le terrain de jeu Disk Mover avec le robot VR. Cette leçon résoudra le même problème en utilisant les commentaires des capteurs et les blocs [Répéter jusqu'à].
Résultats d'apprentissage
- Identifiez comment utiliser le bloc [Répéter jusqu'à] dans un projet.
- Identifiez que le <Eye Sensor near object> bloc signale si le capteur oculaire est suffisamment proche d'un objet pour détecter une couleur.
- Identifiez que la commande [Turn to heading] transforme un groupe motopropulseur en un cap spécifique, à l'aide du capteur gyroscopique.
- Identifiez que la commande [Turn to heading] déterminera la direction dans laquelle tourner en fonction du cap actuel du capteur gyroscopique.
- Expliquez pourquoi une commande [Turn to heading] serait utilisée au lieu d'une commande [Turn] ou [Turn for].
Pourquoi utiliser des capteurs ?
Dans la leçon 2, le robot VR a parcouru une distance spécifiée en utilisant le bloc [Drive for] pour ramasser et déplacer un disque bleu vers l'objectif. La distance entre le robot VR et le premier disque bleu a été estimée et vérifiée à l'aide des dimensions des carrés de la grille sur le terrain de jeu Disk Mover. Bien que cela ait résolu le défi, il y a beaucoup de place pour l'erreur en dupliquant le processus pour ramasser plusieurs disques à différentes distances, ce qui est nécessaire pour résoudre le défi du déménageur de disques à la fin de cette unité. L'utilisation de la rétroaction des capteurs est un moyen plus efficace de résoudre ce problème, tout en optimisant le projet en utilisant moins de blocs.
Que se passe-t-il si le robot de réalité virtuelle entre en collision avec un disque et dévie de sa trajectoire ? Que se passe-t-il si les disques se trouvent à des endroits légèrement différents de l'objectif ? Les commentaires des capteurs peuvent être utilisés pour ramasser et déplacer avec précision les disques sans connaître leur emplacement exact sur le terrain de jeu Disk Mover.
Les étapes pour résoudre le défi peuvent être utilisées pour déterminer les capteurs à utiliser dans le projet.
-
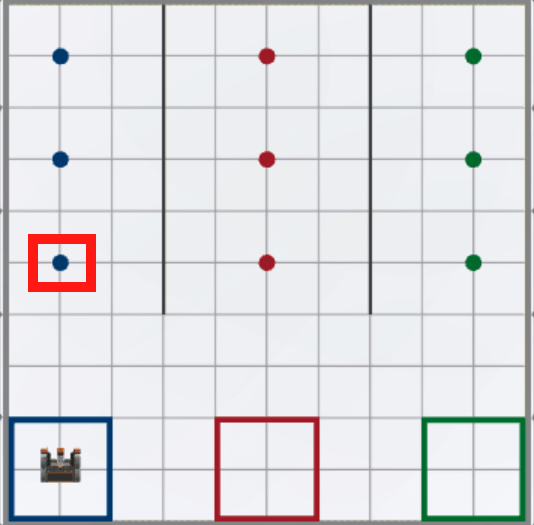
Tout d'abord : le robot VR se dirigera vers le premier disque bleu.
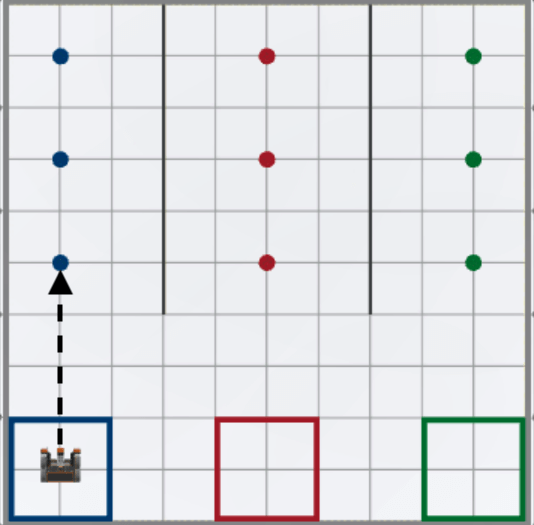
-
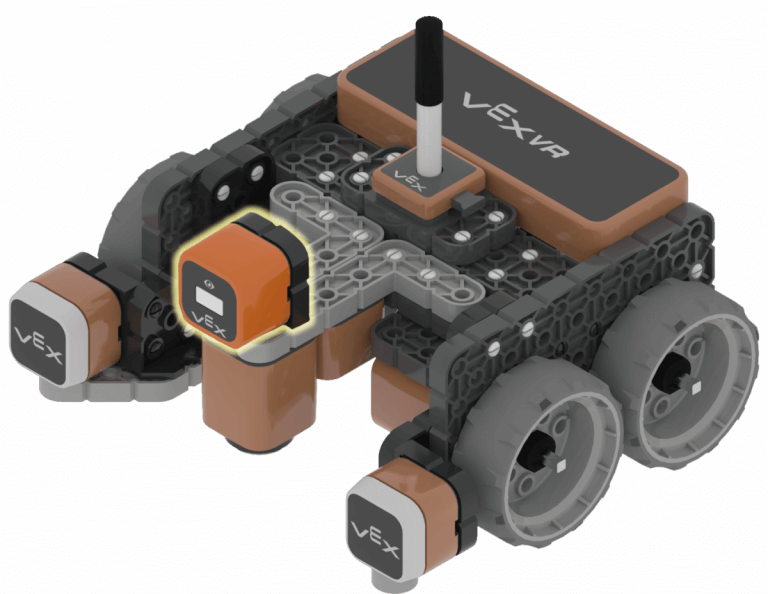
Les disques sont sur le sol de l'aire de jeux. Pour déterminer l'emplacement d'un disque, le capteur Down Eye peut être utilisé avec le <Eye Sensor near object> bloc.

-
-
Deuxièmement : le robot VR prendra le premier disque bleu.

-
Troisièmement : Le robot VR retournera à l'objectif bleu.
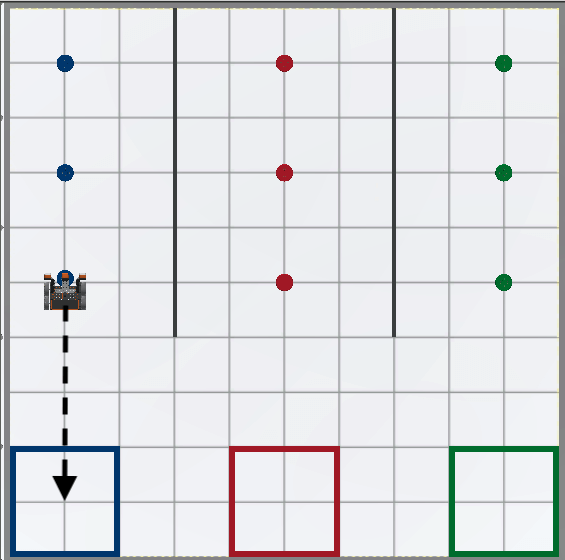
-
En revenant à l'objectif bleu, le robot VR utilisera le capteur de distance pour déterminer quand arrêter de conduire. Le capteur de distance peut être utilisé pour déterminer la distance entre l'avant du robot VR et le mur de l'aire de jeux.
-
-
Enfin : Le robot VR laissera tomber le disque bleu dans l'objectif bleu.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.