
บทที่ 3: การหยิบและการเคลื่อนย้ายดิสก์
ในบทเรียนก่อนหน้านี้คุณใช้บล็อก [Energize Electromagnet] และบล็อก Drivetrain เพื่อรับและย้ายดิสก์บน Disk Mover Playground ด้วยหุ่นยนต์ VR บทเรียนนี้จะแก้ปัญหาความท้าทายเดียวกันโดยใช้การรายงานข้อเสนอแนะของเซ็นเซอร์และ [ทำซ้ำจนกว่าจะ] บล็อก
ผลการเรียนรู้
- ระบุวิธีใช้บล็อค [ทำซ้ำจนกว่า] ในโปรเจกต์
- ระบุว่า <Eye Sensor near object> บล็อกรายงานว่าเซ็นเซอร์ตาอยู่ใกล้กับวัตถุเพื่อตรวจจับสีหรือไม่ Identify that the block reports if the Eye Sensor is close enough to an object to detect a color.
- ระบุว่าคำสั่ง [Turn to heading] จะเปลี่ยนระบบขับเคลื่อนไปยังหัวข้อเฉพาะโดยใช้เซ็นเซอร์ Gyro
- ระบุว่าคำสั่ง [Turn to heading] จะกำหนดทิศทางที่จะหันไปตามหัวเรื่องปัจจุบันของเซ็นเซอร์ Gyro
- อธิบายว่าเหตุใดจึงต้องใช้คำสั่ง [Turn to heading] แทนคำสั่ง [Turn] หรือ [Turn for]
ทำไมต้องใช้เซ็นเซอร์?
ในบทที่ 2 หุ่นยนต์ VR ขับไปตามระยะทางที่กำหนดโดยใช้บล็อก [Drive for] เพื่อรับและย้ายดิสก์สีน้ำเงินกลับไปที่เป้าหมาย ระยะห่างระหว่าง VR Robot และดิสก์สีน้ำเงินตัวแรกถูกประเมินและตรวจสอบโดยใช้ขนาดของสี่เหลี่ยมตารางบน Disk MoverPlayground แม้ว่าสิ่งนี้จะแก้ปัญหาได้แต่ก็มีช่องว่างมากสำหรับข้อผิดพลาดในการทำซ้ำกระบวนการรับดิสก์หลายตัวในระยะทางต่างๆซึ่งจำเป็นในการแก้ปัญหา Disk Mover Challenge ในตอนท้ายของหน่วยนี้ การใช้ข้อเสนอแนะจากเซ็นเซอร์ที่รายงานเป็นวิธีที่มีประสิทธิภาพมากขึ้นในการแก้ปัญหาความท้าทายนี้ในขณะที่ยังเพิ่มประสิทธิภาพโครงการโดยใช้บล็อกน้อยลง
จะเกิดอะไรขึ้นหากหุ่นยนต์ VR ชนกับดิสก์และถูกชนออกนอกเส้นทาง? จะเกิดอะไรขึ้นหากดิสก์อยู่ในตำแหน่งที่แตกต่างจากเป้าหมายเล็กน้อย? ข้อเสนอแนะจากเซ็นเซอร์สามารถใช้เพื่อรับและย้ายดิสก์ได้อย่างแม่นยำโดยไม่ทราบตำแหน่งที่แน่นอนบน Disk MoverPlayground
ขั้นตอนในการแก้ปัญหาสามารถนำมาใช้เพื่อกำหนดว่าจะใช้เซ็นเซอร์ใดในโครงการ
-
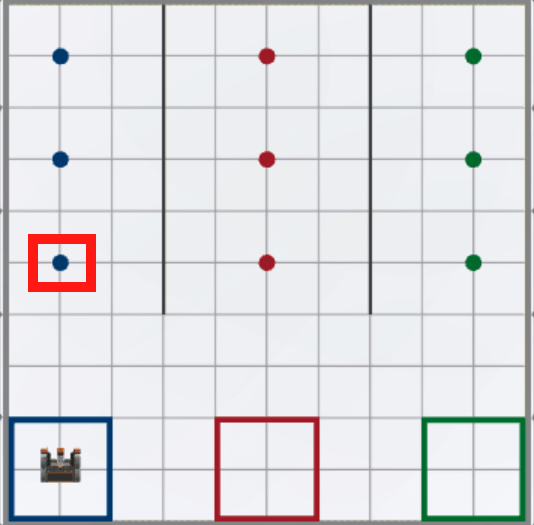
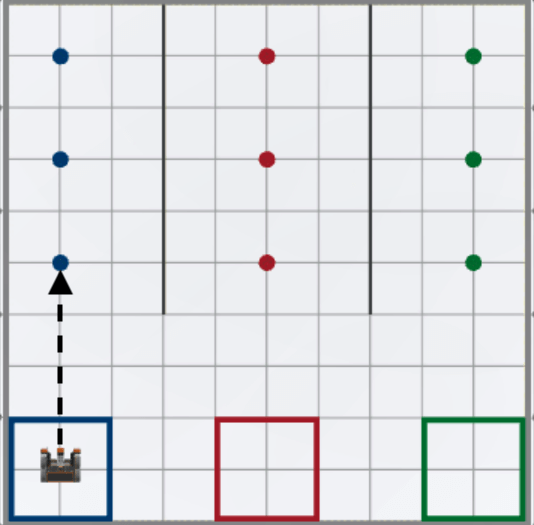
ประการแรก: หุ่นยนต์ VR จะขับไปยังดิสก์สีน้ำเงินตัวแรก
-
ดิสก์อยู่บนพื้นสนามเด็กเล่น ในการกำหนดตำแหน่งของดิสก์เซ็นเซอร์ดวงตาลงสามารถใช้กับ <Eye Sensor near object> บล็อกได้

-
-
ประการที่สอง: หุ่นยนต์ VR จะหยิบดิสก์สีฟ้าอันแรกขึ้นมา

-
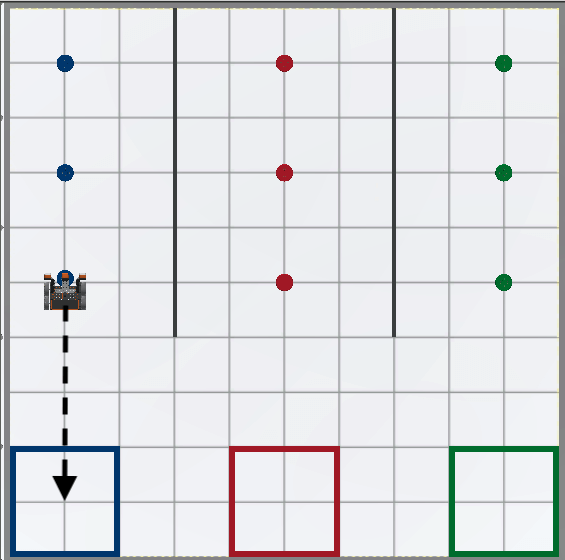
ประการที่สาม: หุ่นยนต์ VR จะขับรถกลับไปที่เป้าหมายสีน้ำเงิน
-
ในขณะที่ขับรถกลับไปที่เป้าหมายสีน้ำเงินหุ่นยนต์ VR จะใช้เซ็นเซอร์ระยะทางเพื่อกำหนดเวลาที่จะหยุดการขับขี่ เซ็นเซอร์ระยะทางสามารถใช้เพื่อกำหนดว่าด้านหน้าของหุ่นยนต์ VR อยู่ห่างจากผนังของสนามเด็กเล่นเท่าใด
-
-
สุดท้าย: หุ่นยนต์ VR จะวางดิสก์สีน้ำเงินลงในเป้าหมายสีน้ำเงิน

เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป