
পাঠ ৩: ডিস্ক তোলা এবং সরানো
আগের পাঠে, আপনি VR রোবট ব্যবহার করে ডিস্ক মুভার প্লেগ্রাউন্ড এ ডিস্কগুলি তুলে নেওয়ার এবং সরানোর জন্য [Energize Electromagnet] ব্লক এবং ড্রাইভট্রেন ব্লক ব্যবহার করেছিলেন। এই পাঠটি রিপোর্ট করা সেন্সর প্রতিক্রিয়া এবং [পুনরাবৃত্তি না হওয়া পর্যন্ত] ব্লক ব্যবহার করে একই চ্যালেঞ্জ সমাধান করবে।
শেখার ফলাফল
- একটি প্রকল্পে [Repeat until] ব্লকটি কীভাবে ব্যবহার করবেন তা চিহ্নিত করুন।
- শনাক্ত করুন যে <Eye Sensor near object> ব্লকটি রিপোর্ট করে যে আই সেন্সরটি কোনও বস্তুর এত কাছে আছে যে রঙ সনাক্ত করতে পারে।
- [Turn to heading] কমান্ডটি Gyro সেন্সর ব্যবহার করে একটি ড্রাইভট্রেনকে একটি নির্দিষ্ট শিরোনামে পরিণত করে কিনা তা চিহ্নিত করুন।
- [Turn to heading] কমান্ডটি Gyro সেন্সরের বর্তমান শিরোনামের উপর ভিত্তি করে কোন দিকে ঘুরতে হবে তা নির্ধারণ করবে তা চিহ্নিত করুন।
- [Turn] অথবা [Turn for] কমান্ডের পরিবর্তে [Turn to heading] কমান্ড কেন ব্যবহার করা হবে তা ব্যাখ্যা করো।
কেন সেন্সর ব্যবহার করবেন?
পাঠ ২-এ, ভিআর রোবট [ড্রাইভ ফর] ব্লক ব্যবহার করে একটি নির্দিষ্ট দূরত্ব ড্রাইভ করে একটি নীল ডিস্ক তুলে লক্ষ্যস্থলে ফিরিয়ে নিয়ে গেছে। ডিস্ক মুভার প্লেগ্রাউন্ড-এ গ্রিড স্কোয়ারের মাত্রা ব্যবহার করে VR রোবট এবং প্রথম নীল ডিস্কের মধ্যে দূরত্ব অনুমান এবং পরীক্ষা করা হয়েছিল। যদিও এটি চ্যালেঞ্জটি সমাধান করেছে, বিভিন্ন দূরত্বে একাধিক ডিস্ক তোলার প্রক্রিয়াটি নকল করার ক্ষেত্রে ত্রুটির অনেক জায়গা রয়েছে, যা এই ইউনিটের শেষে ডিস্ক মুভার চ্যালেঞ্জ সমাধানের জন্য প্রয়োজনীয়। রিপোর্ট করা সেন্সর ফিডব্যাক ব্যবহার করা এই চ্যালেঞ্জ সমাধানের জন্য আরও কার্যকর উপায়, একই সাথে কম ব্লক ব্যবহার করে প্রকল্পটি অপ্টিমাইজ করাও সম্ভব।
যদি ভিআর রোবটটি একটি ডিস্কের সাথে সংঘর্ষে লিপ্ত হয় এবং পথ থেকে সরে যায়? যদি ডিস্কগুলো লক্ষ্য থেকে একটু ভিন্ন স্থানে থাকে? সেন্সর থেকে প্রাপ্ত প্রতিক্রিয়া ডিস্ক মুভার প্লেগ্রাউন্ডএ ডিস্কগুলির সঠিক অবস্থান না জেনেও সঠিকভাবে তুলে নিতে এবং সরাতে ব্যবহার করা যেতে পারে।
প্রকল্পে কোন সেন্সর ব্যবহার করা হবে তা নির্ধারণ করতে চ্যালেঞ্জ সমাধানের পদক্ষেপগুলি ব্যবহার করা যেতে পারে।
-
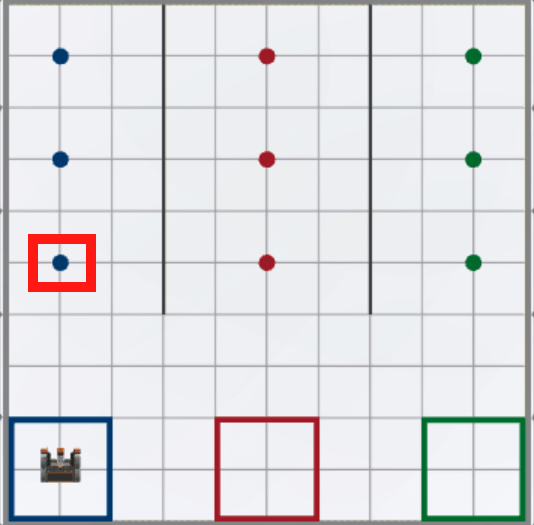
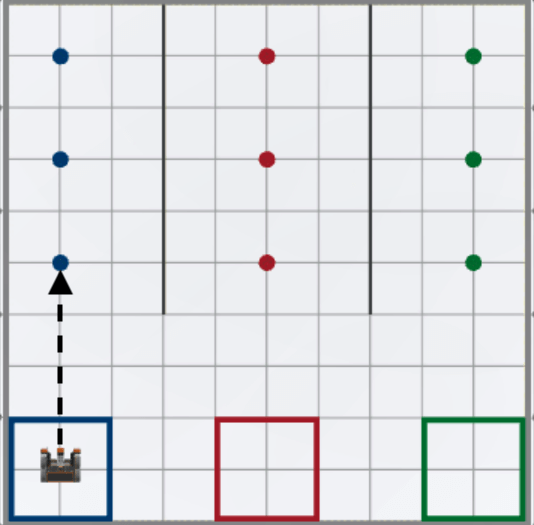
প্রথম: ভিআর রোবটটি প্রথম নীল ডিস্কে গাড়ি চালাবে।
-
ডিস্কগুলি খেলার মাঠের মাটিতে রয়েছে। একটি ডিস্ক কোথায় অবস্থিত তা নির্ধারণ করতে, <Eye Sensor near object> ব্লকের সাথে ডাউন আই সেন্সর ব্যবহার করা যেতে পারে।

-
-
দ্বিতীয়ত: ভিআর রোবট প্রথম নীল ডিস্কটি তুলে নেবে।

-
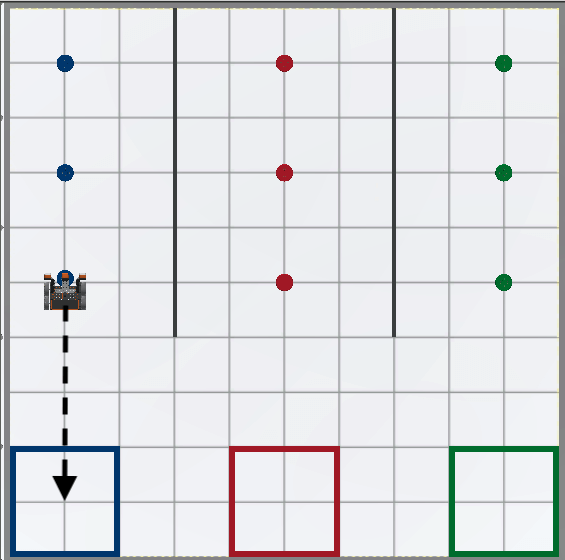
তৃতীয়: ভিআর রোবট নীল লক্ষ্যে ফিরে যাবে।
-
নীল লক্ষ্যে ফিরে যাওয়ার সময়, VR রোবটটি কখন ড্রাইভিং বন্ধ করতে হবে তা নির্ধারণ করতে দূরত্ব সেন্সর ব্যবহার করবে। খেলার মাঠের দেয়াল থেকে ভিআর রোবটের সামনের অংশ কত দূরে তা নির্ধারণ করতে দূরত্ব সেন্সর ব্যবহার করা যেতে পারে।
-
-
অবশেষে: ভিআর রোবট নীল ডিস্কটিকে নীল গোলে ফেলে দেবে।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।