
Lektion 3: Festplatten aufnehmen und bewegen
In der vorherigen Lektion haben Sie den Block [Elektromagneten aktivieren] und die Antriebsstrangblöcke verwendet, um Festplatten auf dem Disk Mover Playground mit dem VR-Roboter aufzunehmen und zu bewegen. In dieser Lektion wird die gleiche Herausforderung mithilfe des berichteten Sensor-Feedbacks und der Blöcke [Wiederholen bis] gelöst.
Lernergebnisse
- Legen Sie fest, wie der Block [Wiederholen bis] in einem Projekt verwendet werden soll.
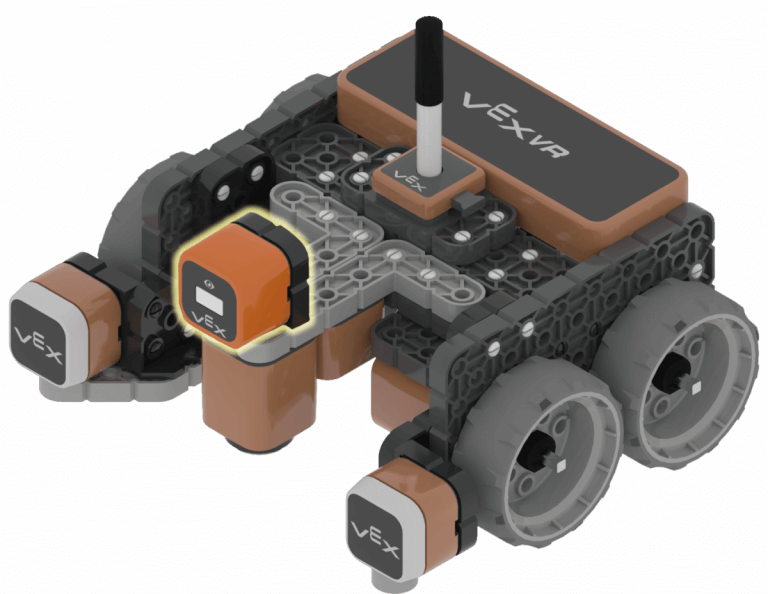
- Stellen Sie fest, dass der <Eye Sensor near object> Block meldet, ob sich der Augensensor in der Nähe eines Objekts befindet, um eine Farbe zu erkennen.
- Stellen Sie mithilfe des Gyro-Sensors fest, dass der Befehl [Turn to heading] einen Antriebsstrang auf eine bestimmte Richtung dreht.
- Stellen Sie fest, dass der Befehl [Turn to heading] auf der Grundlage des aktuellen Kurses des Gyro-Sensors bestimmt, in welche Richtung gedreht werden soll.
- Erklären Sie, warum ein [Turn to heading] -Befehl anstelle eines [Turn] - oder eines [Turn for] -Befehls verwendet wird.
Warum Sensoren verwenden?
In Lektion 2 fuhr der VR-Roboter eine bestimmte Strecke mit dem Block [Drive for], um eine blaue Platte aufzunehmen und zurück zum Ziel zu bewegen. Der Abstand zwischen dem VR-Roboter und der ersten blauen Festplatte wurde anhand der Abmessungen der Gitterquadrate auf dem Disk Mover Playground geschätzt und überprüft. Obwohl dies die Herausforderung gelöst hat, gibt es viel Raum für Fehler bei der Duplizierung des Prozesses, um mehrere Festplatten in verschiedenen Entfernungen aufzunehmen, was notwendig ist, um die Disk Mover-Herausforderung am Ende dieser Einheit zu lösen. Die Verwendung von berichtetem Sensor-Feedback ist eine effizientere Möglichkeit, diese Herausforderung zu lösen und gleichzeitig das Projekt zu optimieren, indem weniger Blöcke verwendet werden.
Was ist, wenn der VR-Roboter mit einer Scheibe kollidiert und vom Kurs abkommt? Was ist, wenn sich die Festplatten an leicht abweichenden Stellen vom Ziel befinden? Rückmeldungen von Sensoren können verwendet werden, um Platten präzise aufzunehmen und zu bewegen, ohne ihre genaue Position auf dem Disk Mover Playground zu kennen.
Die Schritte zur Lösung der Herausforderung können verwendet werden, um zu bestimmen, welche Sensoren im Projekt verwendet werden sollen.
-
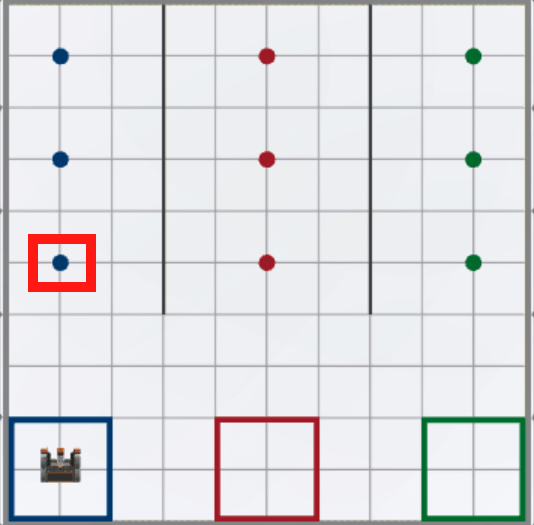
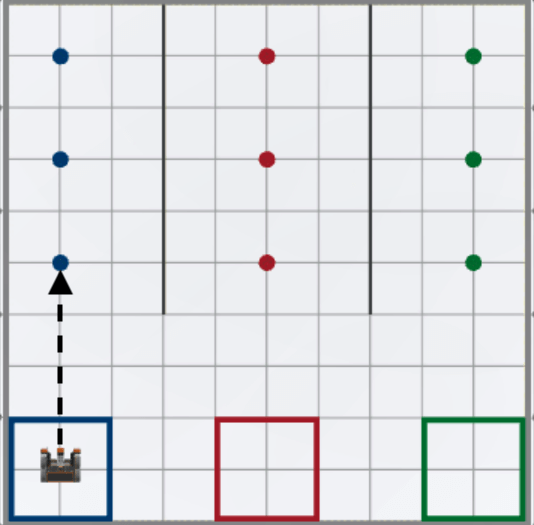
Erstens: Der VR-Roboter fährt zur ersten blauen Festplatte.
-
Die Scheiben befinden sich auf dem Boden des Spielplatzes. Um festzustellen, wo sich eine Festplatte befindet, kann der Down Eye Sensor mit dem <Eye Sensor near object> Block verwendet werden.

-
-
Zweitens: Der VR-Roboter nimmt die erste blaue Festplatte auf.

-
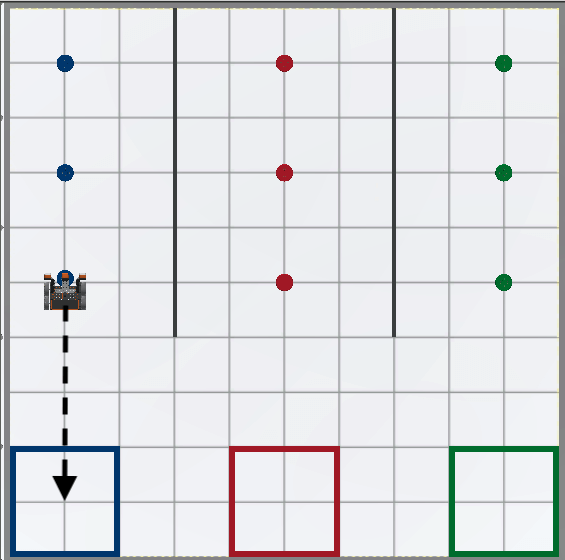
Drittens: Der VR-Roboter fährt zurück zum blauen Tor.
-
Während der Fahrt zurück zum blauen Ziel verwendet der VR-Roboter den Abstandssensor, um zu bestimmen, wann er aufhören soll zu fahren. Der Abstandssensor kann verwendet werden, um festzustellen, wie weit die Vorderseite des VR-Roboters von der Wand des Spielplatzes entfernt ist.
-
-
Schließlich: Der VR-Roboter lässt die blaue Scheibe in das blaue Tor fallen.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.