
الدرس 3: التقاط الأقراص ونقلها
في الدرس السابق، استخدمت كتلة [Energize Electromagnet] وكتل مجموعة نقل الحركة لالتقاط الأقراص ونقلها على Disk Mover Playground باستخدام روبوت الواقع الافتراضي. سيحل هذا الدرس نفس التحدي باستخدام ملاحظات المستشعر المبلغ عنها وكتل [Repeat until].
مخرجات التعلم
- حدد كيفية استخدام كتلة [Repeat until] في المشروع.
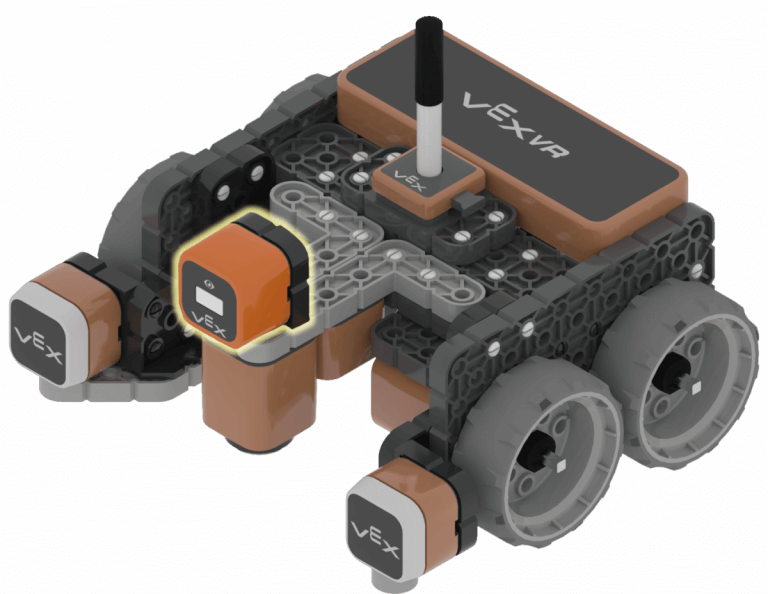
- حدد أن <Eye Sensor near object> الكتلة تبلغ عما إذا كان مستشعر العين قريبًا بما يكفي من كائن للكشف عن لون.
- حدد أن الأمر [Turn to heading] يحول مجموعة نقل الحركة إلى عنوان محدد، باستخدام مستشعر الدوران.
- حدد أن الأمر [انتقل إلى العنوان] سيحدد الاتجاه الذي يجب تشغيله بناءً على العنوان الحالي لمستشعر الدوران.
- اشرح سبب استخدام الأمر [Turn to heading] بدلاً من الأمر [Turn] أو [Turn for].
لماذا تستخدم أجهزة الاستشعار ؟
في الدرس 2، قاد روبوت الواقع الافتراضي مسافة محددة باستخدام كتلة [Drive for] لالتقاط قرص أزرق ونقله مرة أخرى إلى الهدف. تم تقدير المسافة بين روبوت الواقع الافتراضي والقرص الأزرق الأول وفحصها باستخدام أبعاد مربعات الشبكة على Disk Mover Playground. في حين أن هذا قد حل التحدي، إلا أن هناك مجالًا كبيرًا للخطأ في تكرار العملية لالتقاط أقراص متعددة على مسافات مختلفة، وهو أمر ضروري لحل تحدي محرك الأقراص في نهاية هذه الوحدة. يعد استخدام ملاحظات المستشعر المبلغ عنها طريقة أكثر فاعلية لحل هذا التحدي، مع تحسين المشروع أيضًا باستخدام عدد أقل من الكتل.
ماذا لو اصطدم روبوت الواقع الافتراضي بقرص وخرج عن مساره ؟ ماذا لو كانت الأقراص في مواقع مختلفة قليلاً عن الهدف ؟ يمكن استخدام التغذية الراجعة من المستشعرات لالتقاط الأقراص ونقلها بدقة دون معرفة موقعها الدقيق في ملعب Disk Mover.
يمكن استخدام خطوات حل التحدي لتحديد أجهزة الاستشعار التي يجب استخدامها في المشروع.
-
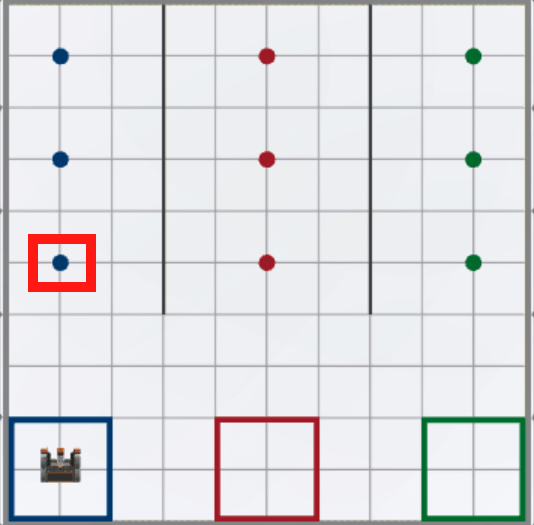
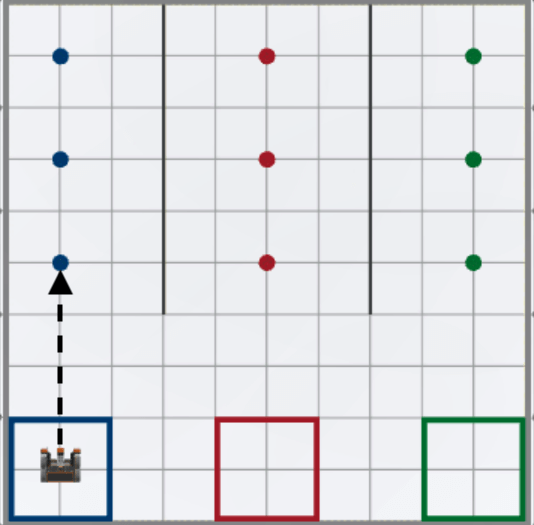
أولاً: سيقود روبوت الواقع الافتراضي إلى أول قرص أزرق.
-
الأقراص على أرض الملعب. لتحديد مكان وجود القرص، يمكن استخدام مستشعر العين السفلي مع <Eye Sensor near object> الكتلة.

-
-
ثانيًا: يلتقط روبوت الواقع الافتراضي أول قرص أزرق.

-
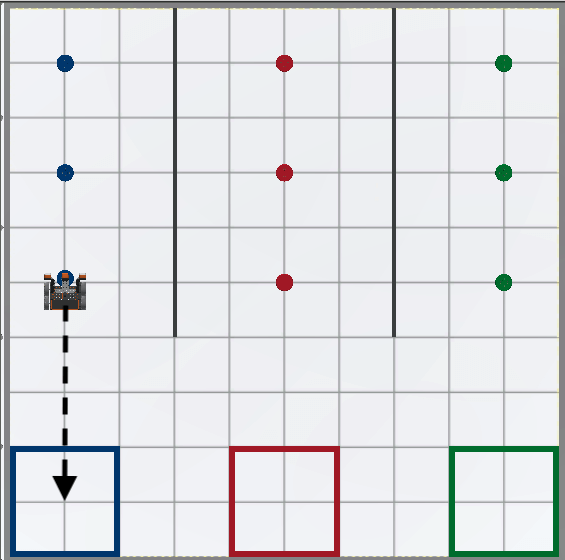
ثالثًا: سيعود روبوت الواقع الافتراضي إلى الهدف الأزرق.
-
أثناء القيادة إلى الهدف الأزرق، سيستخدم روبوت الواقع الافتراضي مستشعر المسافة لتحديد وقت التوقف عن القيادة. يمكن استخدام مستشعر المسافة لتحديد مدى بعد مقدمة روبوت الواقع الافتراضي عن جدار الملعب.
-
-
أخيرًا: سيسقط روبوت الواقع الافتراضي القرص الأزرق في الهدف الأزرق.
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.