
Auparavant, vous avez appris à coder le bras à 6 axes pour ramasser et placer des cubes sur une palette. Vous avez ensuite revisité cette compétence dans la leçon précédente en apprenant à élaborer et à mettre en œuvre un plan pour un projet VEXcode.
Dans cette leçon, vous allez :
- Créez un plan pour empiler des cubes sur une palette.
- Codez le bras à 6 axes pour empiler les cubes sur une palette.
- Modifiez les coordonnées de l' axe z pour tenir compte de la hauteur d'un cube afin de créer une pile.
À la fin de cette leçon, vous allez planifier et construire un projet où le bras à 6 axes crée deux piles de deux cubes sur les palettes.

Élaborer un plan
Vous avez appris à faire un plan pour placer un cube sur la palette dans la leçon précédente. Maintenant, nous allons utiliser le même processus pour faire un plan pour empiler les cubes. Suivez les étapes suivantes pour créer un plan pour empiler le deuxième cube sur le premier.
Remarque : Commencez par dupliquer votre plan de la leçon 1 de l'unité 8 dans votre cahier d'ingénierie. Ce plan s'appuie sur le plan présenté dans la leçon 1. Nous allons construire à partir de ce plan existant pour empiler des cubes. Il est important de garder vos notes pour les leçons 1 et 2 séparées afin de pouvoir faire référence aux notes spécifiques lorsque vous regardez en arrière sur cette unité.

Mettez à jour l'objectif du plan. Le plan que nous faisons est de déplacer un cube de la zone de chargement vers une palette, puis d'empiler un deuxième cube sur le premier.

Ajoutez deux étapes supplémentaires au plan pour tenir compte de ce qui doit se passer avec le deuxième cube.
- Prenez un deuxième cube.
- Empilez le deuxième cube sur le premier cube.

Examinez votre plan pour les deux premières étapes. Les étapes 1 et 3 sont les mêmes parce que vous prenez un cube dans la zone de chargement. Copiez les comportements décomposés de l'étape 1 dans l'étape 3.

Retirez « Réglez l'effecteur d'extrémité du bras à 6 axes sur Aimant ». Cela était déjà terminé au début du plan.

Comparez les comportements décomposés à l'étape 2 à l'action que vous souhaitez effectuer à l'étape 4. Quels éléments du plan peuvent être réutilisés ?

Copiez les comportements décomposés de l'étape 2 dans l'étape 4.

Mettez à jour le comportement décomposé à l'étape 4b pour dire « Déplacez le bras à 6 axes vers le bas pour placer le cube sur le premier cube ».
Lors de la construction du plan, de nombreux éléments du plan de la leçon 1 ont été réutilisés. Vous remarquerez au fur et à mesure que vous construisez de plus en plus de plans qu'il y aura des éléments communs que vous pourrez réutiliser. Cela est utile lorsque vous abordez des projets plus complexes. Vous pouvez consulter votre carnet d'ingénierie, étudier les plans et les projets VEXcode connexes qui ont été construits et utiliser des éléments de ces plans réussis dans de nouveaux projets.
| Déplacez un cube de la zone de chargement vers une palette. |
| Empilez un deuxième cube sur le premier cube. |
| 1. Prenez le cube. |
| a. Réglez l'effecteur d'extrémité du bras à 6 axes sur Aimant. |
| b. Déplacez le bras à 6 axes vers le cube dans la zone de chargement. |
| c. Fixez le cube à l'aimant. |
| d. Déplacez le bras à 6 axes au-dessus de la zone de chargement. |
| 2. Placez le cube sur la palette. |
| a. Déplacez le bras à 6 axes au-dessus de la palette. |
| b. Déplacez le bras à 6 axes vers le bas pour placer le cube sur la palette. |
| c. Libérez le cube de l'aimant. |
| d. Déplacez le bras à 6 axes au-dessus de la palette. |
| 3. Prenez un deuxième cube |
| a. Déplacez le bras à 6 axes vers le cube dans la zone de chargement. |
| b. Fixez le cube à l'aimant. |
| c. Déplacez le bras à 6 axes au-dessus de la zone de chargement. |
| 4. Empilez le deuxième cube sur le premier cube. |
| a. Déplacez le bras à 6 axes au-dessus de la palette. |
| b. Déplacez le bras à 6 axes vers le bas pour placer le cube sur le premier cube. |
| c. Libérez le cube de l'aimant. |
| d. Déplacez le bras à 6 axes au-dessus de la palette. |
Après avoir créé le plan d'empilage des cubes sur la palette, nous pouvons nous préparer à mettre en œuvre ce plan dans VEXcode.
Mise en œuvre du plan
Maintenant que les étapes nécessaires pour empiler les deux cubes sont décomposées en comportements les plus petits possibles, le projet d'empiler les cubes est prêt à être construit. Le plan écrit dans le cahier d'ingénierie servira de guide pour l'organisation et la construction du projet.
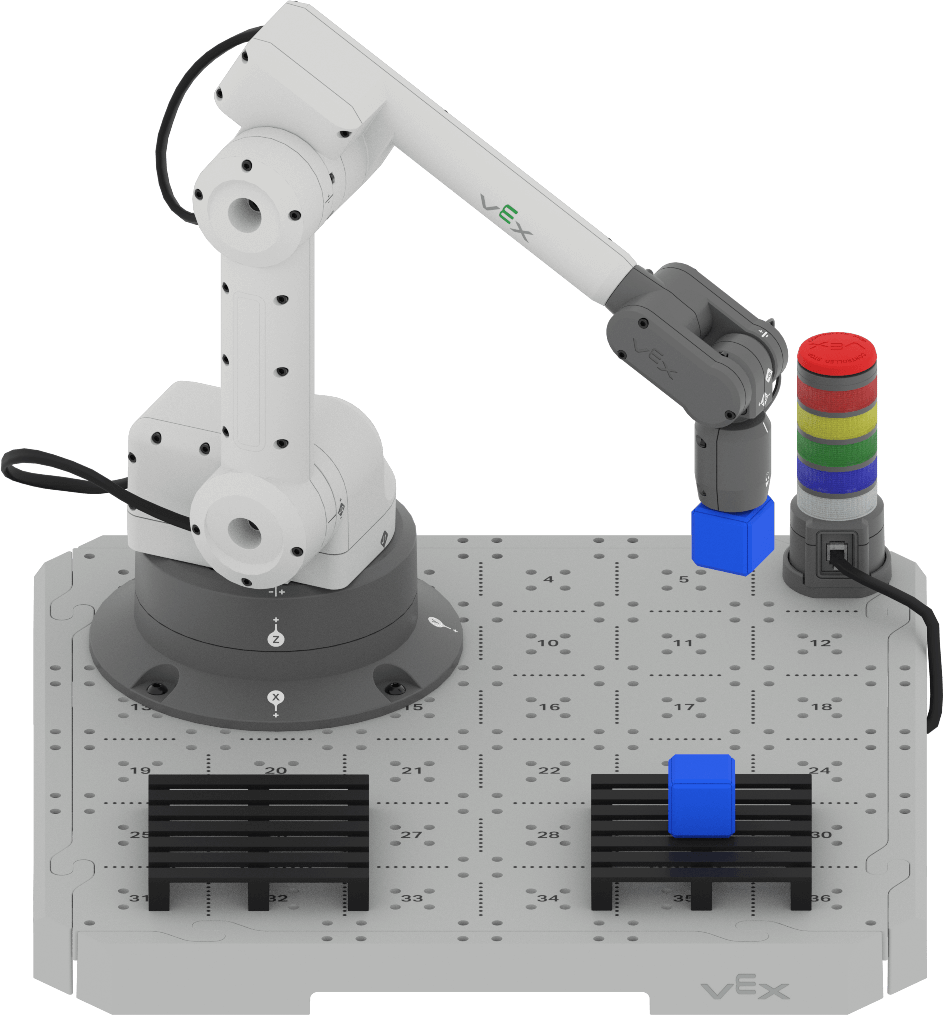
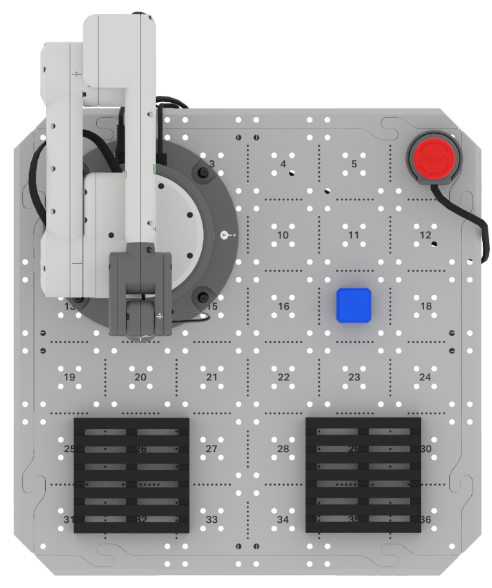
Configurez pour le projet en plaçant un cube dans la zone de chargement sur l'emplacement 17 de la tuile, comme indiqué ci-dessous. Suivez les étapes suivantes pour construire votre projet.
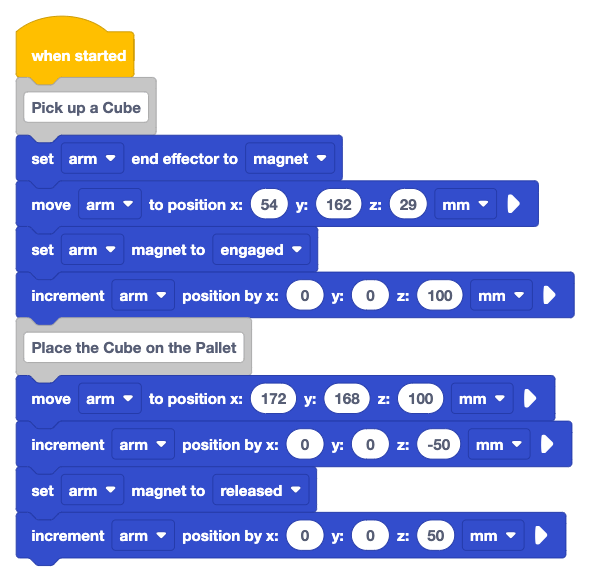
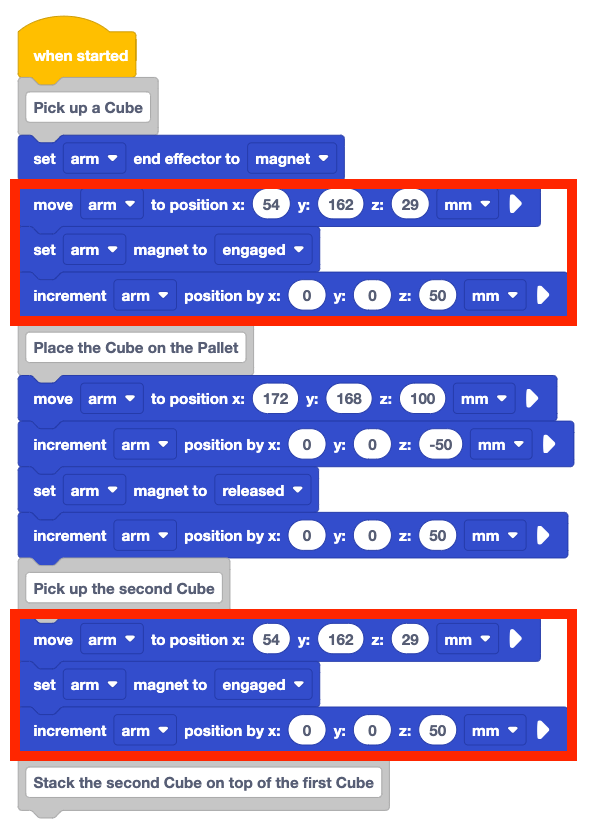
Ouvrez votre projet Unité 8 Leçon 1 dans VEXcode. Ce projet déplace un cube de la zone de chargement au centre de la palette. Vous allez vous appuyer sur ce projet pour empiler un deuxième Cube sur le premier.
Notez que les coordonnées indiquées ici sont un exemple, et vous devez utiliser vos coordonnées pour vous assurer que le bras à 6 axes se comporte comme prévu.
Renommez le projet en Unité 8 Leçon 2 et enregistrez-le sur votre appareil.
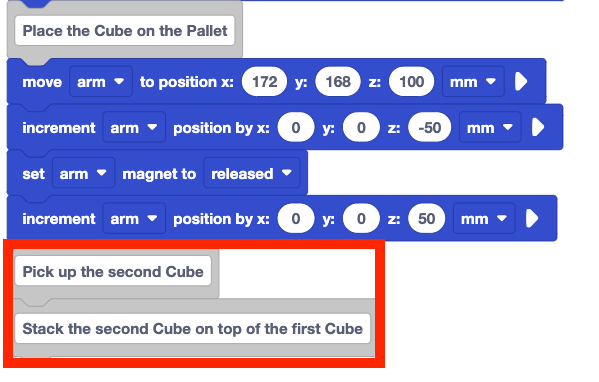
Ajoutez deux blocs de commentaires à la fin du projet. Tapez les principales étapes du plan pour empiler un deuxième cube sous forme de commentaires. Ceux-ci doivent correspondre aux étapes de votre cahier d'ingénierie.
- Prenez le deuxième cube
- Empilez le deuxième cube sur le premier cube
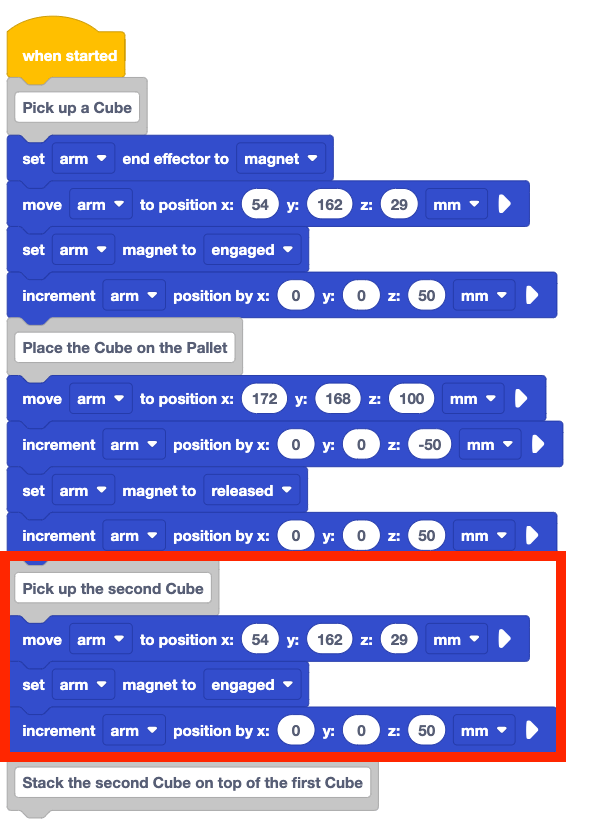
Recréez la première partie du projet sous le bloc de commentaires « Pick up the Cube » et placez-les sous le bloc de commentaires « Pick up the second Cube ».
La première partie de ce plan est presque identique au plan créé dans la leçon 1, y compris les coordonnées de la zone de chargement, de sorte que les mêmes blocs peuvent être utilisés.
Votre projet doit maintenant correspondre à la première étape du plan pour empiler le deuxième cube sur le premier. Notez que le bloc d'effecteur d'extrémité Set n'a pas été dupliqué car il ne fait pas partie de l'étape 3 du plan.
Assurez-vous que le bras à 6 axes est connecté à VEXcode. Exécutez le projet pour le tester.
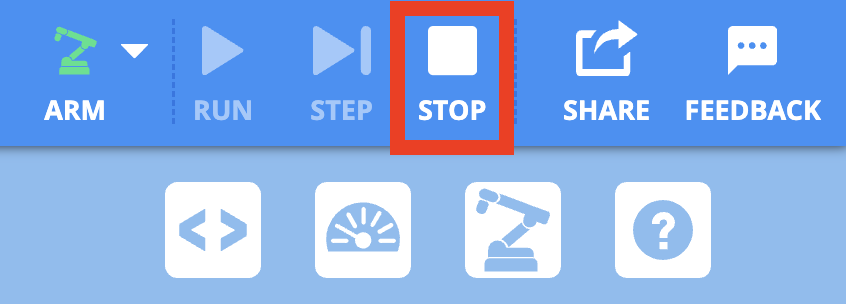
Arrêtez le projet lorsque le bras à 6 axes a fini de bouger.
Les comportements observés du bras à 6 axes correspondaient-ils à ceux de votre plan ? Pourquoi ou pourquoi pas ?
La première partie du projet a maintenant été testée et le deuxième cube a été récupéré avec succès dans la zone de chargement.
Maintenant, les prochaines étapes du plan peuvent être mises en œuvre.
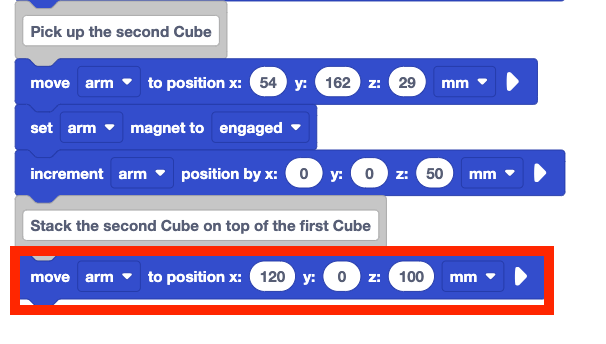
Ajoutez un bloc Déplacer pour positionner le bloc sous le bloc de commentaires « Empiler le deuxième cube sur le premier cube ».
Ce bloc correspondra au comportement « Déplacer le bras à 6 axes au-dessus de la palette » de votre plan.
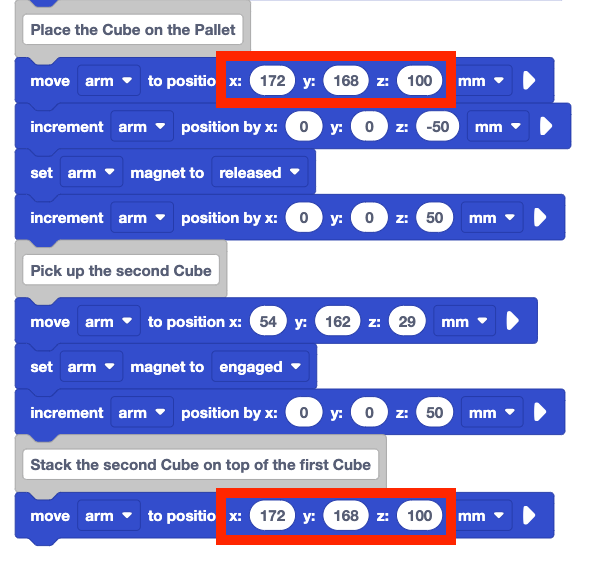
Définissez les paramètres x, y et z du bloc Déplacer en position sur les coordonnées documentées dans votre plan. Comme l'emplacement au-dessus de la palette n'a pas changé, les mêmes coordonnées utilisées pour déplacer le premier Cube au-dessus de la palette peuvent également être utilisées pour déplacer le deuxième Cube.
N'oubliez pas d'utiliser vos coordonnées dans votre projet, pour vous assurer que votre bras à 6 axes se déplace comme prévu. Les coordonnées indiquées ici en sont un exemple.
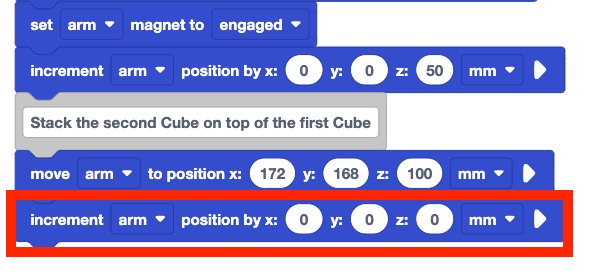
Ajoutez un bloc d'incrémentation de position à votre projet.
Cela correspond au comportement « Déplacer le bras à 6 axes vers le bas pour placer le cube sur le premier cube » dans le plan.
Le paramètre z dans le bloc de position d'incrémentation abaissera le bras à 6 axes de la distance nécessaire pour empiler le deuxième cube sur le premier. Pour déterminer cette valeur, nous devons connaître l'emplacement de l'aimant lorsque les deux cubes sont empilés l'un sur l'autre. Ce décalage peut être utilisé pour nous aider à déterminer dans quelle mesure le bras à 6 axes doit se déplacer le long de l'axe z pour empiler efficacement le cube.
En utilisant ce que nous savons sur la hauteur du Cube et la hauteur de la palette, nous pouvons approcher le décalage de la coordonnée z à 65 mm. Chaque cube mesure environ 25 mm de hauteur et la palette mesure 15 mm.
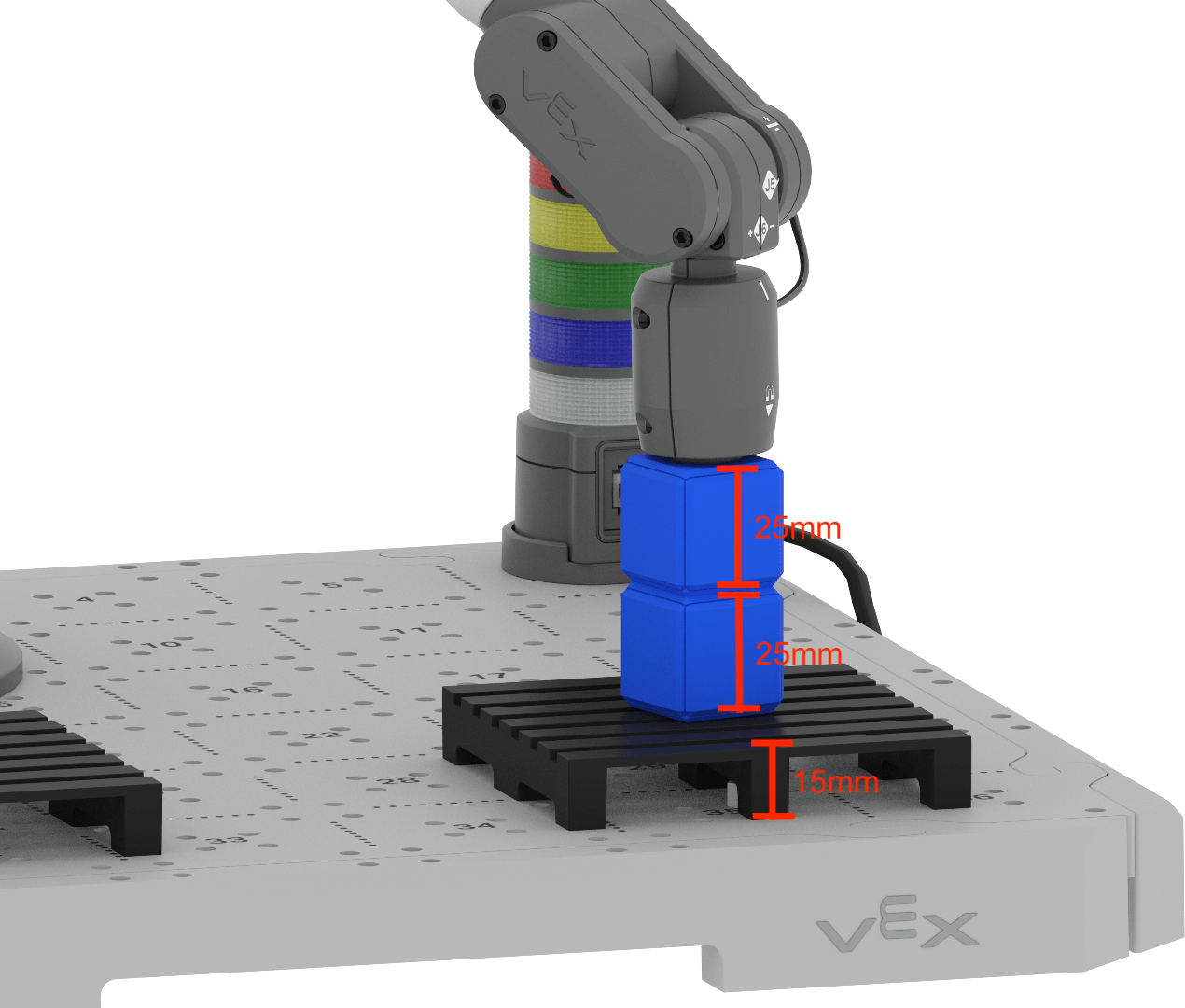
Il y a deux façons de déterminer jusqu'où sur l'axe z pour déplacer le bras à 6 axes.
- Pour passer de la position de départ (100 mm) à la position souhaitée, vous pouvez déterminer la différence. 100 mm – 65 mm est d'environ 35 mm. Pour éviter toute collision entre le bas du deuxième cube et le haut du premier, vous pouvez soustraire 5 à 10 mm de plus. Déplacer le bras à 6 axes dans la direction négative le long de l'axe z sur environ 25 mm permettra d'empiler le deuxième cube dans la position souhaitée.
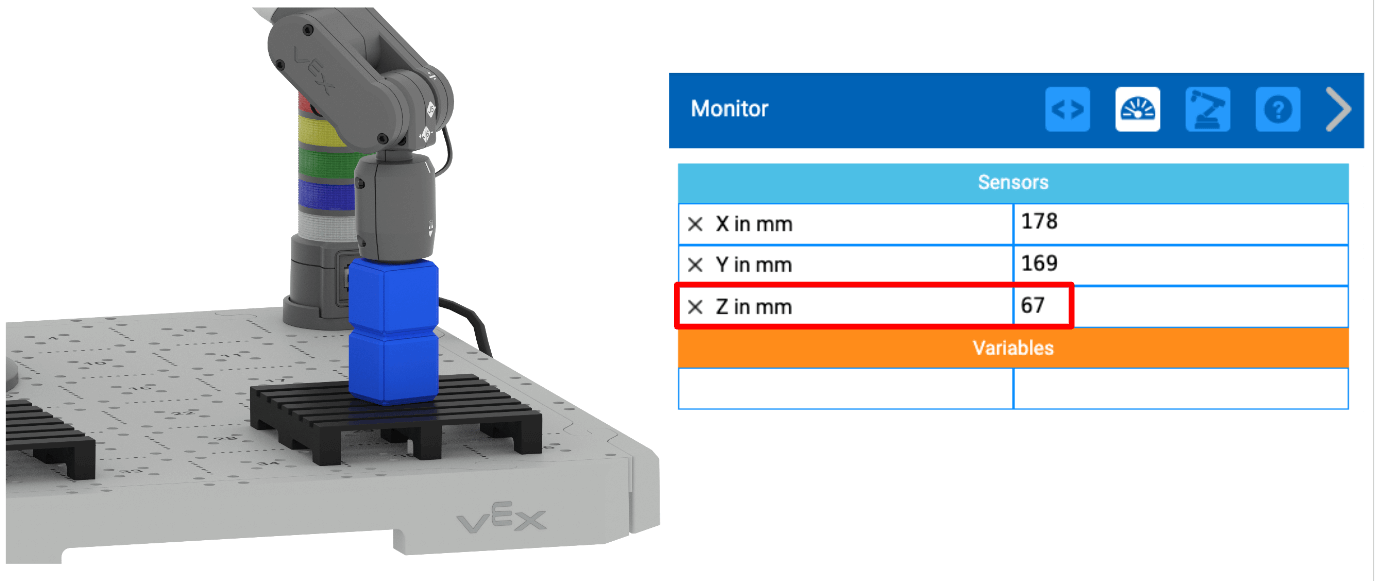
- Vous pouvez également utiliser la console de surveillance pour trouver la valeur z en
haut de la pile de cubes. Ces informations de la console de surveillance peuvent
être utilisées pour aider à déterminer le mouvement relatif nécessaire pour abaisser le
bras à 6 axes afin de placer le cube efficacement. Dans le projet que nous construisons,
la coordonnée z est réglée sur 100 mm lorsque le bras à 6 axes se déplace au-dessus du
cube sur la palette. Il s'agit de la position de départ du bras à 6 axes pour ce
mouvement relatif. La valeur z de la position du bras à 6 axes sur le dessus de la pile
dans l'exemple illustré ici est de 73 mm. Il s'agit de la position souhaitée du bras à 6
axes lors du placement du cube sur la pile.
Pour passer de la position de départ (100 mm) à la position souhaitée (73 mm), il faut environ 28 mm. Déplacer le bras à 6 axes dans la direction négative le long de l'axe z sur environ 25 mm permettra d'empiler le deuxième cube dans la position souhaitée.
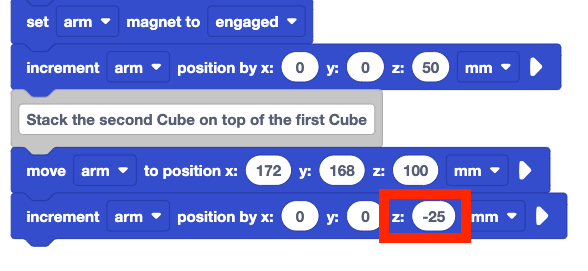
Réglez le paramètre z du bloc d'incrémentation de position sur –25.
Cela déplacera le bras à 6 axes dans la direction négative le long de l'axe z pour abaisser le cube.
Assurez-vous que le bras à 6 axes est connecté à VEXcode, que le premier cube est renvoyé dans la zone de chargement et que le second est placé sur le côté de la tuile.
Exécutez le projet pour le tester. Observez les comportements du bras à 6 axes.
Arrêtez le projet lorsque le bras à 6 axes a fini de bouger.
Les comportements que vous avez observés correspondaient-ils aux comportements énumérés dans votre plan ? Pourquoi ou pourquoi pas ?
Le bras à 6 axes aurait dû se déplacer pour ramasser et placer le premier cube sur la palette.
Ensuite, le bras à 6 axes a ramassé et placé le deuxième cube au-dessus du premier.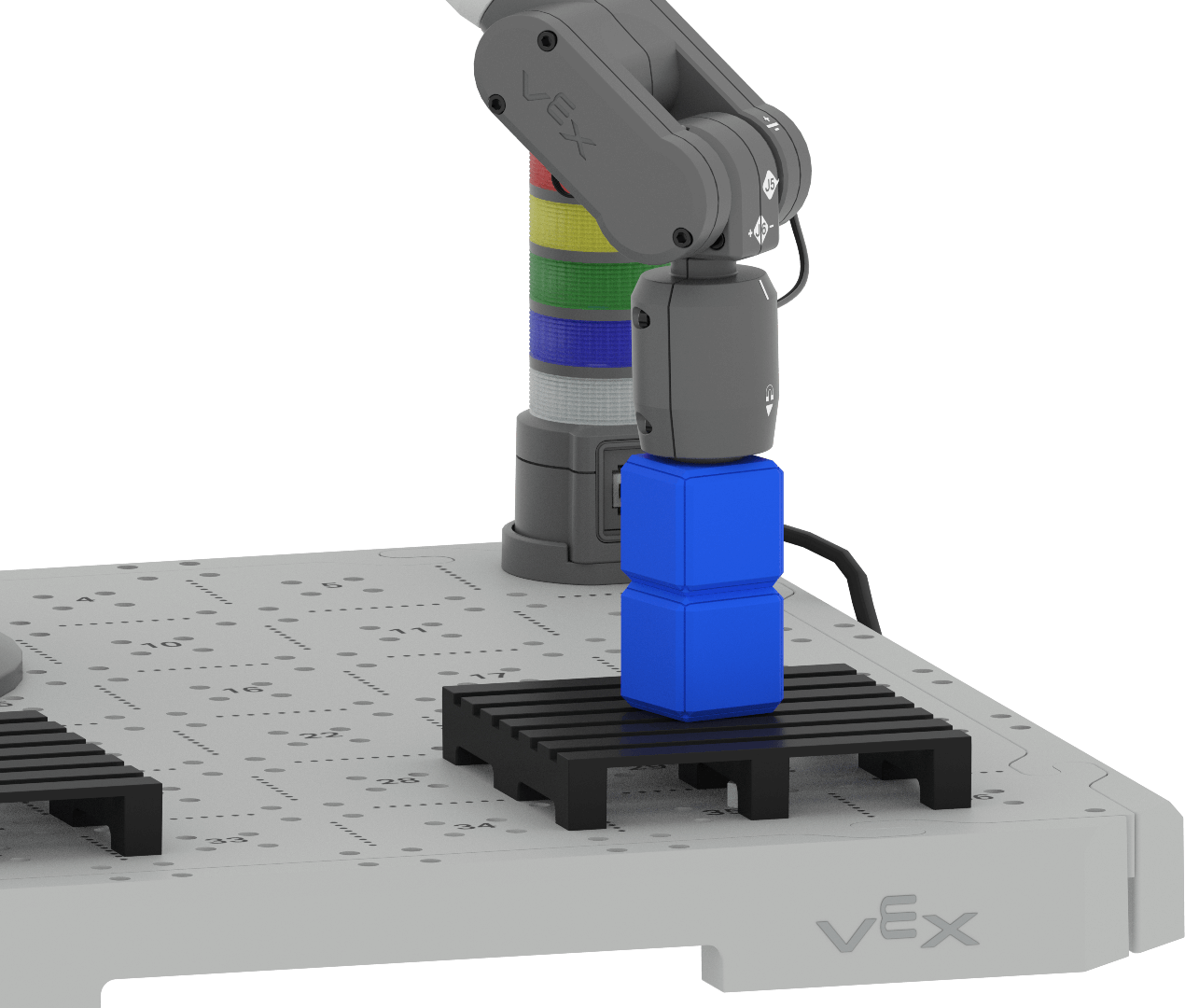
Maintenant que nous savons comment le bras à 6 axes placera le deuxième cube, nous pouvons ajouter au projet pour terminer la mise en œuvre du plan.
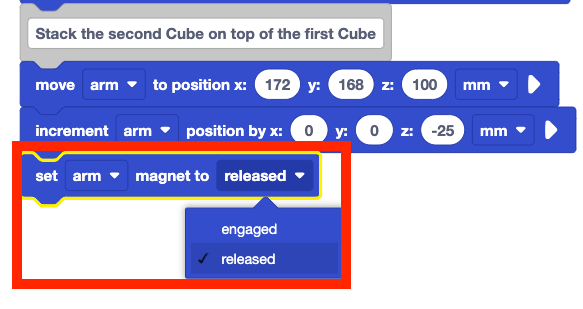
Ajoutez un bloc magnétique Set ARM au projet. Réglez le paramètre sur « libéré ».
Ce bloc correspond au comportement « Libérer l'aimant » dans le plan.
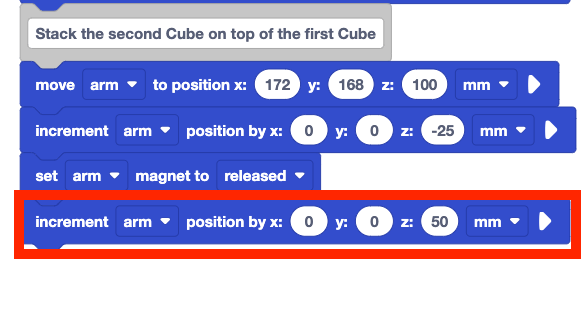
Ajoutez un bloc de position d' incrément à la fin du projet. Réglez le paramètre z sur 50.
Cela correspond au comportement final « Déplacer le bras à 6 axes au-dessus de la palette » dans le plan.
Assurez-vous que le bras à 6 axes est connecté à VEXcode, que le premier cube est renvoyé dans la zone de chargement et que le second est placé sur le côté de la tuile.
Exécutez le projet pour le tester. Observez les comportements du bras à 6 axes.
Arrêtez le projet lorsque le bras à 6 axes a fini de bouger.
Les comportements que vous avez observés correspondaient-ils aux comportements énumérés dans votre plan ? Pourquoi ou pourquoi pas ?
Le bras à 6 axes a ramassé et déplacé deux cubes vers la palette, empilant le second sur le premier.

Activité
Maintenant que vous avez fait un plan et codé le bras à 6 axes pour empiler un cube de la zone de chargement sur un autre sur la palette, vous allez pratiquer ces compétences. Dans cette activité, vous développerez votre projet à partir de cette leçon pour coder le bras à 6 axes afin d'empiler deux cubes supplémentaires sur la deuxième palette.
Configuration : Placez un cube dans la zone de chargement sur l'emplacement de la tuile 17.
Activité : Codez le bras à 6 axes pour empiler deux cubes sur chaque
palette. 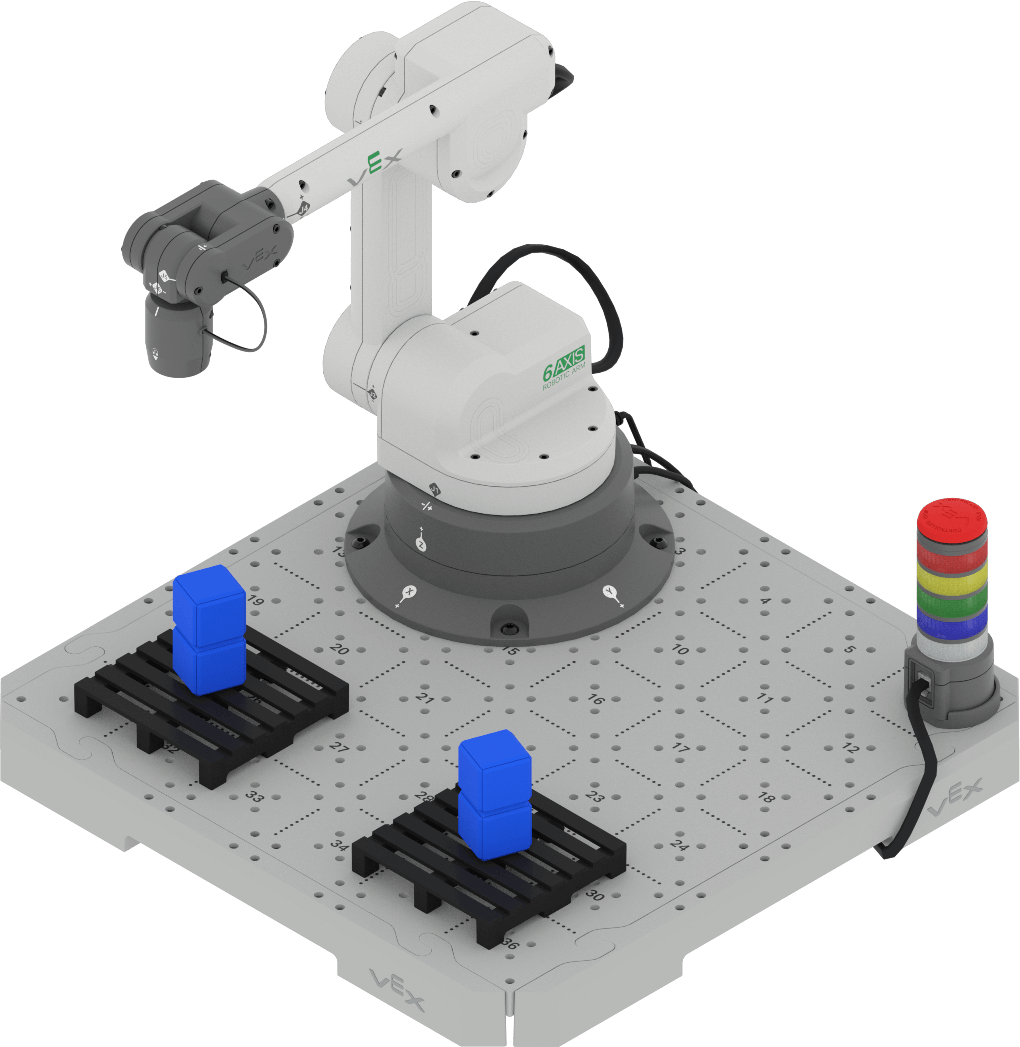
- Suivez le processus que vous avez appris pour élaborer un plan sur la façon de coder le
bras à 6 axes pour empiler deux cubes supplémentaires sur la deuxième palette avec
votre groupe. Assurez-vous que vous êtes tous d'accord sur votre approche avant de
commencer à développer votre projet. Vous pouvez développer votre projet à partir de
cette leçon.
- Documentez votre plan dans votre cahier d'ingénierie. Assurez-vous d'avoir décomposé chaque étape en comportements les plus petits possibles.
- Une fois que vous avez créé et documenté un plan, passez en revue votre plan avec votre enseignant.
- Construisez sur votre projet dans VEXcode pour correspondre au plan convenu par votre
groupe.
- Renommez l'activité de l'unité 8 de votre projet et enregistrez-la avant de commencer à modifier le projet.
- Utilisez des blocs de commentaires dans votre projet pour organiser votre projet en fonction de votre plan.
- Exécutez le projet par incréments pour le tester. Placez manuellement chacun des cubes dans la zone de chargement une fois que le cube précédent a été déplacé.
- Le bras à 6 axes crée-t-il avec succès les deux piles de cubes comme vous l'aviez
prévu ? Il doit y avoir une pile de deux cubes sur chaque palette. Sinon, continuez à
modifier le projet jusqu'à ce que vous ayez créé deux piles avec succès.
- Assurez-vous de documenter tout ajustement de votre plan dans votre cahier d'ingénierie.
Vérifiez votre compréhension
Avant de passer à la leçon suivante, assurez-vous de comprendre les concepts de cette leçon en répondant aux questions suivantes dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour passer à l'activité Tout mettre ensemble.