Concevoir, développer et itérer sur votre projet
Dans cette section, vous allez utiliser les projets que vous construisez dans la section Jouer pour créer un projet qui peut manipuler à la fois le bras et la griffe.
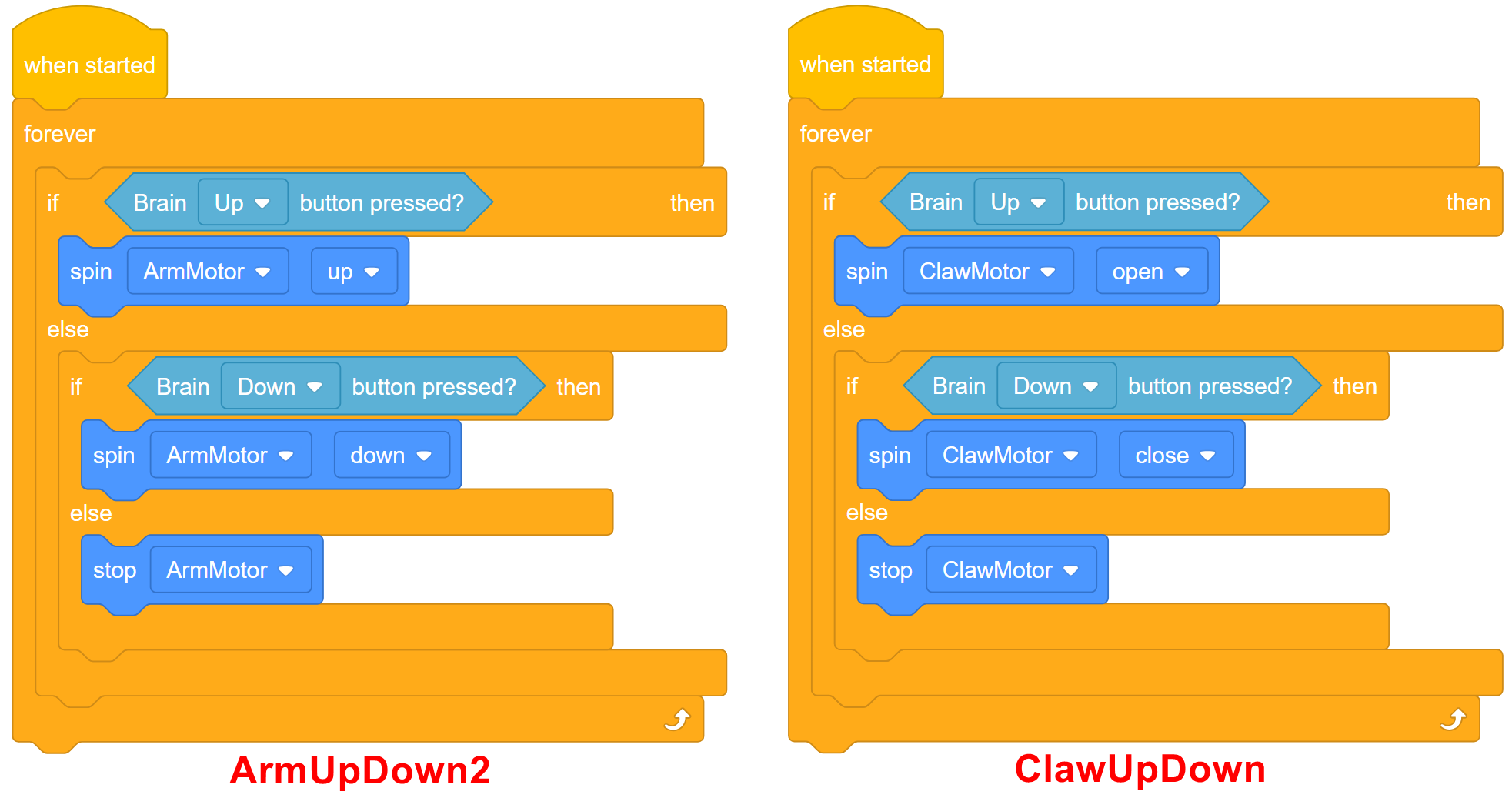
Rappelez-vous les projets ArmUpDown2 et ClawUpDown.
Nous voulons intégrer d'une manière ou d'une autre ces deux projets dans le même projet. Cependant, il n'y a qu'un seul bouton Brain Up et un seul bouton Brain Down.
Ainsi, nous avons besoin d'un bouton pour agir comme un « déclencheur » entre le bras et la griffe.
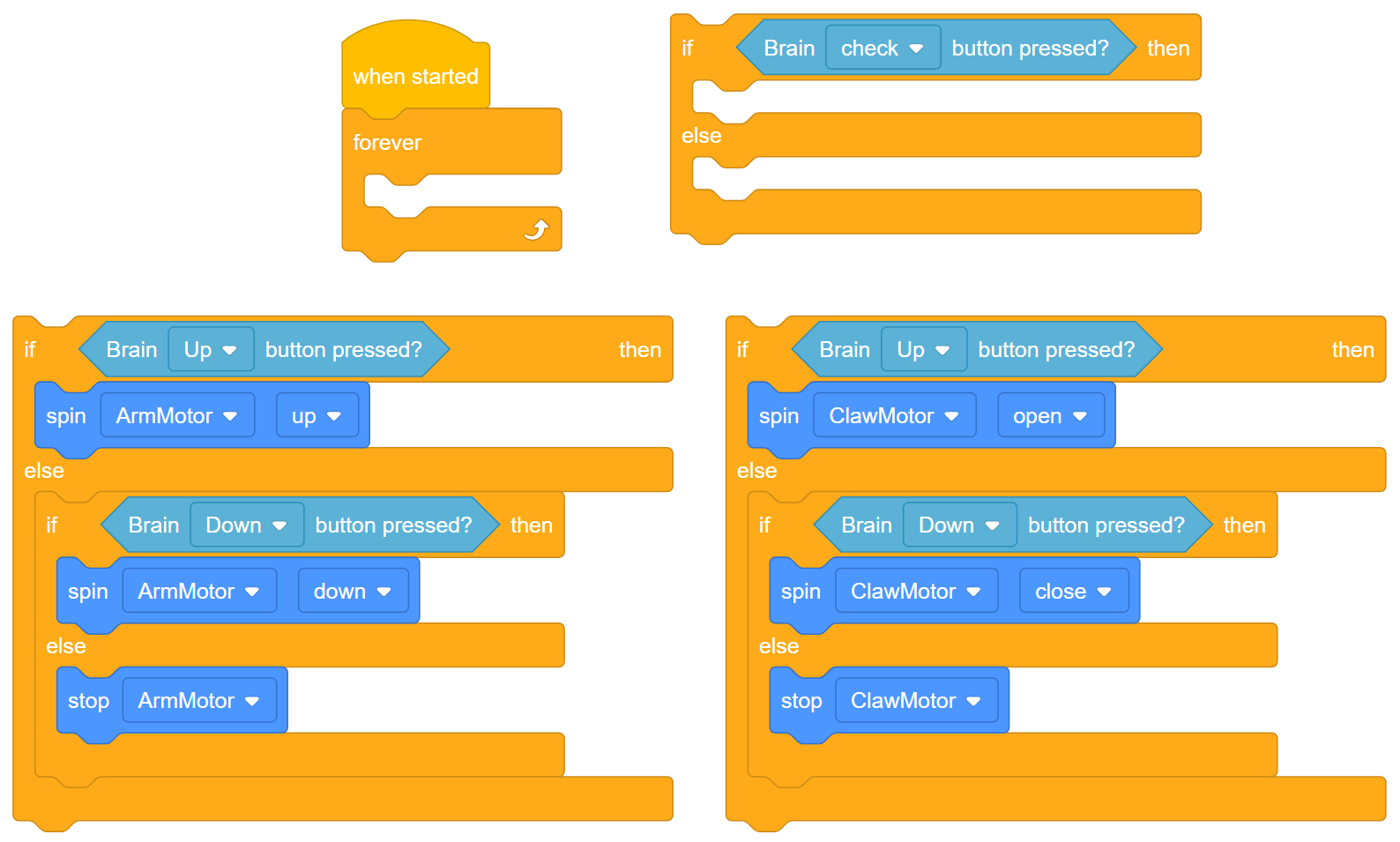
Utilisez le contour de blocs suivant pour vous aider à construire votre projet :
Répondez aux questions suivantes dans votre cahier d'ingénierie lorsque vous planifiez votre projet :
- Que voulez-vous programmer le robot à faire ? Expliquez avec des détails.
- Combien de conditions votre projet devra-t-il vérifier dans les blocs [If then else] ?
Astuce: Utilisez le bouton Vérification du cerveau comme « sélecteur » entre le bras et la griffe. Ainsi, si le bouton Brain Check est enfoncé et maintenu enfoncé, le bras est contrôlé à l'aide des boutons Brain Up et Down. Si le bouton Brain Check est relâché, la griffe est contrôlée à l'aide des boutons Brain Up et Down.
Suivez les étapes ci-dessous lorsque vous créez votre projet :
![]() Conseils à l'enseignant
Conseils à l'enseignant
-
Avant de passer à l'étape suivante de la programmation, demandez aux élèves de revoir et d'évaluer leur pseudo-code en suivant les étapes dans le contexte de l'appui sur les boutons du cerveau. Cliquez ici (Google / .docx / .pdf) pour un exemple de ce à quoi le pseudocode pourrait ressembler pour ce défi. Vous pouvez télécharger une rubrique de pseudo-code ici (Google / .docx / .pdf).
-
Rappelez aux élèves qu'ils peuvent utiliser la fonction Aide à l'intérieur de VEXcode IQ pour en savoir plus sur n'importe quel bloc.
![]() Boîte à outils de l'enseignant
Boîte à outils de l'enseignant
-
L'objectif est d'ajouter une programmation supplémentaire afin que le Clawbot ouvre ou ferme la griffe en appuyant sur un ou plusieurs boutons du cerveau du Clawbot (c'est-à-dire un bouton ou une paire de boutons pour ouvrir la griffe et un autre pour fermer la griffe). La programmation pour lever et abaisser le bras du Clawbot en appuyant sur des boutons sur le cerveau devrait déjà avoir été construite lors de la section Jouer.
-
Cette question vise à amener les élèves à réfléchir aux conditions nécessaires à l'intérieur des blocs [If then else]. L'interface utilisateur nécessitera cinq conditions à vérifier. La première condition vérifiée est si le bouton Vérifier est enfoncé. Si le bouton Check est enfoncé, les conditions suivantes à vérifier sont si le bouton Up est enfoncé (Condition 2) ou si le bouton Down est enfoncé (Condition 3). Si le bouton Check n'est pas enfoncé, le projet descend pour vérifier si seul le bouton Up est enfoncé (Condition 4) ou si le bouton Down est enfoncé (Condition 5).
-
Planifiez les conditions que votre projet doit vérifier à l'aide de dessins et de pseudocodes.
-
Utilisez le pseudo-code que vous avez créé pour développer votre projet.
-
Testez souvent votre projet et répétez-le en utilisant ce que vous avez appris de vos tests.
-
Que pourriez-vous ajouter à votre projet pour mieux contrôler les moteurs à griffes et à bras ? Expliquez avec des détails.
-
Partagez votre projet final avec votre professeur.
![]() Conseils à l'enseignant
Conseils à l'enseignant
Encouragez les élèves qui ont du mal à programmer à consulter la vidéo du tutoriel If Then Else Blocks dans VEXcode IQ. Ils devraient également utiliser leurs projets ArmUpDown2 et ClawUpDown de Play comme base pour ce nouveau projet. Les élèves ont reçu une liste de sources potentiellement utiles à utiliser comme références.
Si vous rencontrez des difficultés pour commencer, consultez les éléments suivants dans VEXcode IQ Blocks :
- Vidéos tutoriels If-Then-Else Blocks ou Using Loops
- Utilisation de la vidéo du tutoriel d'aide
- Versions précédentes de votre projet (ArmUpDown2 ou ClawUpDown)

![]() Étendez votre apprentissage
Étendez votre apprentissage
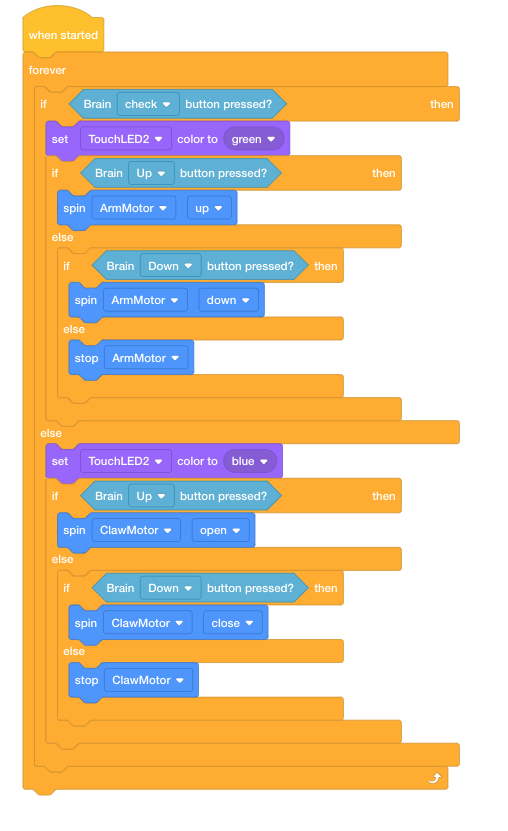
Demandez aux élèves d'intégrer la LED tactile ou demandez au robot de jouer un son lorsque les boutons sont basculés entre le bras et la griffe. Les élèves peuvent également allumer la LED tactile en vert lorsque le bras est contrôlé et en bleu lorsque la griffe est contrôlée.
Voici un exemple de solution :