프로젝트 설계, 개발 및 반복
이 섹션에서는 재생 섹션에서 빌드하는 프로젝트를 사용하여 팔과 발톱을 모두 조작할 수 있는 프로젝트를 만듭니다.
ArmUpDown2 및 ClawUpDown 프로젝트를 리콜합니다.
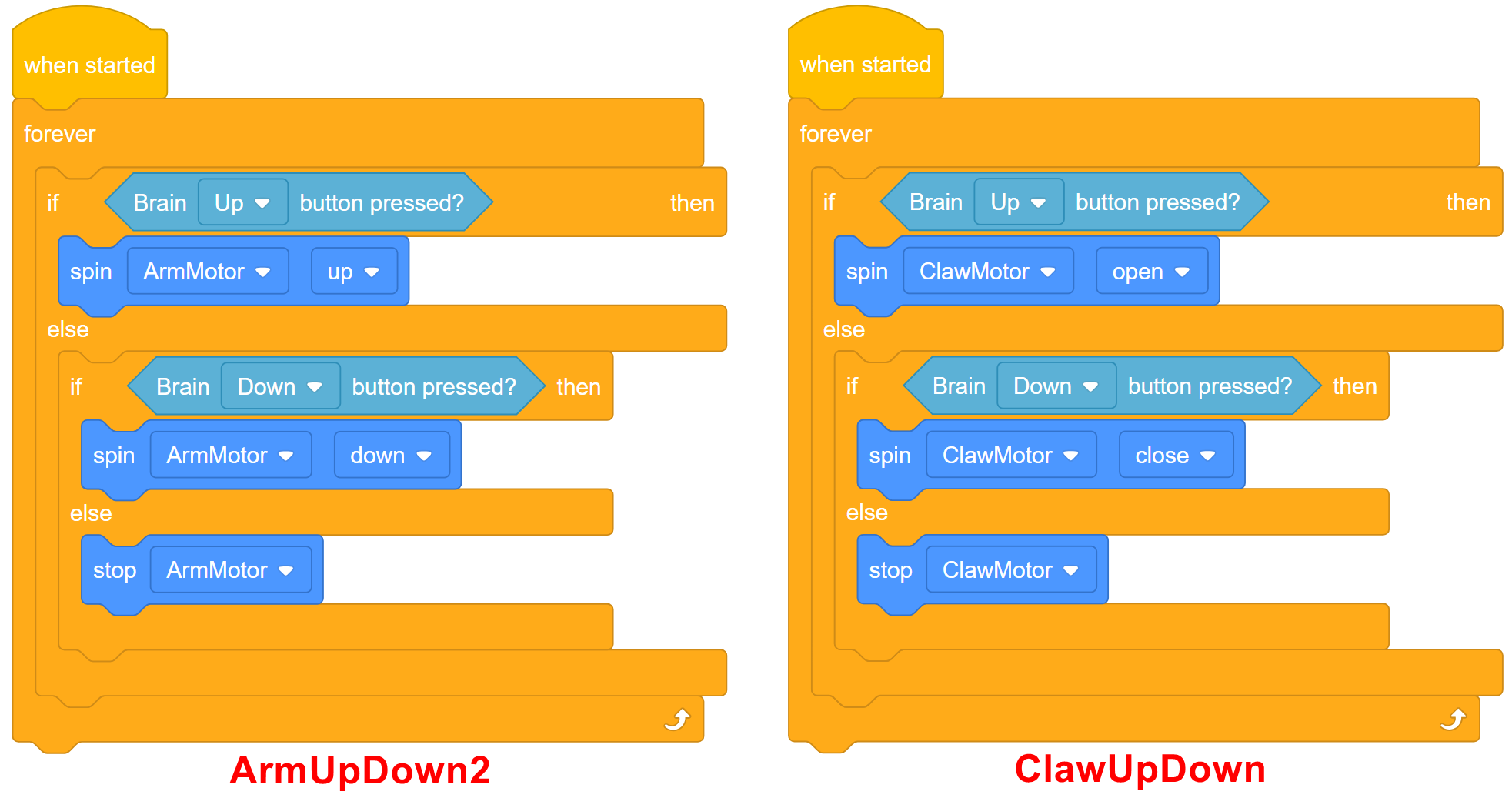
우리는 어떻게든 이 두 프로젝트를 동일한 프로젝트에 통합하고자 합니다. 그러나 Brain Up 버튼과 Brain Down 버튼은 하나뿐입니다.
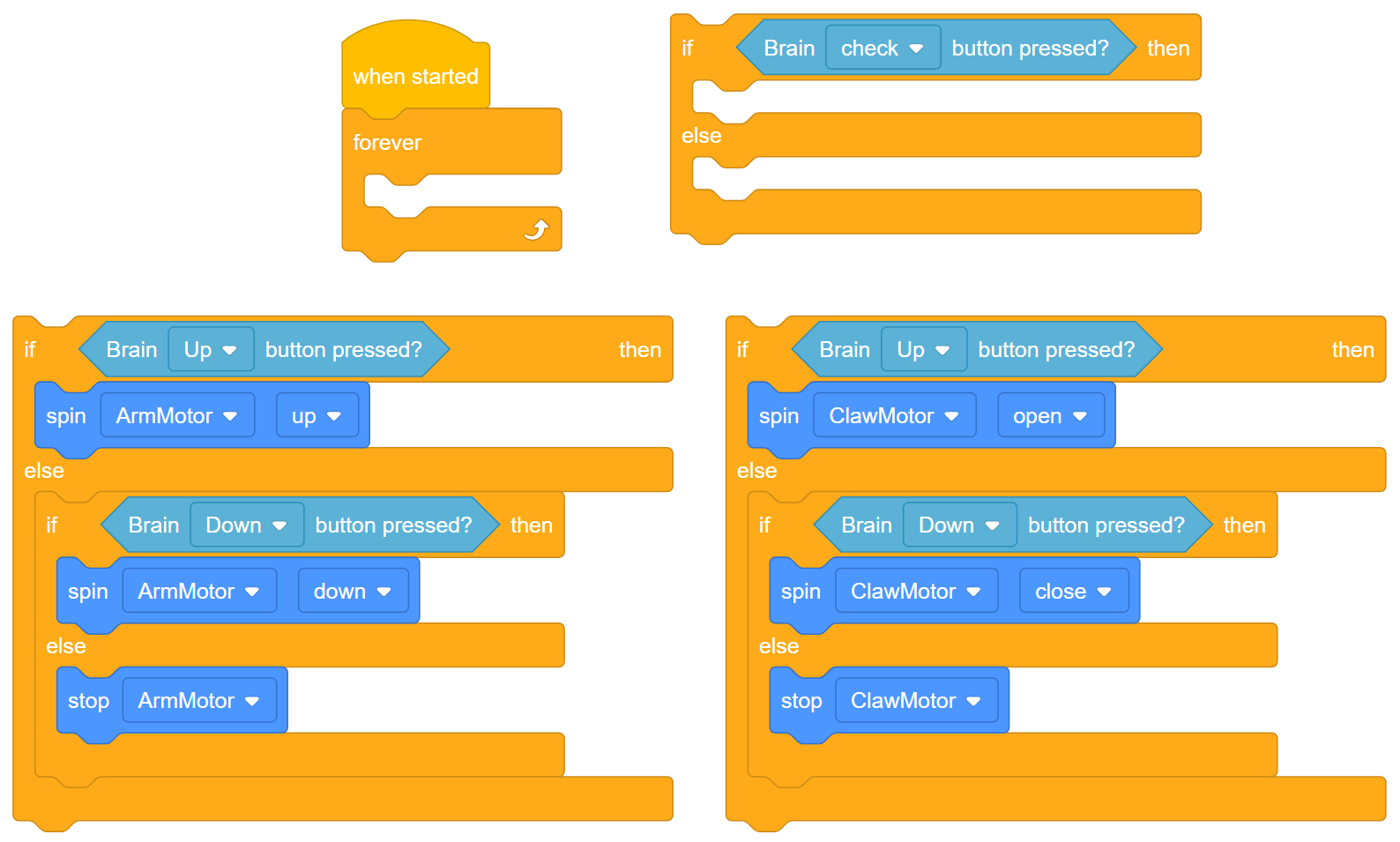
따라서 팔과 발톱 사이의 "스위처" 역할을 하는 버튼이 필요합니다. 다음 블록 개요를
사용하여 프로젝트를 구축하세요.
프로젝트를 계획할 때 엔지니어링 노트에 다음 질문에 답하십시오.
- 로봇이 무엇을 하도록 프로그래밍하고 싶으신가요? 자세한 내용을 설명하세요.
- 프로젝트에서 [If then else] 블록을 확인하려면 몇 가지 조건이 필요합니까?
힌트: 브레인 체크 버튼을 팔과 발톱 사이의 "스위처" 로 사용하십시오. 따라서 Brain Check 버튼을 길게 누르면 Brain Up 및 Down 버튼을 사용하여 암이 제어됩니다. Brain Check 버튼이 해제되면 Brain Up 및 Down 버튼을 사용하여 발톱을 제어합니다.
프로젝트를 생성할 때 다음 단계를 따르세요.
![]() 교사 도구 상자
교사 도구 상자
-
목표는 추가 프로그래밍을 추가하여 Clawbot이 Clawbot의 뇌에 있는 버튼 (들) 을 누르면 발톱을 열거나 닫도록 하는 것입니다 (즉, 하나의 버튼 또는 발톱을 열기 위한 버튼 페어링 및 발톱을 닫기 위한 다른 버튼 페어링). 뇌의 버튼을 눌러 Clawbot의 팔을 올리고 내리는 프로그래밍은 플레이 섹션에서 이미 구축되었어야 합니다.
-
이 질문은 학생들이 [If then else] 블록 안에 필요한 조건에 대해 생각하게 하기 위한 것입니다. 사용자 인터페이스를 확인하려면 다섯 가지 조건이 필요합니다. 첫 번째 조건은 확인 버튼을 눌렀는지 확인하는 것입니다. 확인 버튼을 누른 경우, 다음으로 확인해야 할 조건은 위로 버튼을 누른 경우 (조건 2) 또는 아래로 버튼을 누른 경우 (조건 3) 입니다. 확인 버튼을 누르지 않으면 프로젝트가 아래로 이동하여 위로 버튼만 눌렸는지 (조건 4) 또는 아래로 버튼이 눌렸는지 (조건 5) 확인합니다.
-
생성한 의사 코드를 사용하여 프로젝트를 개발하십시오.
-
프로젝트를 자주 테스트하고 테스트에서 배운 내용을 사용하여 반복합니다.
-
발톱 및 암 모터를 더 잘 제어하기 위해 프로젝트에 추가할 수 있는 것은 무엇입니까? 자세한 내용을 설명하세요.
-
마지막 프로젝트를 선생님과 공유하세요.
![]() 교사 팁
교사 팁
프로그래밍에 어려움을 겪고 있는 학생들에게 VEXcode IQ의 If Then Else Blocks 튜토리얼 비디오를 검토하도록 권장합니다. 또한 이 새 프로젝트의 기초로 Play의 ArmUpDown2 및 ClawUpDown 프로젝트를 사용해야 합니다. 학생들에게 참고 자료로 사용할 수 있는 잠재적으로 유용한 출처 목록이 제공되었습니다.
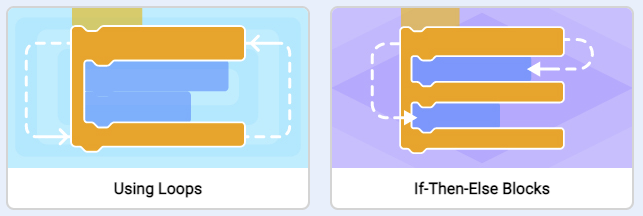
시작하는 데 문제가 있는 경우 VEXcode IQ 블록에서 다음을 검토하십시오.
- If-Then-Else 블록 또는 루프 사용 튜토리얼 비디오
- 도움말 튜토리얼 동영상 사용
- 이전 버전의 프로젝트 (ArmUpDown2 또는 ClawUpDown)

![]() 학습의 폭을 넓히세요
학습의 폭을 넓히세요
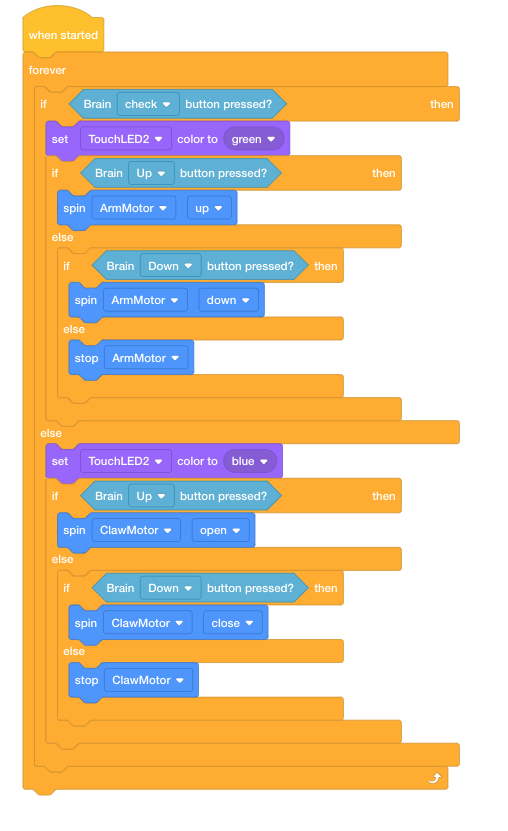
학생들에게 버튼이 팔과 발톱 사이에서 전환될 때 터치 LED를 통합하거나 로봇이 소리를 내도록 요청하십시오. 학생들은 또한 팔을 제어할 때 터치 LED가 녹색으로 켜지고 발톱을 제어할 때 파란색으로 켜질 수 있습니다.
다음은 해결 방법의 예입니다.