Progetta, sviluppa e itera il tuo progetto
In questa sezione, utilizzerai i progetti che costruisci nella sezione Gioca per creare un
progetto in grado di manipolare sia il braccio che l'artiglio.
Richiama i progetti
ArmUpDown2 e ClawUpDown.
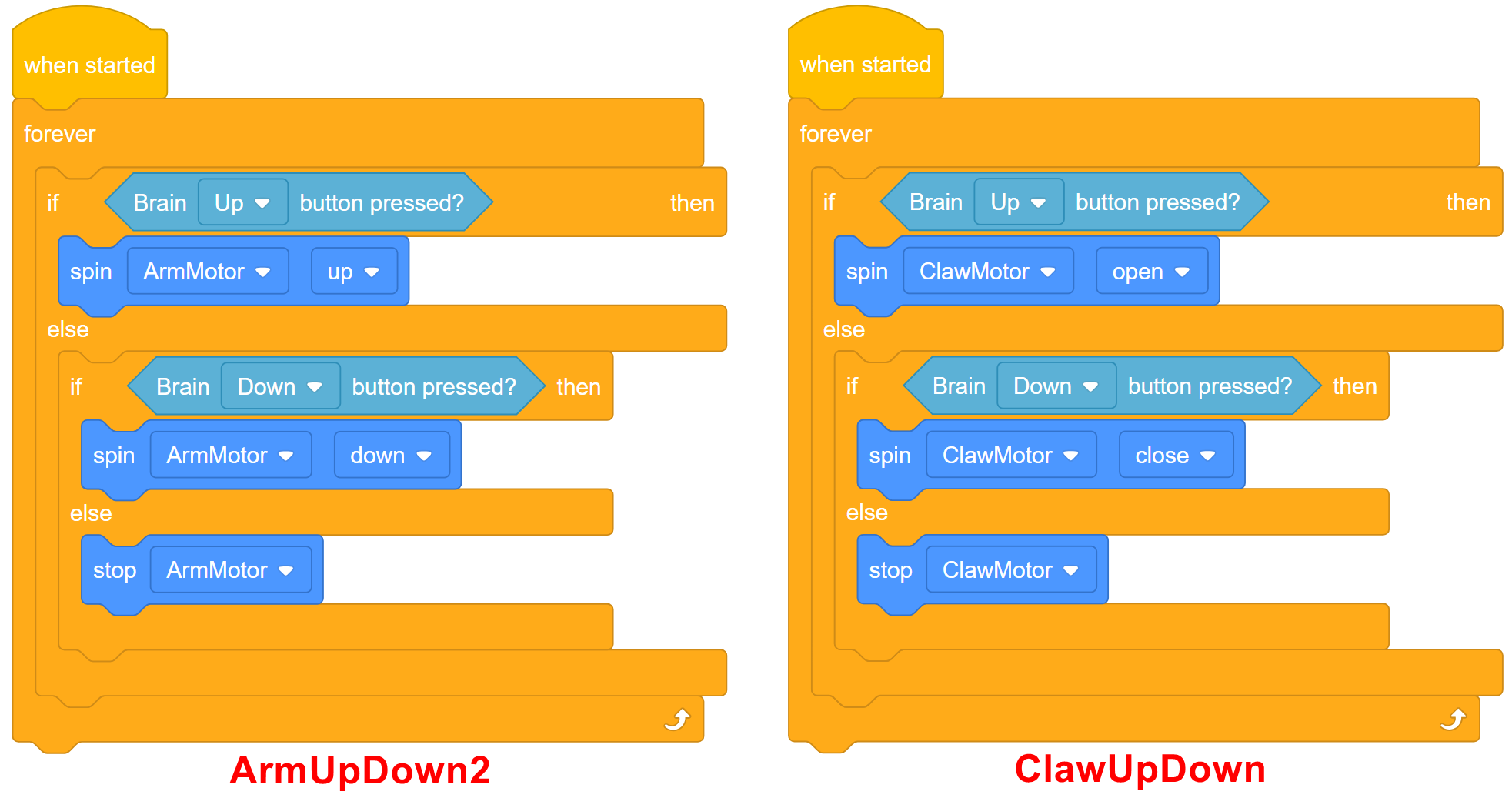
Vogliamo in qualche modo incorporare entrambi questi progetti nello stesso progetto.
Tuttavia, c'è solo un pulsante Brain Up e un pulsante Brain Down.
Pertanto, abbiamo
bisogno di un pulsante che funga da "interruttore" tra il braccio e
l'artiglio.
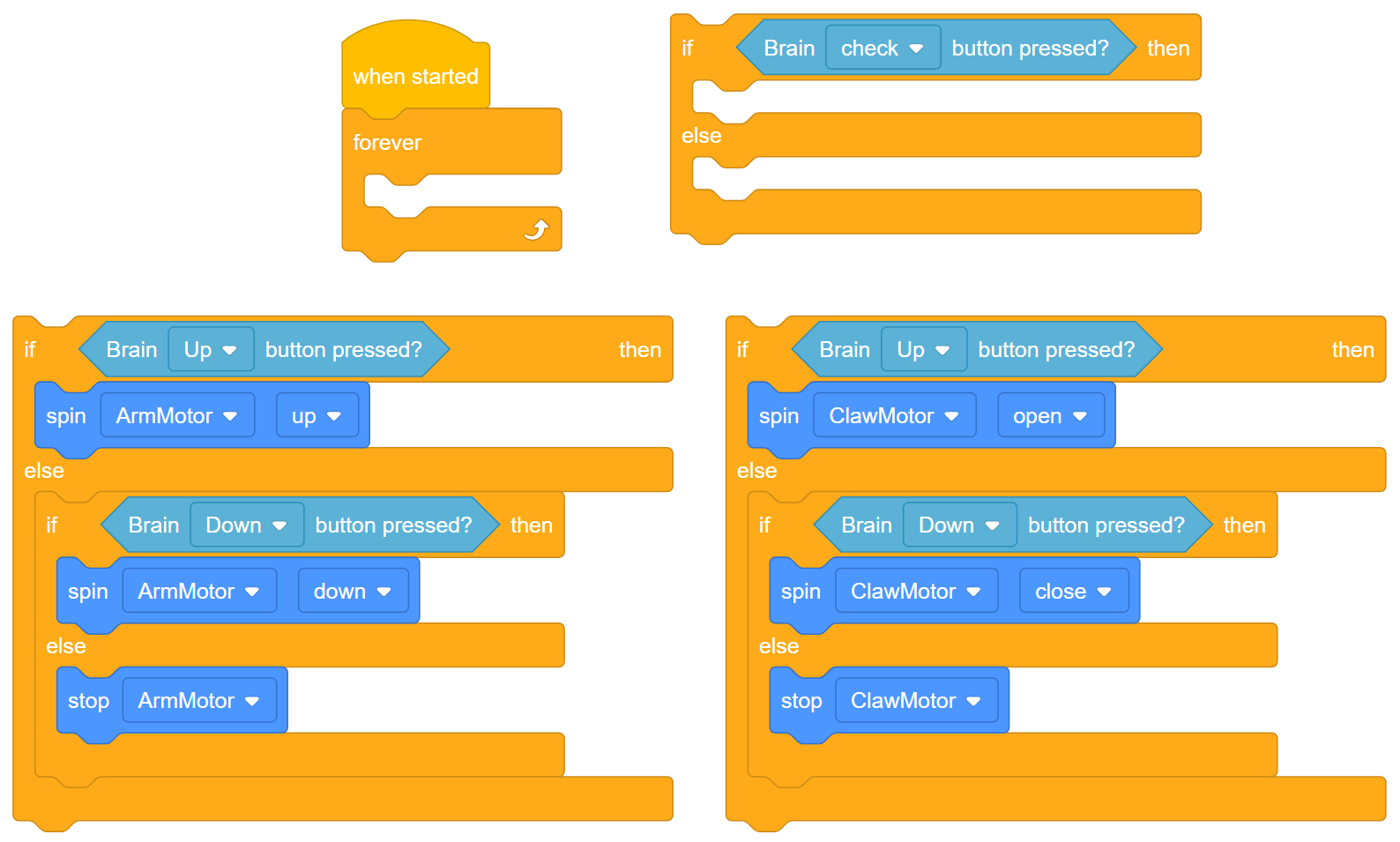
Utilizza il seguente schema di blocchi per aiutarti a costruire il tuo
progetto:
Rispondi alle seguenti domande nel tuo quaderno di ingegneria mentre pianifichi il tuo progetto:
- Cosa vuoi programmare per il robot? Spiega con i dettagli.
- Quante condizioni dovrà verificare il tuo progetto nei blocchi [If then else]?
Suggerimento: utilizzare il pulsante Brain Check come "interruttore" tra il braccio e l'artiglio. Pertanto, se si preme e si tiene premuto il pulsante Brain Check, il braccio viene controllato utilizzando i pulsanti Brain Up e Brain Down. Se il pulsante Brain Check viene rilasciato, l'artiglio viene controllato utilizzando i pulsanti Brain Up e Brain Down.
Segui i passaggi seguenti mentre crei il tuo progetto:
![]() Suggerimenti per l'insegnante
Suggerimenti per l'insegnante
-
Prima di passare alla fase successiva della programmazione, chiedi agli studenti di rivedere e valutare il loro pseudocodice seguendo i passaggi nel contesto della pressione dei pulsanti del cervello. Clicca qui (Google / .docx / .pdf) per un esempio di come potrebbe essere lo pseudocodice per questa sfida. Puoi scaricare una rubrica pseudocodice qui (Google / .docx / .pdf).
-
Ricorda agli studenti che possono utilizzare la funzione Aiuto all'interno di VEXcode IQ per saperne di più su qualsiasi blocco.
![]() Cassetta degli attrezzi per insegnanti
Cassetta degli attrezzi per insegnanti
-
L'obiettivo è aggiungere una programmazione aggiuntiva in modo che il Clawbot apra o chiuda l'artiglio premendo uno o più pulsanti sul cervello del Clawbot (ad esempio, un pulsante o un abbinamento di pulsanti per aprire l'artiglio e un altro per chiudere l'artiglio). La programmazione per alzare e abbassare il braccio del Clawbot premendo i pulsanti sul cervello dovrebbe essere già stata costruita durante la sezione Play.
-
Questa domanda ha lo scopo di far riflettere gli studenti sui condizionali necessari all'interno dei blocchi [If then else]. L'interfaccia utente richiederà il controllo di cinque condizioni. La prima condizione verificata è se si preme il pulsante Check. Se si preme il pulsante Controlla, le condizioni successive da verificare sono se si preme il pulsante Su (Condizione 2) o se si preme il pulsante Giù (Condizione 3). Se il pulsante Check non viene premuto, il progetto si sposta verso il basso per verificare se viene premuto solo il pulsante Up (Condizione 4) o se viene premuto il pulsante Down (Condizione 5).
-
Pianifica le condizioni che il tuo progetto deve verificare utilizzando disegni e pseudocodice.
-
Usa lo pseudocodice che hai creato per sviluppare il tuo progetto.
-
Metti spesso alla prova il tuo progetto e ripeti su di esso utilizzando ciò che hai imparato dai tuoi test.
-
Cosa potresti aggiungere al tuo progetto per controllare meglio i motori Claw and Arm? Spiega con i dettagli.
-
Condividi il tuo progetto finale con il tuo insegnante.
![]() Suggerimenti per l'insegnante
Suggerimenti per l'insegnante
Incoraggia gli studenti che hanno difficoltà a programmare a rivedere il video tutorial If Then Else Blocks in VEXcode IQ. Dovrebbero anche utilizzare i loro progetti ArmUpDown2 e ClawUpDown di Play come base per questo nuovo progetto. Agli studenti è stato fornito un elenco di fonti potenzialmente utili da utilizzare come riferimento.
Se hai problemi a iniziare, consulta quanto segue in VEXcode IQ Blocks:
- Video tutorial If-Then-Else Blocks o Using Loops
- Video tutorial sull'utilizzo della Guida
- Versioni precedenti del tuo progetto (ArmUpDown2 o ClawUpDown)

![]() Estendi il tuo apprendimento
Estendi il tuo apprendimento
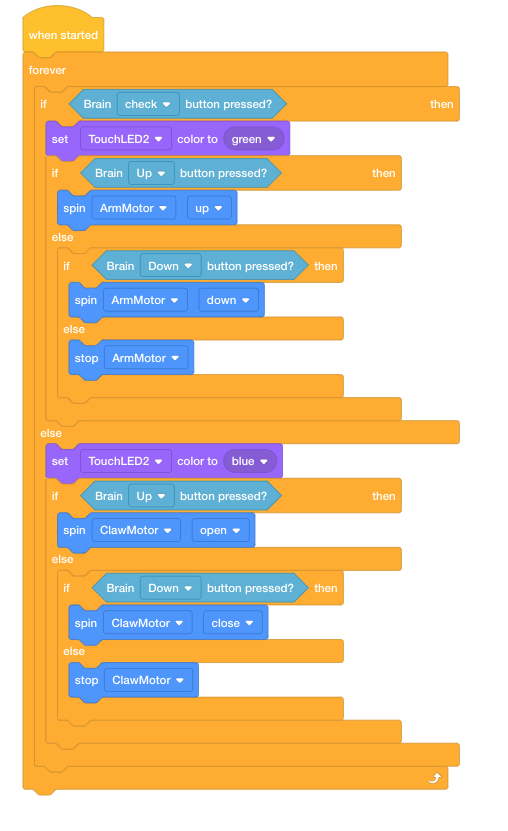
Chiedere agli studenti di incorporare il LED Touch o fare in modo che il robot emetta un
suono quando i pulsanti vengono commutati tra il braccio e l'artiglio. Gli studenti
potrebbero anche avere il LED Touch verde quando il braccio viene controllato e blu
quando l'artiglio viene controllato.
Di seguito una soluzione esemplificativa: