このセクションでは、「再生」セクションで構築したプロジェクトを使用して、腕と爪の両方を操作できるプロジェクトを作成します。
ArmUpDown2 プロジェクトと ClawUpDown プロジェクトを思い出してください。
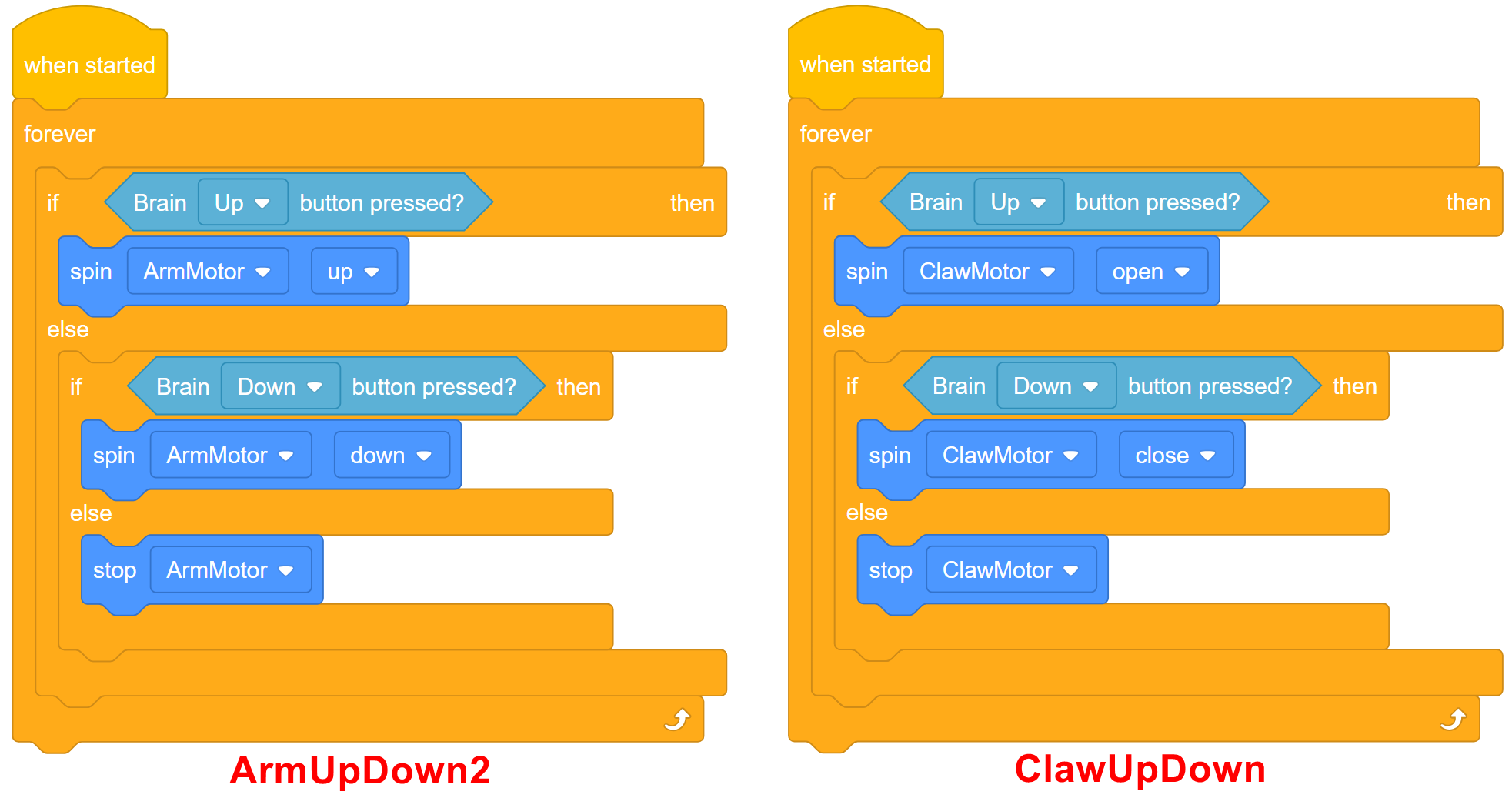
この両方のプロジェクトを何らかの方法で同じプロジェクトに組み込みたいと考えています。 ただし、Brain Up ボタンと Brain Down ボタンは 1 つだけです。
したがって、アームと爪の間の「スイッチャー」として機能するボタンが必要です。
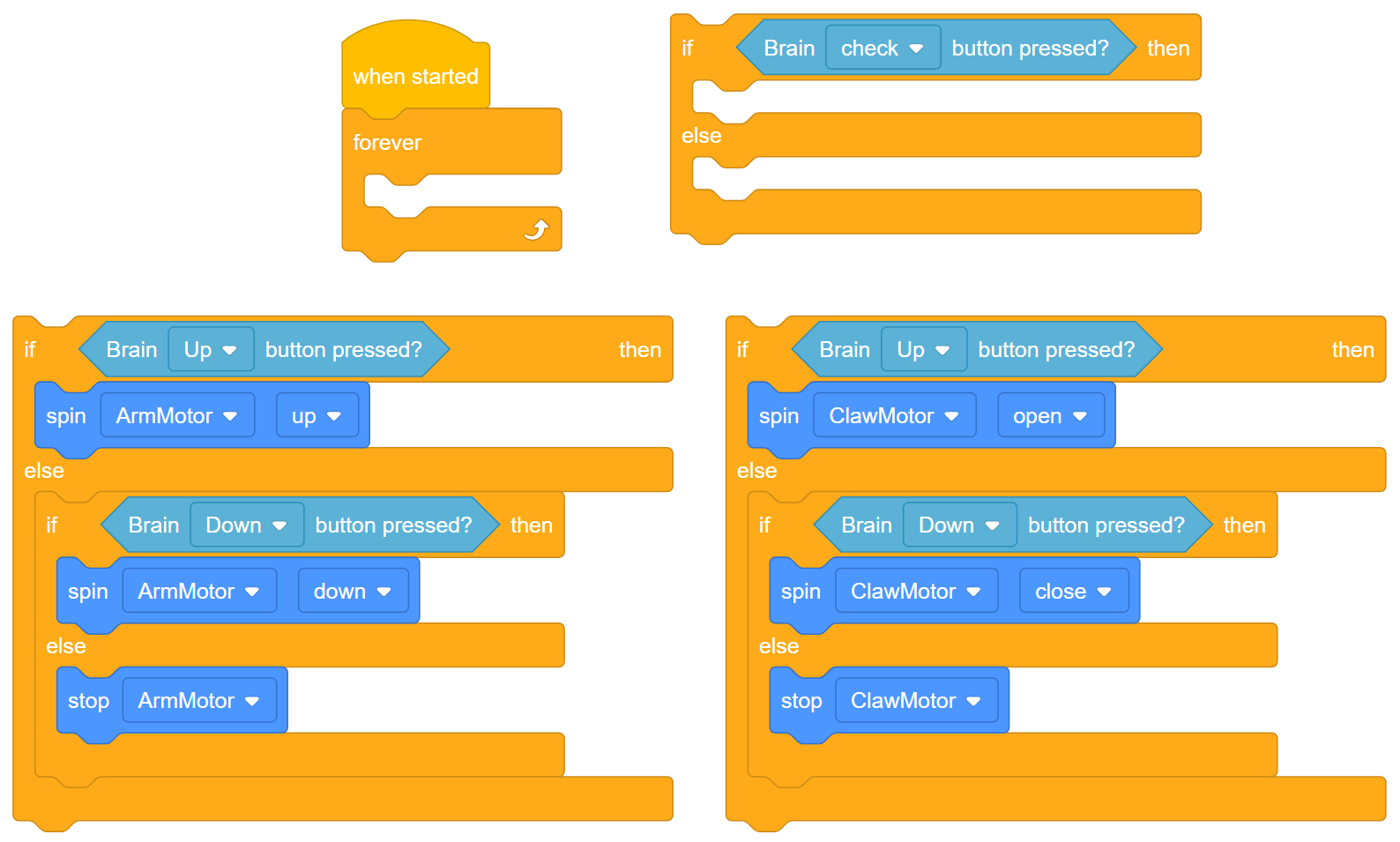
プロジェクトの構築には、次のブロックの概要を使用してください。
プロジェクトを計画する際には、エンジニアリング ノートブックで次の質問に答えてください。
-
ロボットに何をさせるようにプログラムしたいですか? 詳細を含めて説明します。
-
プロジェクトでは、[If then else] ブロックでチェックする必要がある条件がいくつありますか?
ヒント: Brain Check ボタンをアームとクローの間の「スイッチャー」として使用します。 したがって、Brain Check ボタンを押したままにすると、Brain Up および Down ボタンを使用してアームが制御されます。 Brain Check ボタンを放すと、Brain Up および Down ボタンを使用してクローが制御されます。
プロジェクトを作成するときは、次の手順に従います。
![]() 教師用ツールボックス
教師用ツールボックス
-
目的は、Clawbot の脳のボタンを押すと Clawbot が爪を開いたり閉じたりするように追加のプログラミングを追加することです (つまり、爪を開くための 1 つのボタンまたはボタンのペア、および爪を閉じるためのもう 1 つのボタン)。 脳のボタンを押して Clawbot の腕を上げ下げするためのプログラミングは、Play セクションですでに構築されているはずです。
-
この質問は、[If then else] ブロック内で必要な条件文について生徒に考えてもらうことを目的としています。 ユーザー インターフェイスでは 5 つの条件をチェックする必要があります。 最初にチェックされる条件は、「チェック」ボタンが押されたかどうかです。 Check ボタンが押された場合、次に確認する条件は、Up ボタンが押されたか (条件 2)、Down ボタンが押されたか (条件 3) です。 Check ボタンが押されていない場合、プロジェクトは下に移動し、Up ボタンのみが押されたか (条件 4)、Down ボタンが押されたか (条件 5) を確認します。
-
図面と 疑似コードを使用して、プロジェクトがチェックする必要がある条件を計画します。
-
作成した疑似コードを使用してプロジェクトを開発します。
-
プロジェクトを頻繁にテストし、テストから学んだことを使用してプロジェクトを繰り返します。
-
クローモーターとアームモーターをより適切に制御するには、プロジェクトに何を追加できますか? 詳細を含めて説明します。
-
最終的なプロジェクトを教師と共有します。
![]() 教師へのヒント
教師へのヒント
プログラミングに問題がある学生には、VEXcode IQ の If then Else Blocks チュートリアル ビデオを復習するよう勧めてください。 また、Play の ArmUpDown2 および ClawUpDown プロジェクトをこの新しいプロジェクトの基礎として使用する必要があります。 学生には、参考として使用できる可能性のある情報源のリストが提供されます。
開始に問題がある場合は、VEXcode IQ ブロックの以下を確認してください。
-
Loops を使用した If-Then-Else ブロック または チュートリアル ビデオ
-
Help チュートリアル ビデオの使用
-
プロジェクトの以前のバージョン (ArmUpDown2 または ClawUpDown)

![]() 学習の幅を広げる
学習の幅を広げる
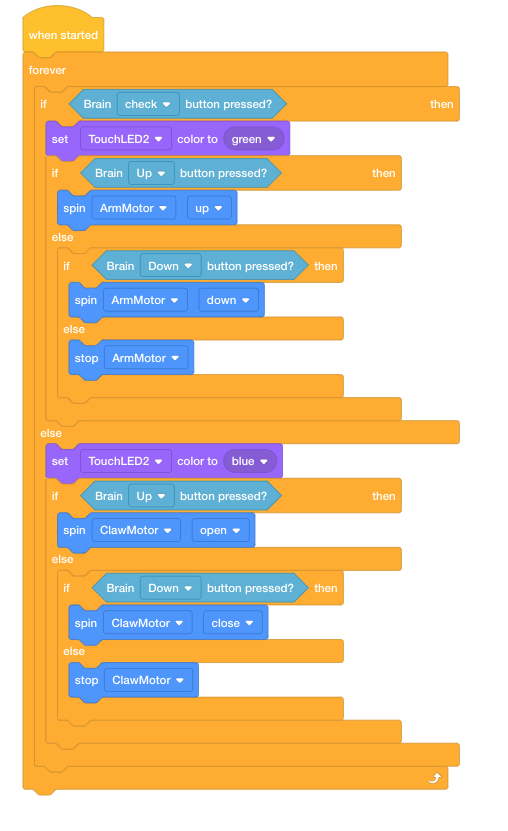
生徒に、タッチ LED を組み込むか、腕と爪の間でボタンを切り替えたときにロボットが音を鳴らすように指示します。 生徒は、腕が制御されている場合はタッチ LED が緑色に点灯し、爪が制御されている場合は青色に点灯するようにすることもできます。
以下は解決策の例です。