Projetar, desenvolver e iterar o seu projeto
Nesta secção, utilizará os projetos que construir na secção Reproduzir para criar um projeto
que possa manipular tanto o braço como a garra.
Lembre-se dos projetos ArmUpDown2 e
ClawUpDown.
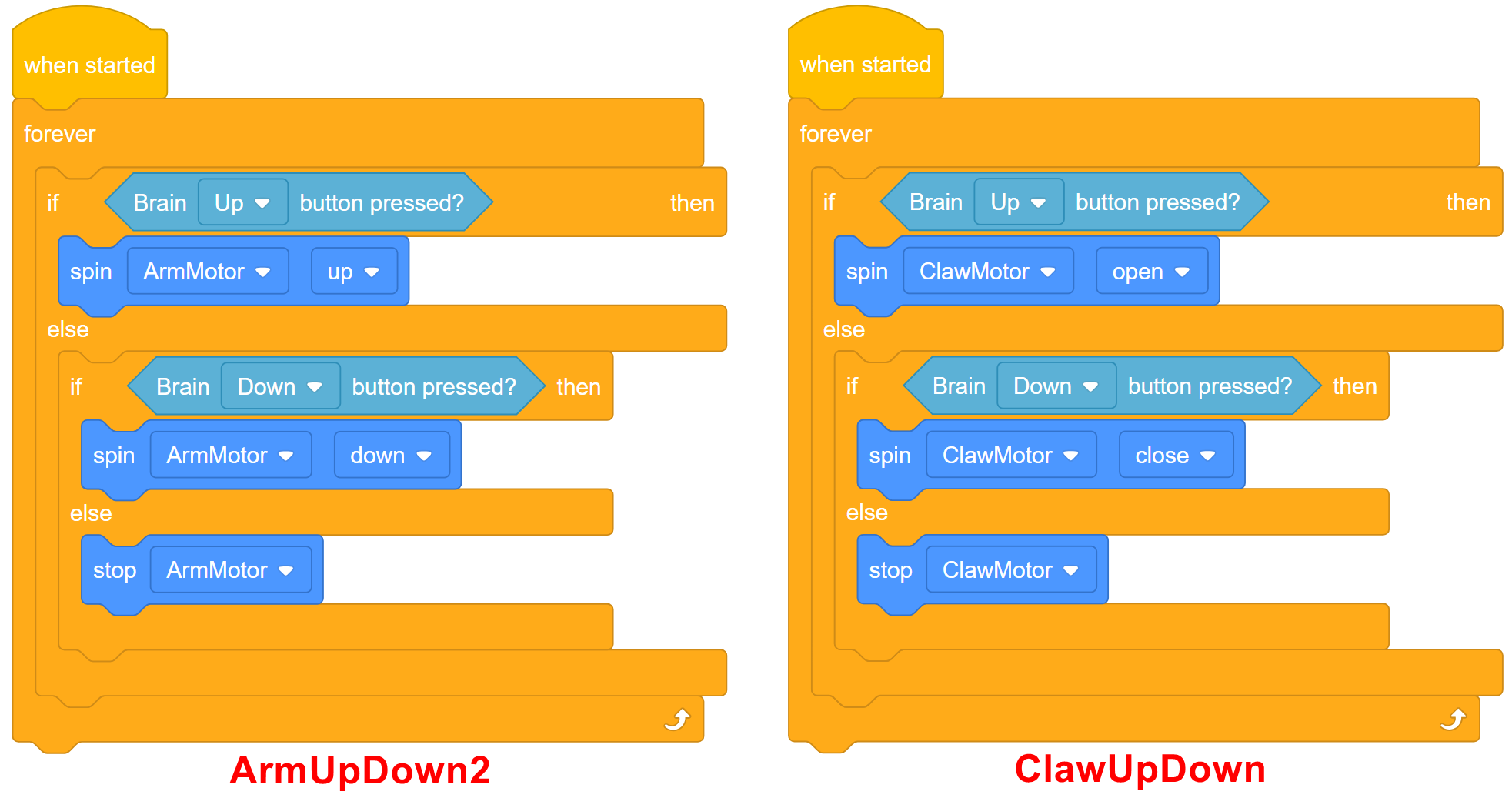
Queremos de alguma forma incorporar ambos os projetos no mesmo projeto. No entanto, há apenas
um botão Brain Up e um botão Brain Down.
Assim, precisamos de um botão para atuar
como um "switcher" entre o braço e a garra.
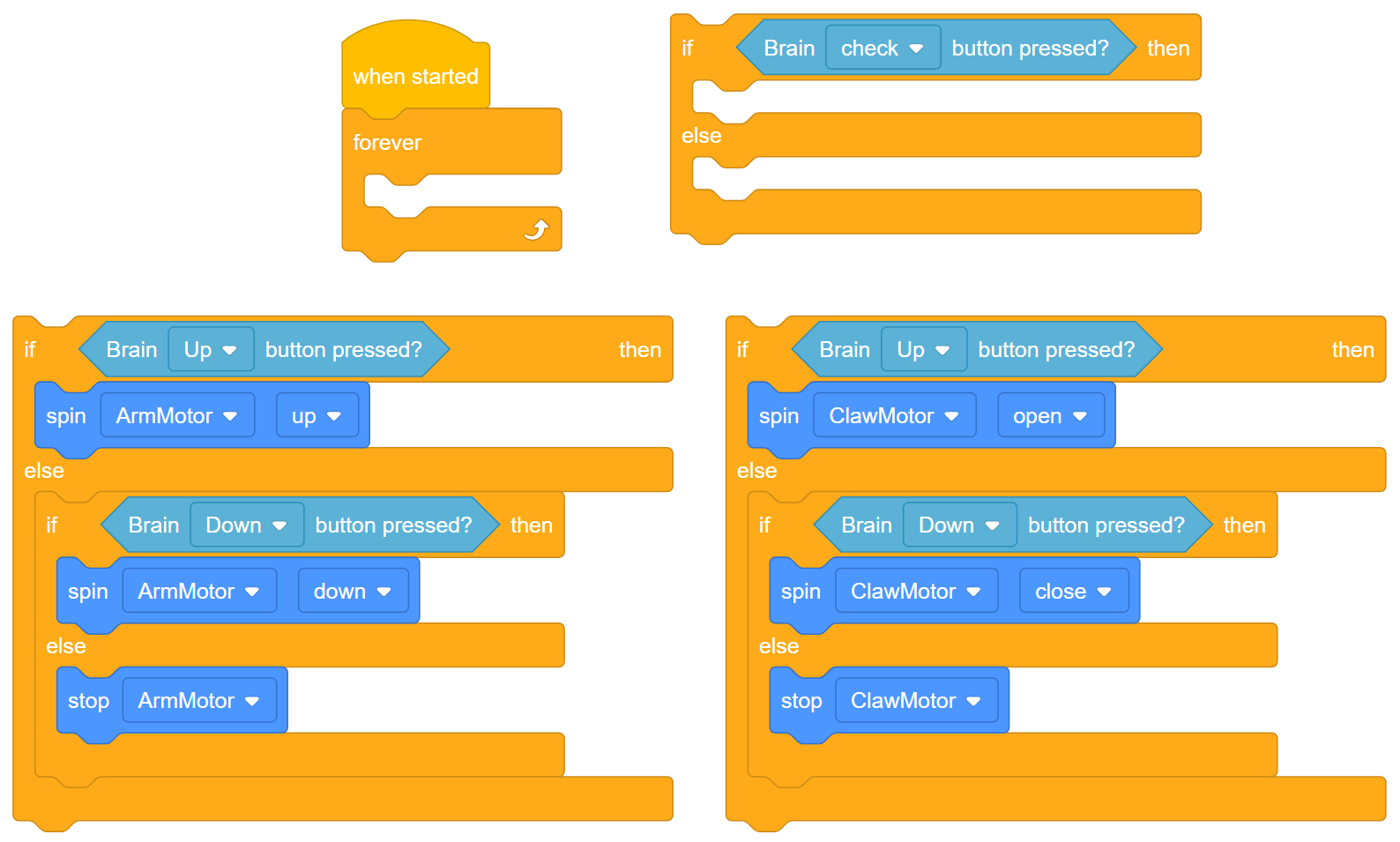
Use o seguinte esboço de blocos para
ajudá-lo a construir o seu projeto:
Responda às seguintes perguntas no seu caderno de engenharia enquanto planeia o seu projeto:
- O que você deseja programar o robô para fazer? Explique com detalhes.
- Quantas condições o seu projeto precisará verificar nos blocos [If then else]?
Dica: Use o botão Brain Check como o "switcher" entre o braço e a garra. Assim, se o botão Brain Check for pressionado e mantido, o braço é controlado usando os botões Brain Up e Down. Se o Botão de Verificação do Cérebro for liberado, a garra é controlada usando os botões Cérebro para Cima e Cérebro para Baixo.
Siga os passos abaixo ao criar o seu projeto:
![]() Dicas para Professores
Dicas para Professores
-
Antes de passar para a próxima etapa da programação, peça aos alunos que revisem e avaliem seu pseudocódigo seguindo as etapas no contexto de pressionar os botões do cérebro. Clique aqui (Google / .docx / .pdf) para obter um exemplo de como o pseudocódigo pode ser para este desafio. Você pode baixar uma rubrica de pseudocódigo aqui (Google / .docx / .pdf).
-
Lembre aos alunos que eles podem usar o recurso Ajuda dentro do VEXcode IQ para aprender mais sobre qualquer bloco.
![]() Caixa de Ferramentas do Professor
Caixa de Ferramentas do Professor
-
O objetivo é adicionar programação adicional para que o Clawbot abra ou feche a garra pressionando um botão no cérebro do Clawbot (ou seja, um botão ou emparelhamento de botões para abrir a garra e outro para fechar a garra). A programação para levantar e abaixar o braço do Clawbot pressionando botões no cérebro já deveria ter sido construída durante a seção Reproduzir.
-
Esta pergunta destina-se a fazer com que os alunos pensem sobre as condicionais necessárias dentro dos blocos [If then else]. A Interface do Usuário exigirá que cinco condições sejam verificadas. A primeira condição verificada é se o botão Verificar está pressionado. Se o botão Verificar for pressionado, as próximas condições a serem verificadas são se o botão Para cima está pressionado (Condição 2) ou se o botão Para baixo está pressionado (Condição 3). Se o botão Verificar não for pressionado, o projeto se move para baixo para verificar se apenas o botão Para cima está pressionado (Condição 4) ou se o botão Para baixo está pressionado (Condição 5).
-
Planeie as condições que o seu projeto precisa de verificar usando desenhos e pseudocódigo.
-
Use o pseudocódigo que criou para desenvolver o seu projeto.
-
Teste o seu projeto com frequência e faça iterações nele usando o que aprendeu com os testes.
-
O que você poderia adicionar ao seu projeto para controlar melhor os motores de garras e braços? Explique com detalhes.
-
Partilhe o seu projeto final com o seu professor.
![]() Dicas para Professores
Dicas para Professores
Incentive os alunos que estão tendo problemas para programar a rever o vídeo tutorial If Then Else Blocks no VEXcode IQ. Eles também devem usar seus projetos ArmUpDown2 e ClawUpDown da Play como base para este novo projeto. Os alunos receberam uma lista de fontes potencialmente úteis para usar como referências.
Se estiver com problemas para começar, consulte o seguinte em VEXcode IQ Blocks:
- Vídeos tutoriais If-Then-Else Blocks ou Using Loops
- Usando o vídeo do tutorial de Ajuda
- Versões anteriores do seu projeto (ArmUpDown2 ou ClawUpDown)

![]() Estenda a sua aprendizagem
Estenda a sua aprendizagem
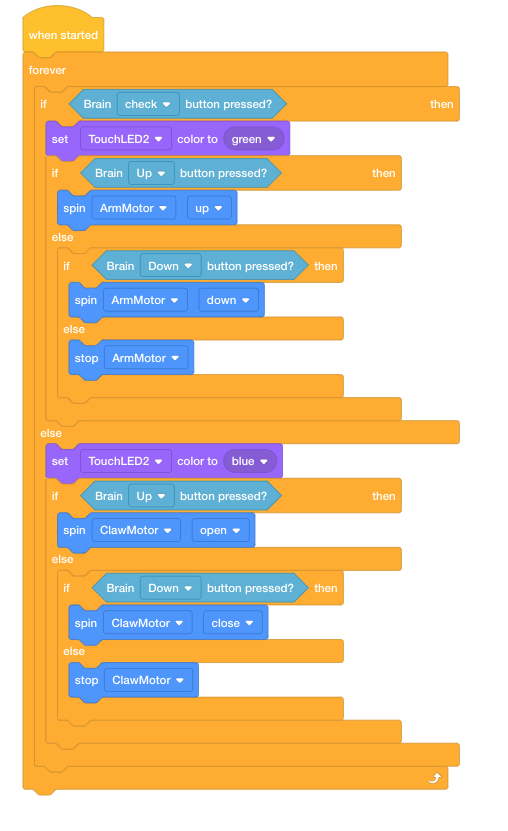
Peça aos alunos que incorporem o LED de toque ou peça ao robô que toque um som quando os
botões forem alternados entre o braço e a garra. Os alunos também podem fazer com
que o LED de toque acenda em verde quando o braço estiver sendo controlado e acenda em
azul quando a garra estiver sendo controlada.
A seguir está um exemplo de
solução: