

업 앤 오버
6 수업
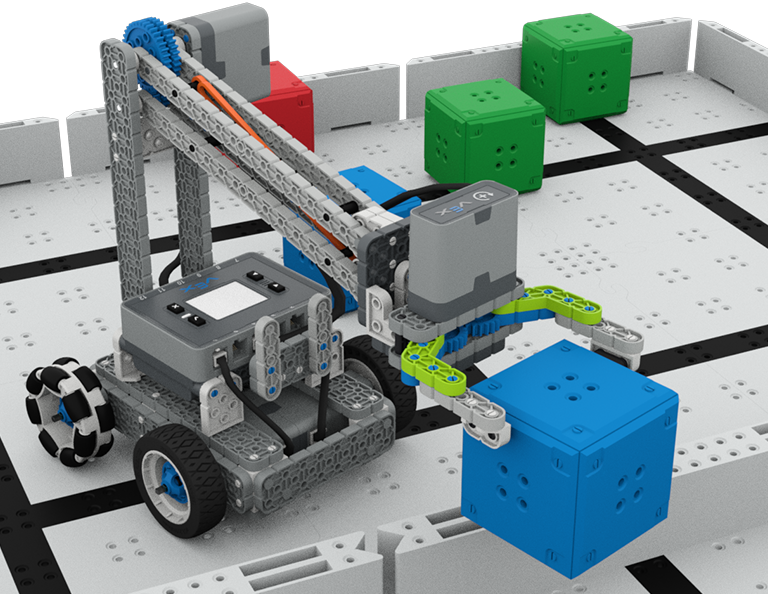
이 단원에서는 업 앤 오버 경쟁에서 필드의 한쪽에서 다른 쪽으로 큐브를 모으고, 집어 올리고, 옮기는 클로봇을 디자인하는 방법을 알아봅니다!
업 앤 오버 레슨 의 내용과 진행에 관한 교사 지원 자료와 비디오를 보려면 교사 포털을 방문하십시오.

수업 1: 소개
이 수업에서는 Up and Over 대회에 대해 알아보고, 배터리와 컨트롤러를 설정하고, 코딩을 준비하고, Clawbot을 만드는 방법을 알아봅니다.
2과: 클로 디자인
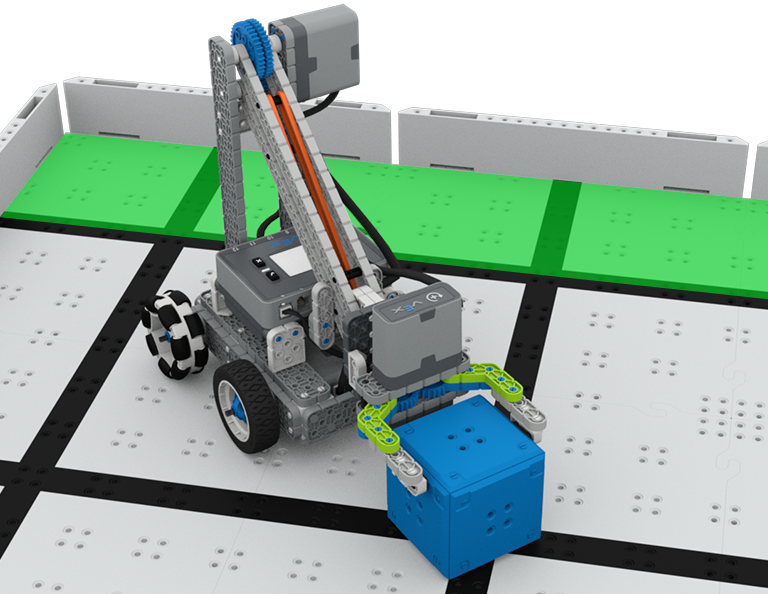
이 수업에서는 클로가 무엇인지, 효과적인 클로가 어떻게 작동하는지, 스카우팅이 팀의 디자인과 전략에 어떻게 도움이 될 수 있는지 알아봅니다. 그런 다음 Grab and Go 챌린지에서 배운 내용을 적용해 보세요.
3과: 팔 디자인
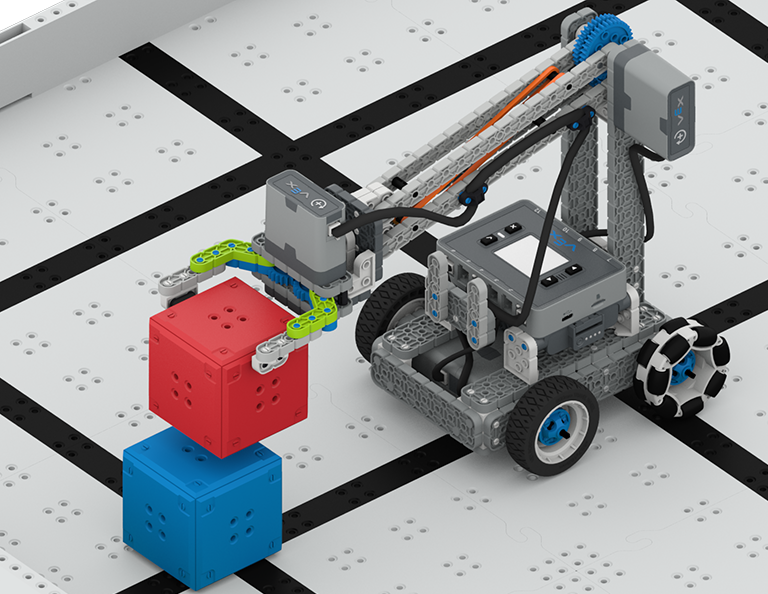
이 수업에서는 로봇 팔의 다양한 요소, 작동 원리, 효과적인 팔 설계에 대해 알아보고, Stacked Up 챌린지에서 1분 안에 최대한 많은 큐브를 쌓는 방법을 익힙니다.
수업 4: 운동 그룹
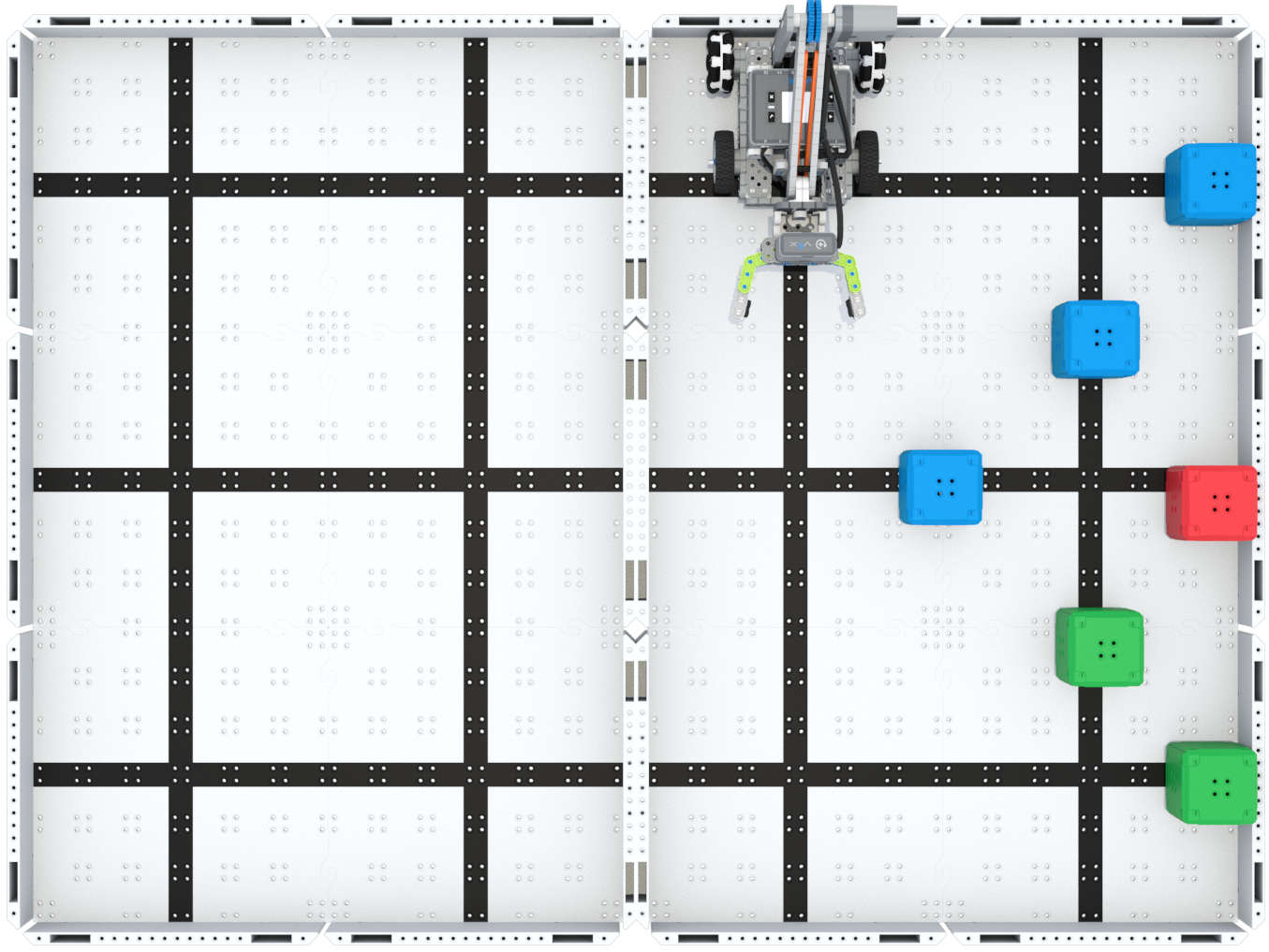
이 수업에서는 모터 그룹이 무엇인지, 모터 그룹이 어떻게 도움이 되는지, 그리고 VEXcode IQ에서 모터 그룹을 구성하여 로봇을 반복하여 Up and Over 챌린지를 완료하는 방법을 알아봅니다.
5과: 업 앤 오버 경쟁
이번 수업에서는 이전 수업에서 배운 내용을 적용하여 업 앤 오버 경쟁에 참여해 보세요!

6과: 결론
이 수업에서는 단원을 되돌아보고 여러분이 한 일과 STEM 경력 사이의 연관성을 파악합니다.