
पाठ 4: प्रत्येक रंग की एक डिस्क को हिलाना
प्रत्येक रंग की एक डिस्क को स्थानांतरित करने के लिए एक परियोजना की योजना बनाना
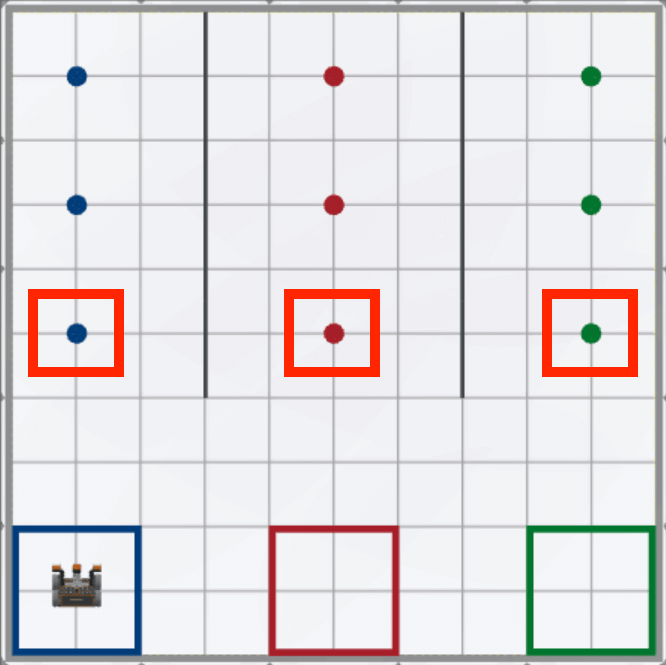
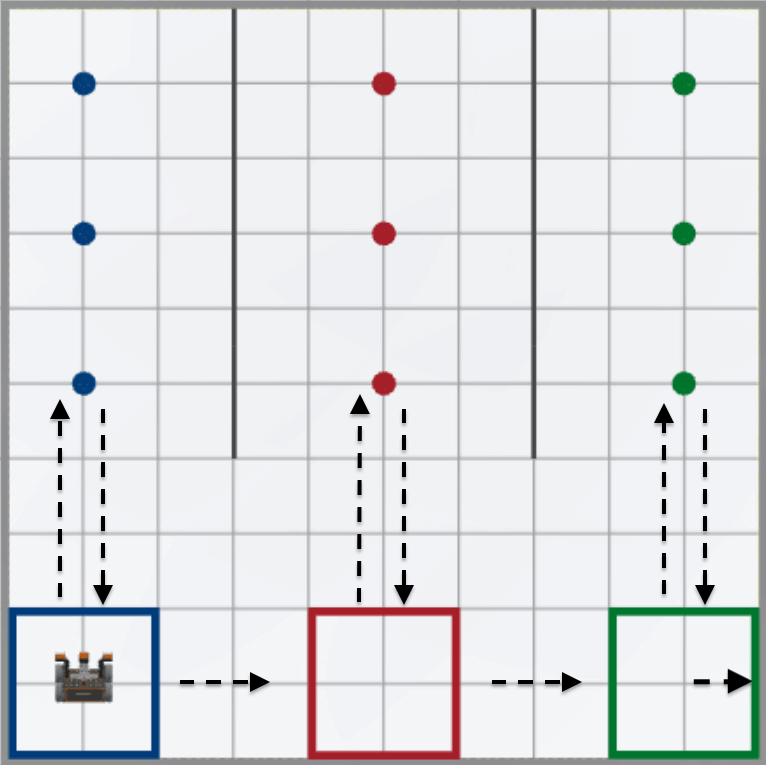
पाठ 3 में, आपने एक प्रोजेक्ट बनाया था जिसमें VR रोबोट को तीन नीली डिस्कों में से प्रत्येक को उठाकर डिस्क मूवर प्लेग्राउंडपर नीले गोल में छोड़ना था। इस पाठ में, अब आप डिस्क मूवर प्लेग्राउंडमें प्रत्येक रंग की एक डिस्क को उठाकर उसके संगत रंगीन लक्ष्य में ले जाने के लिए एक प्रोजेक्ट बनाएंगे!
तीन डिस्क को स्थानांतरित करने के लिए कौन से व्यवहार की आवश्यकता है?
-
सबसे पहले, वीआर रोबोट को एक डिस्क एकत्र करने में सक्षम होना चाहिए। वी.आर. रोबोट को डिस्क तक जाने, उसे उठाने, घूमने, तथा फिर प्रत्येक रंग के लिए रंगीन लक्ष्य तक वापस जाने के व्यवहार को एक बार दोहराना होगा। वीआर रोबोट द्वारा प्रत्येक रंग की एक डिस्क को उठाने और छोड़ने की क्रिया को दोहराने के लिए, वीआर रोबोट को निम्नलिखित व्यवहार तीन बार करने की आवश्यकता होगी:
- जब तक डाउन आई सेंसर द्वारा डिस्क का पता न लग जाए, तब तक ड्राइव करें, डिस्क को उठाएं, लक्ष्य की ओर मुड़ें, और डिस्क को छोड़ने के लिए डिस्टेंस सेंसर का उपयोग करते हुए लक्ष्य की ओर ड्राइव करें।
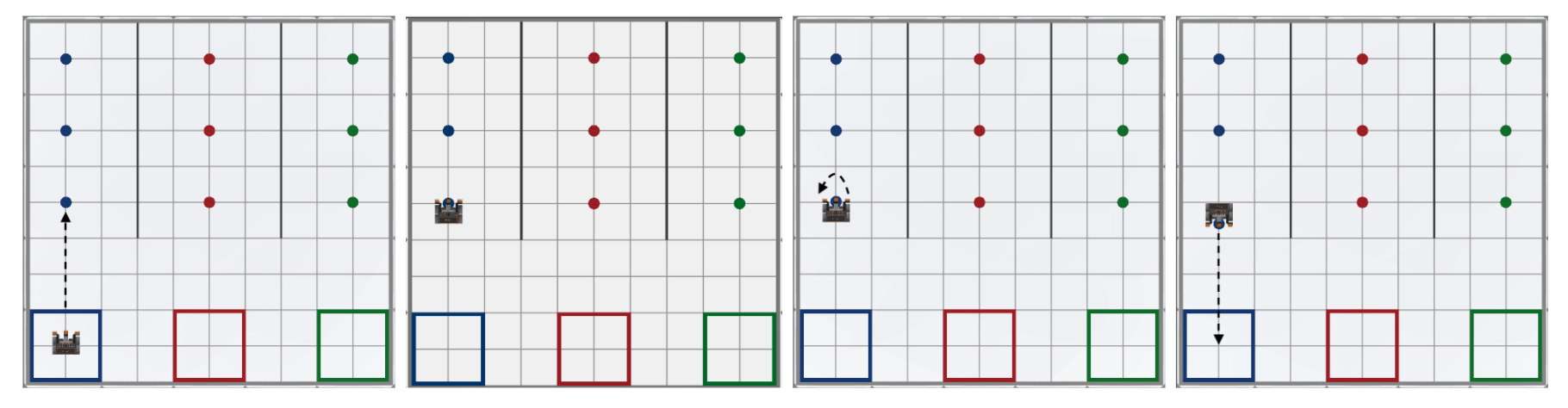
- जब तक डाउन आई सेंसर द्वारा डिस्क का पता न लग जाए, तब तक ड्राइव करें, डिस्क को उठाएं, लक्ष्य की ओर मुड़ें, और डिस्क को छोड़ने के लिए डिस्टेंस सेंसर का उपयोग करते हुए लक्ष्य की ओर ड्राइव करें।
- हालाँकि, पहली नीली डिस्क एकत्र करने के बाद, वीआर रोबोट को पहली लाल डिस्क एकत्र करने के लिए डिस्क मूवर प्लेग्राउंडके अगले भाग की ओर ड्राइव करना होगा।
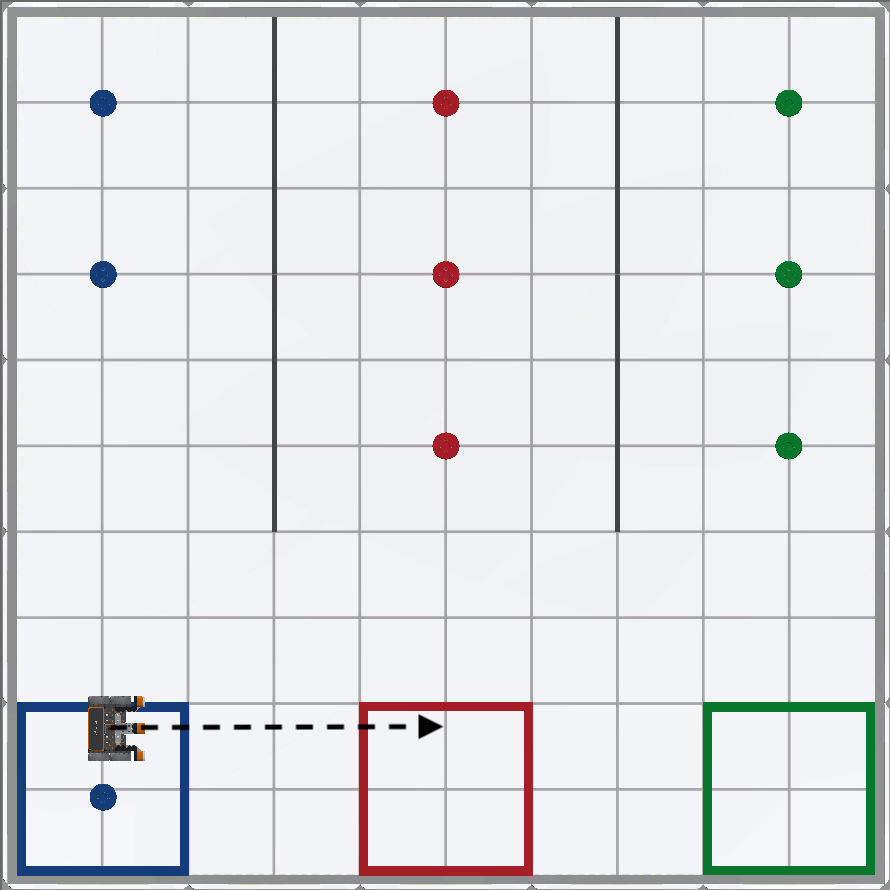
- फिर यह डिस्कों की ओर मुड़ जाएगा, ताकि यह पहली लाल डिस्क को चलाने और इकट्ठा करने के लिए तैयार हो जाए, जैसा कि इसने नीली डिस्क के साथ किया था।
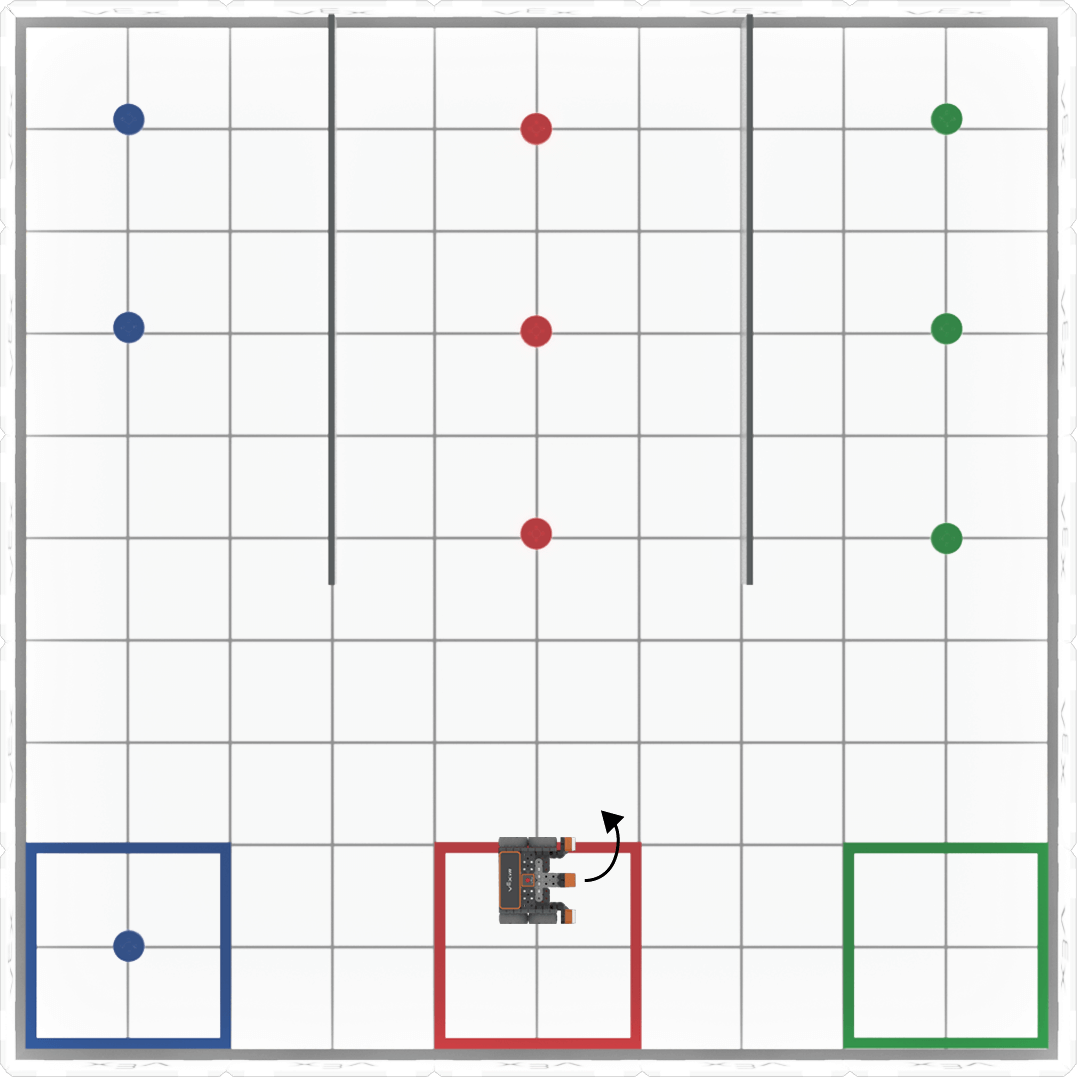
- इन सभी व्यवहारों के साथ, वीआर रोबोट प्रत्येक रंग की पहली डिस्क को इकट्ठा करने और व्यवहारों को दोहराने के लिए नेस्टेड लूप का उपयोग करके इसे संबंधित लक्ष्य पर वापस लाने में सक्षम होगा।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।