
अभ्यास
पिछले अनुभाग में, आपने अपने रोबोट को चलाने के लिए स्वायत्त और ड्राइवर नियंत्रण कार्यक्रमों का उपयोग करने के बारे में सीखा। आपने यह भी सीखा कि EXP ब्रेन पर विभिन्न स्लॉट्स में एकाधिक प्रोजेक्ट्स को कैसे डाउनलोड किया जाए और यह कैसे उपयोगी हो सकता है। अब, आप स्कोरिंग कौशल अभ्यास गतिविधि को पूरा करने के लिए जो कुछ भी सीखा है उसे लागू करने जा रहे हैं।
इस गतिविधि का लक्ष्य यह है कि आपका रोबोट दो 30-सेकेंड की दौड़ में एक मध्यम पोस्ट पर दो रिंग बनाए: एक चालक नियंत्रण, और एक स्वायत्त। नीचे दिए गए वीडियो को देखें कि आप स्कोरिंग कौशल अभ्यास गतिविधि को पूरा करने के लिए जो सीखा है उसे कैसे लागू कर सकते हैं।
अब स्कोरिंग कौशल अभ्यास गतिविधि को पूरा करने की आपकी बारी है!
इस एनीमेशन में, रोबोट पहले स्वचालित रूप से 30 सेकंड में मध्यम पोस्ट पर दो रिंगों को एकत्रित करता है और स्कोर करता है। इसके बाद, यह ड्राइवर नियंत्रण रन दिखाता है, जहां रोबोट 30 सेकंड में दोनों रिंग प्राप्त कर लेता है। स्कोरिंग कौशल अभ्यास गतिविधि को पूरा करने के लिए आपका रोबोट किस संभावित पथ का अनुसरण कर सकता है, यह देखने के लिए इस एनीमेशन को देखें।
नीचे दिए गए वीडियो में, क्लॉबोट मैदान के बाईं ओर है, और उसका सामना फील्ड टाइल के केंद्र में लगे एक मध्यम आकार के पोस्ट से है, जो रोबोट से चार पंक्तियों की दूरी पर दाहिनी दीवार के पास है। मैदान पर दो रिंग्स हैं। पहला, दूसरे और तीसरे टाइलों के बीच शीर्ष फील्ड दीवार के सामने है, और दूसरा, पहले वाले के ठीक विपरीत, नीचे फील्ड दीवार के सामने है। फील्ड के ऊपर 30 सेकंड पर एक स्टॉपवॉच सेट है, साथ ही एक ब्रेन आइकन भी है जो दर्शाता है कि यह चुनौती का स्वायत्त हिस्सा है। वीडियो तीन से उल्टी गिनती के साथ शुरू होता है, और क्लॉबोट एक समय में एक अंगूठी उठाता है, और उसे पोस्ट पर रखता है। स्टॉपवॉच रुक जाती है और 13:24 का समय दिखाती है। इसके बाद आइकन कंट्रोलर पर स्विच हो जाता है और स्टॉपवॉच रीसेट हो जाती है, जो ड्राइवर नियंत्रण रन को दर्शाता है। क्लॉबोट ने घड़ी में 6:04 सेकंड शेष रहते हुए दोनों छल्लों को उठाकर पोस्ट पर रख दिया।
इस गतिविधि को पूरा करने के लिए इस दस्तावेज़ में दिए गए चरणों का पालन करें। Google / .docx / .pdf
जैसे ही आप स्कोरिंग कौशल अभ्यास गतिविधि पूरी कर लें, अपने निष्कर्षों को अपनी इंजीनियरिंग नोटबुक में दर्ज करें।
- प्रत्येक परीक्षण को पूरा करने के लिए आपके रोबोट को किस प्रकार चलना चाहिए, यह दर्शाने के लिए एक चित्र बनाएं।
- दोनों रन के लिए गतिविधि को पूरा करने के लिए आवश्यक चरणों की सूची बनाएं: चालक नियंत्रण और स्वायत्त।
- जब आप अपना प्रोजेक्ट चलाएं, तो इस बात पर ध्यान दें कि आप कोड या अपने ड्राइवर नियंत्रण रणनीति में किस प्रकार सुधार कर सकते हैं।
- प्रत्येक पुनरावृत्ति के बाद आपके द्वारा किए गए परिवर्तनों का दस्तावेजीकरण करें।
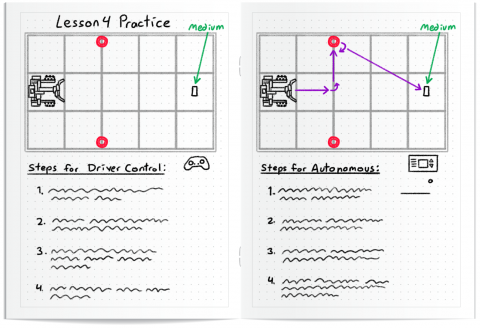
अपने परिणाम कैसे रिकॉर्ड करें, इसके उदाहरण के लिए इस चित्र को देखें।
चुनौती के लिए तैयार रहें
प्रतिस्पर्धा (अगले पृष्ठ पर) में, आप स्प्लिट डिसीजन चैलेंज में दो 30-सेकंड रन - एक स्वचालित और दूसरा ड्राइवर नियंत्रण का उपयोग करके - के साथ मैच खेलकर मध्यम पोस्ट पर रिंग्स को जितनी जल्दी हो सके पकड़ेंगे, ले जाएंगे और स्कोर करेंगे। स्प्लिट डिसीजन चैलेंज में प्रतिस्पर्धा करने का तरीका जानने के लिए नीचे दिए गए दस्तावेज़ और एनीमेशन को देखें। फिर अपनी समझ की जाँच करें प्रश्नों को पूरा करें और चुनौती के लिए अभ्यास करें।
इस चुनौती का लक्ष्य दो बार में सबसे तेज समय में एक मध्यम पोल पर चार रिंगों को पकड़ना, चलाना और स्कोर करना है - एक बार स्वायत्त कोडिंग का उपयोग करके, और दूसरा ड्राइवर नियंत्रण का उपयोग करके।
नीचे दिए गए वीडियो में क्लॉबोट मैदान के बाईं ओर है। मैदान पर चार रिंग्स हैं। मैदान के शीर्ष के पास, पहला दूसरे और तीसरे टाइल के बीच, दूसरा तीसरे और चौथे टाइल के बीच। मैदान के निचले भाग के पास, तीसरा वाला दूसरे और तीसरे टाइलों के बीच, चौथा वाला तीसरे और चौथे टाइलों के बीच। मैदान के बीच में, दाहिनी ओर एक एकल पोस्ट है। वीडियो उल्टी गिनती से शुरू होता है: 3, 2, 1. क्लॉबोट दूसरे और तीसरे टाइल तक जाता है और फिर पहले रिंग की ओर बढ़ता है, तथा उसे उठा लेता है। फिर वह पीछे हटता है और अपना पंजा ऊपर उठाता है। इसके बाद, वह खंभे की ओर बढ़ता है और पंजा छोड़ देता है, जिससे अंगूठी खंभे पर गिर जाती है। फिर वीडियो में एक कट आता है जब चार में से तीन रिंग्स पोस्ट के स्थान पर आ जाती हैं। क्लॉबोट पीछे हटता है और पंजे को नीचे करता है, चौथी अंगूठी उठा लेता है। इसके बाद यह नियंत्रण चालक के हाथ में चला गया। वीडियो उल्टी गिनती से शुरू होता है: 3, 2, 1. क्लॉबोट दूसरे और तीसरे टाइल तक जाता है और फिर पहले रिंग की ओर बढ़ता है, तथा उसे उठा लेता है। फिर वह पीछे हटता है और अपना पंजा ऊपर उठाता है। इसके बाद, वह खंभे की ओर बढ़ता है और पंजा छोड़ देता है, जिससे अंगूठी खंभे पर गिर जाती है। फिर वीडियो में एक कट आता है जब चार में से तीन रिंग्स पोस्ट के स्थान पर आ जाती हैं। क्लॉबोट पीछे हटता है और पंजे को नीचे कर देता है, तथा दूसरी अंगूठी उठाने की कोशिश करता है, लेकिन समय समाप्त हो जाता है। अंतिम स्कोर ऑटोनोमस स्कोर 9 और ड्राइवर नियंत्रण स्कोर 9 है, जिसका कुल स्कोर 18 है।
यह सिर्फ एक उदाहरण है कि एक रोबोट स्प्लिट डिसीजन चुनौती गतिविधि में कैसा प्रदर्शन कर सकता है।
इस गतिविधि को पूरा करने के तरीके के बारे में अधिक जानने के लिए इस दस्तावेज़ में दिए गए चरणों का पालन करें। Google / .docx / .pdf
अपनी समझ की जाँच करें
चुनौती शुरू करने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में प्रश्नों के उत्तर देकर चुनौती के नियमों और सेटअप को समझते हैं।
अपनी समझ की जाँच करें प्रश्न Google / .docx / .pdf
प्रश्नों को पूरा करने के बाद चुनौती का अभ्यास करें।
विभाजित निर्णय चुनौती में प्रतिस्पर्धा करने के लिए अगला > चुनें।