
गणित सहायता
प्रयोगशाला 4 और 5 को पढ़ाते समय, अतिरिक्त गणित अवधारणाएँ और गणनाएँ शामिल होती हैं। यह पृष्ठ शिक्षकों को प्रासंगिक पृष्ठभूमि संसाधन प्रदान करता है, जिससे छात्रों को इन प्रयोगशालाओं में गणित के बारे में जानकारी मिल सके।
ड्राइविंग का गणित
लैब 4 में परेड पूरी करने के लिए, छात्र अपने कोड बेस फ्लोट को सीधे परेड मार्ग पर चलाएंगे। दोनों पहियों को एक साथ चलाने वाले ड्राइवट्रेन ब्लॉकों का उपयोग करने के बजाय, छात्र VEXcode GO में [स्पिन फॉर] ब्लॉकों का उपयोग करेंगे, जैसा कि यहां दिखाया गया है, पहियों से जुड़ी मोटरों को घुमाने और रोबोट को आगे बढ़ाने के लिए। [स्पिन फॉर] ब्लॉक पैरामीटर के रूप में 'टर्न' या 'डिग्री' स्वीकार करते हैं। लैब 4 में, छात्र अपने रोबोट को परेड मार्ग की दूरी तक ले जाने के लिए इस परियोजना में इनपुट करने के लिए घुमावों की संख्या की गणना करेंगे।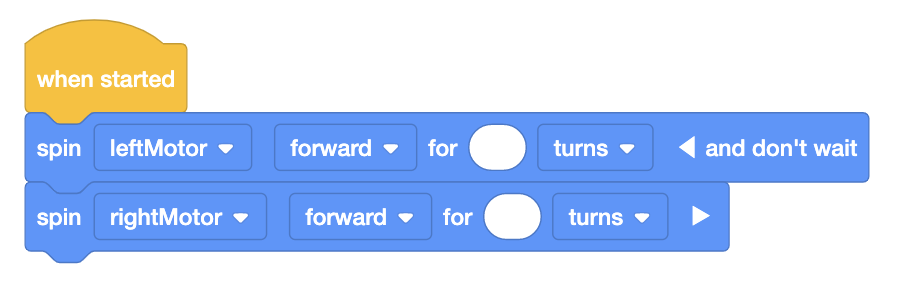
अपने रोबोट को एक निश्चित दूरी तक सीधे चलाने के लिए आवश्यक पहिया घुमावों की संख्या की गणना करने के तरीके के बारे में जानने के लिए नीचे दिया गया वीडियो देखें।
सहायक संदर्भ:
ग्रे व्हील्स के लिए शब्दावली और मूल्य:
| अवधि | परिभाषा | तस्वीर | FORMULA | कीमत |
|---|---|---|---|---|
| व्यास | एक वृत्त के केंद्र में एक सीधी रेखा का मापन | 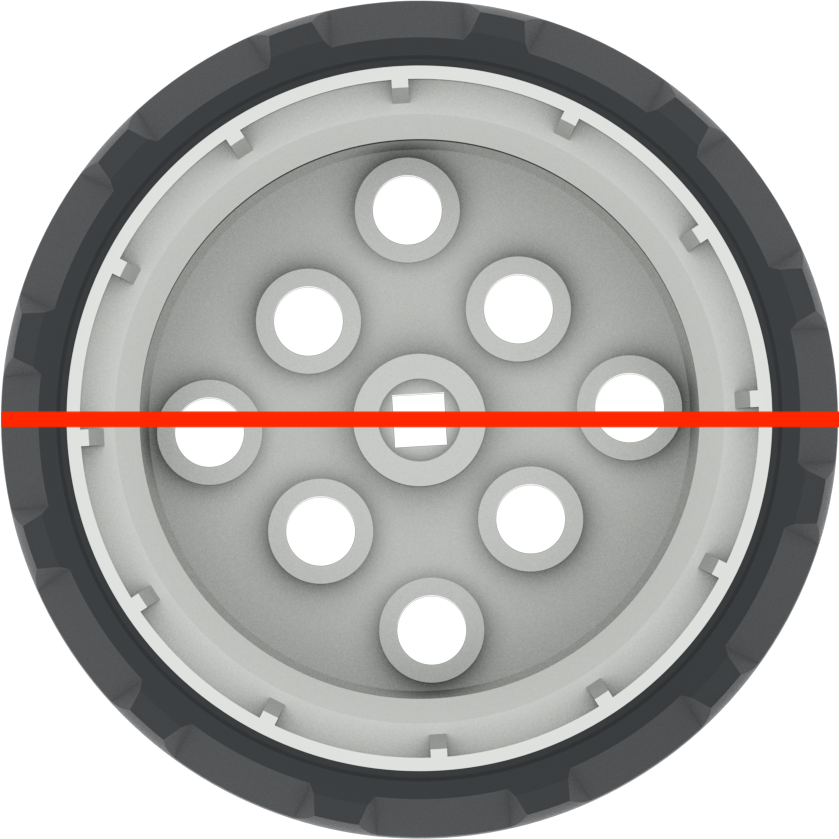 |
डी = 2 आर | ~ 50.93 मिमी या 2 इंच |
| परिधि | एक वृत्त के बाहर की कुल दूरी |  |
सी = π डी | ~ 160 मिमी या 6.25 इंच |
सटीक माप
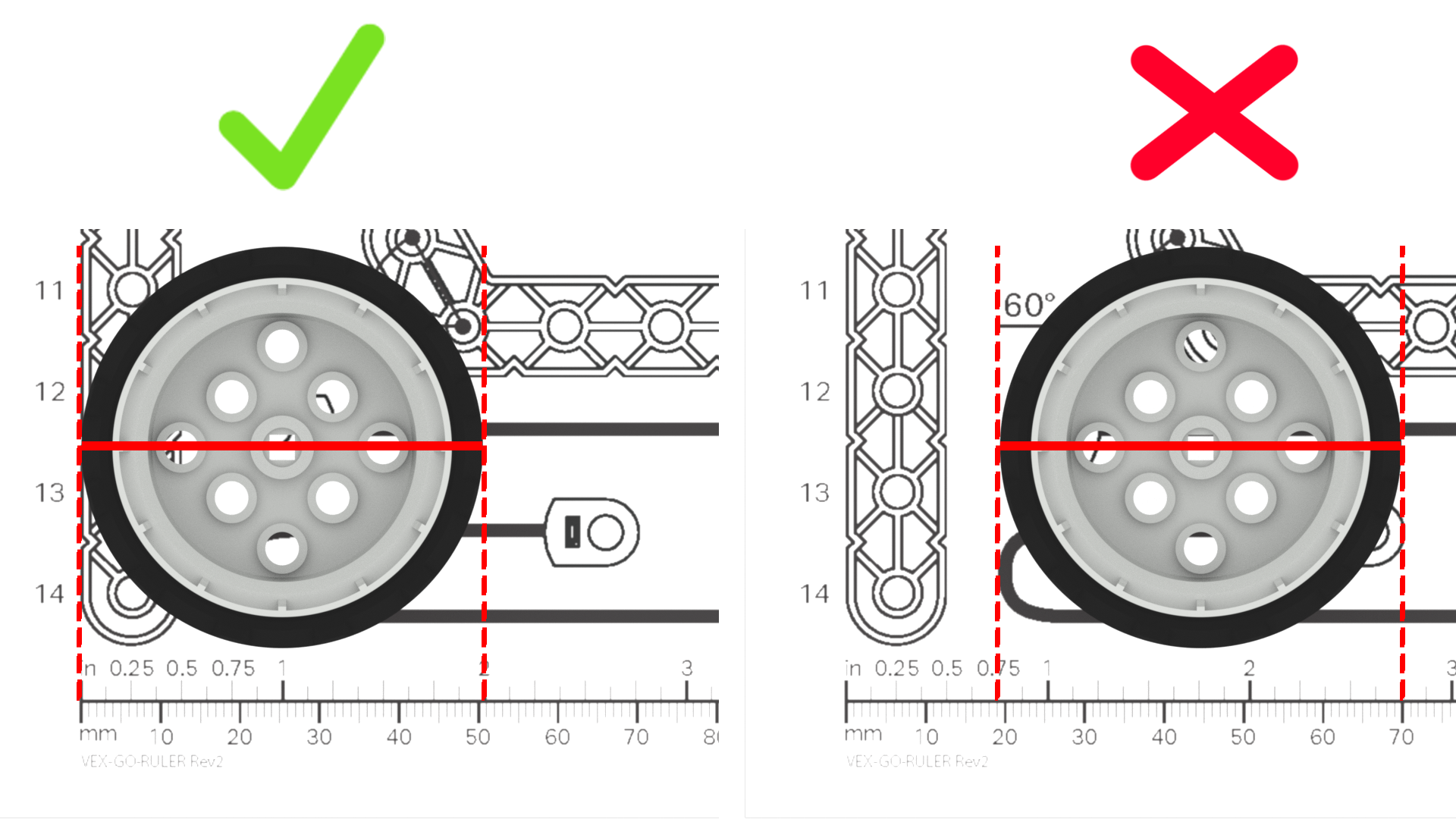
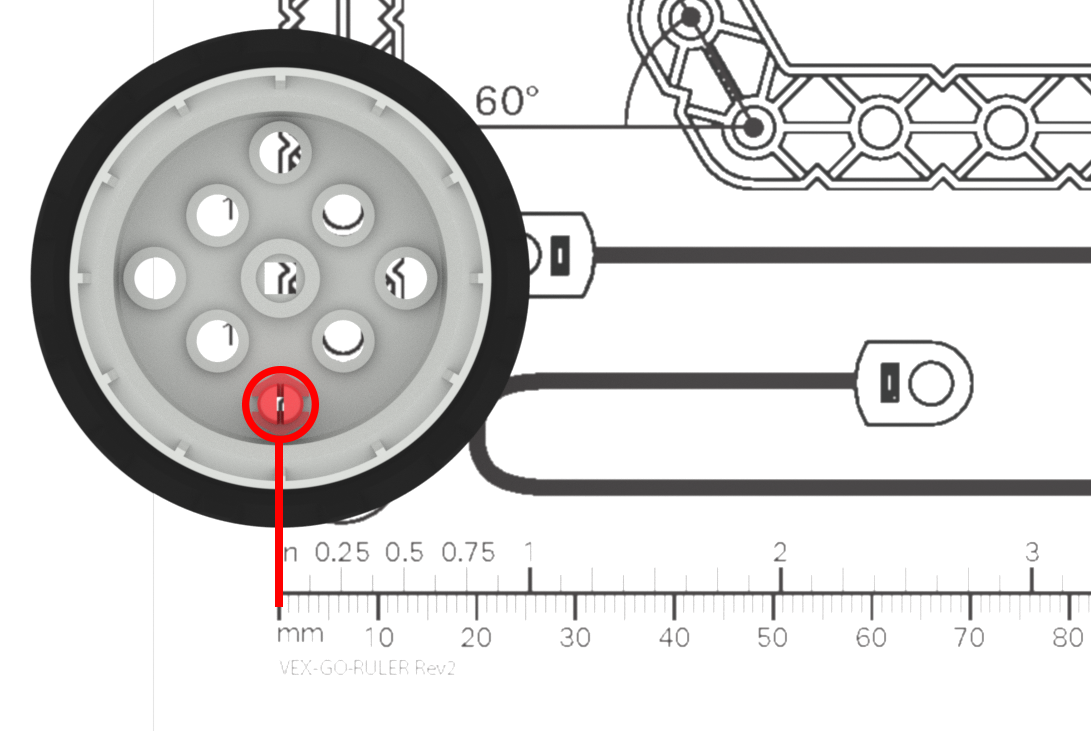
जब छात्र माप कर रहे हों, तो उन्हें सावधानीपूर्वक और सटीक ढंग से माप करने के लिए मार्गदर्शन अवश्य दें। आप विद्यार्थियों को मापने के लिए VEX GO प्रिंटेबल रूलरया कक्षा रूलरउपयोग कर सकते हैं।
- विद्यार्थियों को याद दिलाएं कि वे मापन रूलर पर शून्य बिंदु से शुरू करें, तथा जिस वस्तु को वे माप रहे हैं उसके अंतिम बिंदु पर पूरा ध्यान दें। माप को गलत तरीके से शुरू या समाप्त करने से उनकी गणनाएं और अंततः उनके रोबोट की गति प्रभावित होगी।
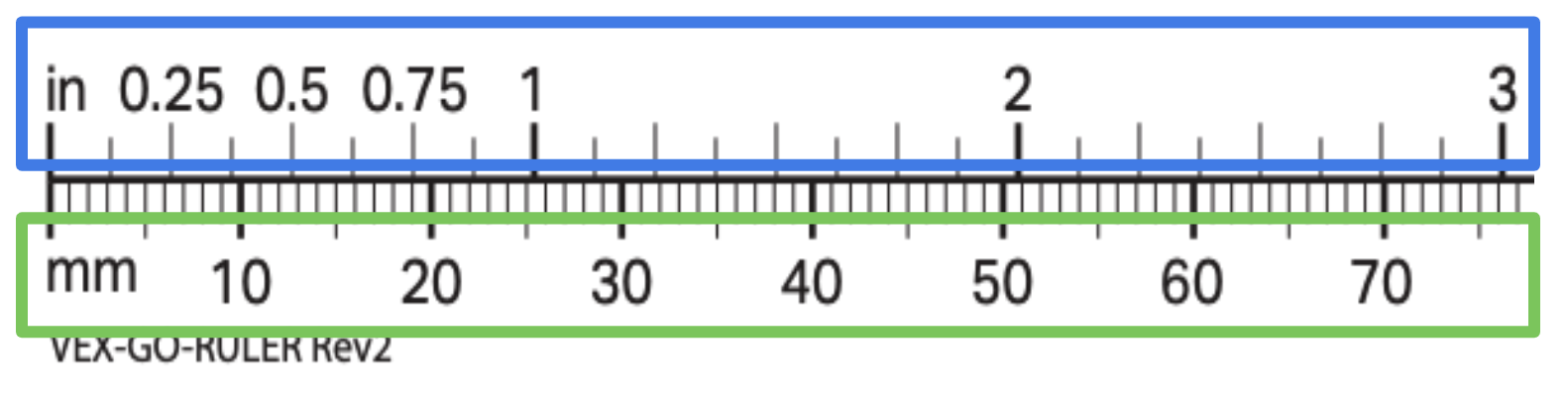
- सुनिश्चित करें कि विद्यार्थी जिस रूलर का प्रयोग कर रहे हैं,पर अंकित चिह्नों को पढ़ना जानते हों, ताकि सटीक माप लिया जा सके। यदि आप जो रूलर प्रयोग कर रहे हैं, उसमें इंपीरियल और मीट्रिक दोनों इकाइयाँ हैं (जैसे VEX GO प्रिंटेबल रूलर) तो सुनिश्चित करें कि छात्र लगातार समान माप इकाइयों का उपयोग कर रहे हैं।
- विद्यार्थी अपने माप को निकटतम इकाई, या इकाई के अंश तक पूर्णांकित कर सकते हैं। यदि आवश्यक हो तो पूर्णांकन से गणनाएं सरल हो सकती हैं; लेकिन इससे मापन कम सटीक भी हो सकता है। उदाहरण के लिए, आप विद्यार्थियों को निकटतम आधे इंच या सेंटीमीटर तक पूर्णांक बनाने का निर्देश दे सकते हैं, लेकिन उनका रोबोट आरंभिक लक्ष्य से थोड़ा आगे चला जाता है। वैकल्पिक रूप से, आप विद्यार्थियों से निकटतम ⅛ इंच या मिलीमीटर तक माप करवा सकते हैं, और पा सकते हैं कि उनके रोबोट इच्छित दूरी के करीब यात्रा करते हैं।
- यदि विद्यार्थियों को मापन के साथ अतिरिक्त अभ्यास की आवश्यकता है, आप मापन अभ्यास VEX GO गतिविधि का उपयोग व्यक्तिगत विद्यार्थियों या समूहों के साथ, या पूरी कक्षा की गतिविधि के रूप में कर सकते हैं।
360° घूमने का गणित
लैब 5 में परेड पूरी करने के लिए, छात्र अपने कोड बेस फ्लोट को मोड़ वाले परेड मार्ग पर चलाएंगे।
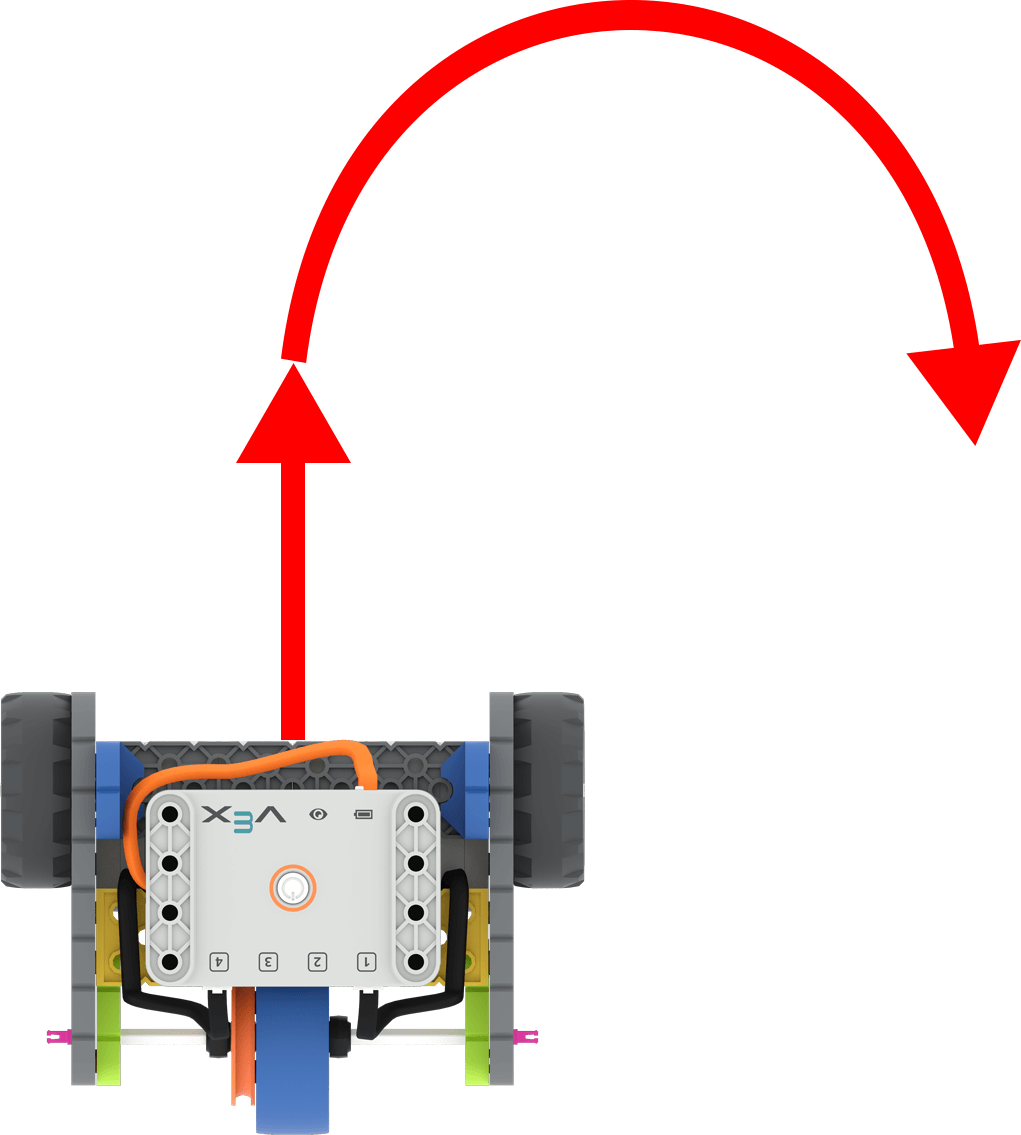
आगे की ओर ड्राइविंग और फिर दाईं ओर मुड़ने को दर्शाने वाले तीरों के साथ कोड बेस
छात्र रोबोट को सीधी रेखा में दूरी तय करने, रोबोट को गैर-रेखीय दूरी या मोड़ पर चलाने के लिए कोड करने के बारे में जो कुछ भी सीखेंगे, उसे आगे बढ़ाएंगे। छात्र अभी भी एक निश्चित दूरी तय करने के लिए आवश्यक चक्करों की संख्या की गणना कर रहे हैं, इसलिए वे पिछले प्रयोगशाला के समान ही सूत्र का उपयोग करेंगे।
अपने छात्रों के साथ रोबोट को 360° घुमाने के लिए आवश्यक पहिया घुमावों की संख्या की गणना करने के तरीके के बारे में जानने के लिए नीचे दिया गया वीडियो देखें।
सहायक संदर्भ:
जब कोड बेस घूमता है, तो ड्राइविंग पहिये रोबोट को घुमाने के लिए विपरीत दिशाओं में चलते हैं। उदाहरण के लिए, रोबोट को दाईं ओर मोड़ने के लिए बायां पहिया आगे की ओर चलेगा, जबकि दायां पहिया पीछे की ओर चलेगा।
कोड बेस के लिए शब्दावली और मान:
| अवधि | परिभाषा | तस्वीर | FORMULA | कीमत |
|---|---|---|---|---|
| व्यास | प्रत्येक पहिये के केंद्र से एक सीधी रेखा का मापन (जिसे व्हीलबेस भी कहा जाता है) |  |
डी = 2 आर | ~ 135 मिमी या 5.3 इंच |
| परिधि | 360° का चक्कर पूरा करने के लिए पहियों द्वारा तय की गई कुल दूरी |  |
सी = π डी | ~ 424 मिमी या 16.7 इंच |
किसी भी डिग्री को बदलने का गणित
रोबोट को किसी भी डिग्री तक घुमाने के लिए आवश्यक पहिया घुमावों की संख्या की गणना के बारे में अधिक जानने के लिए यह वीडियो देखें।
डिग्री में परिवर्तित करना
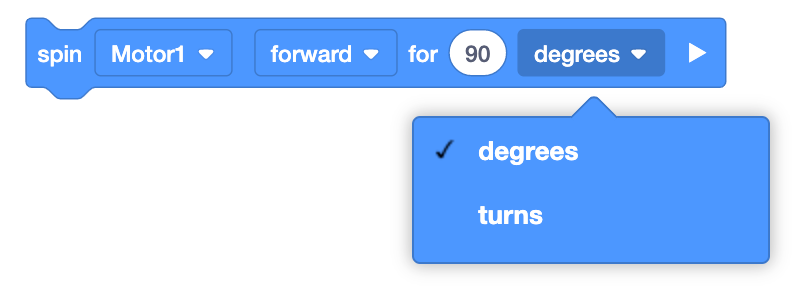
[स्पिन फॉर] ब्लॉक पैरामीटर के रूप में मोड़ या डिग्री स्वीकार करेगा। डिग्री का उपयोग करने के लिए, बस घुमावों की संख्या को 360 से गुणा करें। यह उदाहरण दर्शाता है कि रोबोट को पूरे° घुमाने के लिए मोटरों को कितने डिग्री तक घूमना होगा। ध्यान दें कि इस परियोजना में मोटरें विपरीत दिशाओं में घूम रही हैं, और 'और प्रतीक्षा न करें' को पहले ब्लॉक में जोड़ा गया है, इसलिए मोटरें एक साथ घूमती हैं। इससे रोबोट वांछित 360° तक दाईं ओर घूम जाएगा। 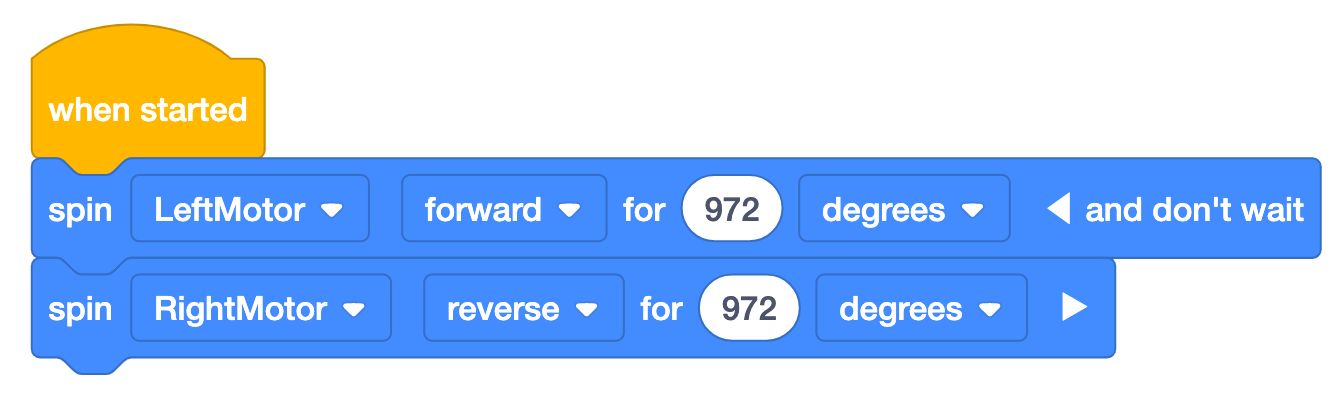
आम गलतफहमियाँ
विद्यार्थियों में वाहन चलाने और मोड़ने के गणित तथा मापन के बारे में कई गलत धारणाएं हो सकती हैं। ये कुछ सबसे आम बातें हैं, साथ ही सुझाव भी दिए गए हैं कि आप अपने विद्यार्थियों के साथ इनसे कैसे निपट सकते हैं।
| परिस्थिति | ग़लतफ़हमी | सुझाया गया सुधार |
|---|---|---|
|
शिक्षक कक्षा से पूछते हैं, रोबोट को 90° घुमाने के लिए हमें [स्पिन फॉर] ब्लॉक में क्या इनपुट करना चाहिए? छात्र ने उत्तर दिया “90”. |
पहिया द्वारा घुमाव लेने के लिए तय की गई डिग्री की दूरी, घुमाव कोण के बराबर होती है। छात्र पहिये द्वारा तय की जाने वाली दूरी की गणना करने के लिए रोबोट की घूर्णन परिधि का उपयोग नहीं कर रहे हैं। |
छात्रों को याद दिलाएं कि रोबोट को घुमाने के लिए पहियों को घूमने वाली परिधि के अनुरूप चलना होगा। (इस चित्र में, यह लाल वृत्त के साथ एक पीली रेखा से दूसरी तक है।)
पहिये को केवल 90° घुमाएं, जिससे विद्यार्थियों को यह कल्पना करने में सहायता मिलेगी कि एक निश्चित दूरी तय करने के लिए पहिया कितनी दूर घूमता है। |
|
शिक्षक कक्षा से पूछते हैं, रोबोट को 12 इंच आगे चलाने के लिए हमें [स्पिन फॉर] ब्लॉक में क्या इनपुट करना चाहिए? छात्र ने उत्तर दिया “12”. |
पहिये के घुमावों की संख्या वांछित ड्राइव दूरी के बराबर होती है। छात्र वांछित दूरी तय करने के लिए पहिया घुमावों की संख्या की गणना करने के लिए पहिया परिधि का उपयोग नहीं कर रहा है। |
विद्यार्थियों को याद दिलाएं कि रोबोट एक पहिया घुमाव में कितनी दूरी तक चलता है, तथा पूछें कि क्या 12 इंच चलाने के लिए 12 पूर्ण घुमाव बहुत अधिक या बहुत कम लगते हैं। छात्रों को इसे बेहतर ढंग से समझने में मदद करने के लिए, एक पहिये को रूलर पर 12 बार घुमाएं, ताकि छात्रों को पता चल सके कि वह दूरी कितनी है।
विद्यार्थियों को याद दिलाएं कि 1 पहिया घुमाव पहिये की परिधि है, तथा 12 इंच को उस परिधि से विभाजित किया जाना चाहिए। |
| छात्र पहिये को माप रहा है, लेकिन पहिये का कोई किनारा रूलर के शून्य चिह्न पर नहीं है |
रूलर शून्य से नहीं बल्कि 1 से शुरू होता है। छात्र सटीक माप प्राप्त करने के लिए रूलर का सही ढंग से उपयोग नहीं कर रहा है। |
विद्यार्थियों को याद दिलाएं कि रूलर '0' चिह्न से शुरू होता है, और यदि वे उस बिंदु से माप नहीं लेंगे, तो उनका माप गलत होगा। आप चाहें तो रूलर के आरंभ को टेप या रंगीन मार्कर से चिह्नित कर सकते हैं, ताकि काम करते समय विद्यार्थियों को अतिरिक्त दृश्य सहायता मिल सके। (मापने के अतिरिक्त अभ्यास के लिए, छात्र अभ्यास माप गतिविधिको पूरा कर सकते हैं।) |
|
एक छात्र का कहना है कि उनका प्रोजेक्ट काम नहीं कर रहा है। शिक्षक ने देखा कि पहिये के घुमावों की सही संख्या [स्पिन फॉर] ब्लॉक में है, लेकिन पैरामीटर 'डिग्री' पर सेट है। |
इकाइयाँ या पैरामीटर विनिमेय हैं। छात्र अपने प्रोजेक्ट में माप के मापदंडों/इकाइयों पर ध्यान नहीं दे रहे हैं। |
विद्यार्थियों से पूछें कि वे माप की कौन सी इकाई का उपयोग कर रहे हैं, और क्या वह ब्लॉक में दिए गए पैरामीटर से मेल खाती है।
|
| एक छात्र "2 ¼ टर्न" दर्ज करने के लिए [स्पिन फॉर] ब्लॉक के पैरामीटर में '21/4' दर्ज करने का प्रयास करता है। |
भिन्न और दशमलव एक ही तरह से लिखे जाते हैं। छात्र भिन्न को दशमलव में परिवर्तित नहीं कर रहा है। |
विद्यार्थियों को याद दिलाएं कि भिन्नों को दशमलव में बदलने की आवश्यकता है ताकि वे पहचानने योग्य पैरामीटर बन सकें। ऐसा करने के लिए, अंश को हर से विभाजित करें। 2 ¼=94 =2.25 आप अपने स्वयं के संसाधन बनाने के लिए छात्रों से अक्सर उपयोग किए जाने वाले भिन्नात्मक मानों और उनके दशमलव समकक्षों का चार्ट बनवाना चाह सकते हैं। |
|
शिक्षक छात्रों से पहिये की परिधि की गणना साझा करने के लिए कहते हैं। छात्र उत्तर |
परिधि की गणना त्रिज्या का उपयोग करके की जाती है -πxत्रिज्या. छात्र गणना में गलत माप का उपयोग कर रहा है। |
विद्यार्थियों को याद दिलाएं कि परिधिπ x व्यासहै; और व्यास पहिये के केंद्र के आर-पार एक सीधी रेखा है (या त्रिज्या का दोगुना)। यदि कई विद्यार्थियों को सूत्रों का उपयोग करने में कठिनाई हो रही है, तो आप मान को पूरी कक्षा की गतिविधि के रूप में मापना और गणना करना चाह सकते हैं। |

 विद्यार्थियों को याद दिलाएं कि उनकी गणनाएं तभी अपेक्षित रूप से काम करेंगी जब पैरामीटर सही इकाई पर सेट किया गया हो। टर्न और डिग्री एक ही मान नहीं हैं।
विद्यार्थियों को याद दिलाएं कि उनकी गणनाएं तभी अपेक्षित रूप से काम करेंगी जब पैरामीटर सही इकाई पर सेट किया गया हो। टर्न और डिग्री एक ही मान नहीं हैं।
उदाहरण समाधान
लैब 4 उदाहरण समाधान
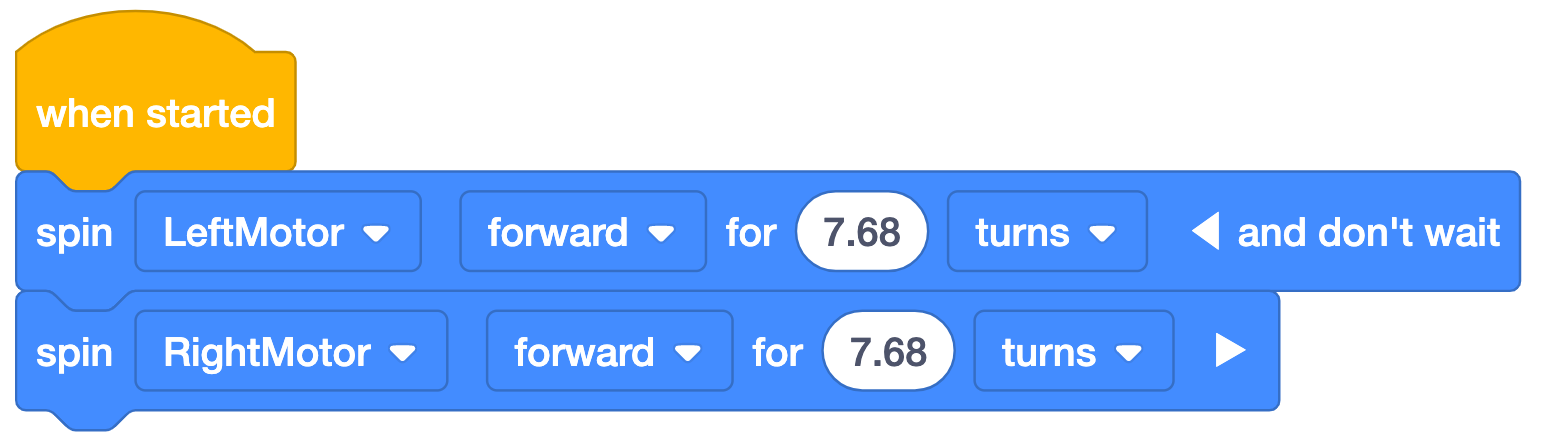
*नोट: 'और प्रतीक्षा न करें' का प्रयोग उदाहरण परियोजना में पहले ब्लॉक के साथ किया गया है, ताकि दोनों ब्लॉक एक साथ निष्पादित हों। 'और प्रतीक्षा न करें' के बिना, पहली मोटर घूमेगी, फिर दूसरी, और कोड बेस इच्छित रूप से नहीं चलेगा। सुनिश्चित करें कि छात्र 'और प्रतीक्षा न करें' को समाप्त न करें अन्यथा उनका प्रोजेक्ट अपेक्षित रूप से नहीं चलेगा।

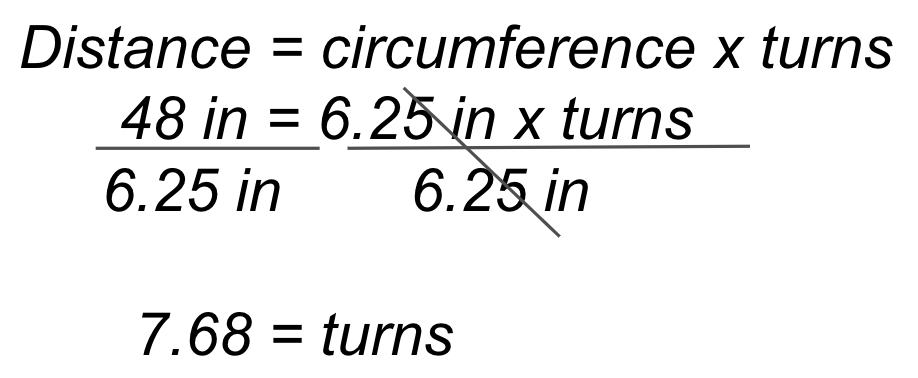
परेड मार्ग की 48 इंच (~122 सेमी) लंबाई को चलाने के लिए, कोड बेस को ~7.68 मोड़की यात्रा करने की आवश्यकता होगी। गणना बाईं ओर दिखाई गई है, और उदाहरण VEXcode GO समाधान दाईं ओर दिखाया गया है
लैब 5 उदाहरण समाधान
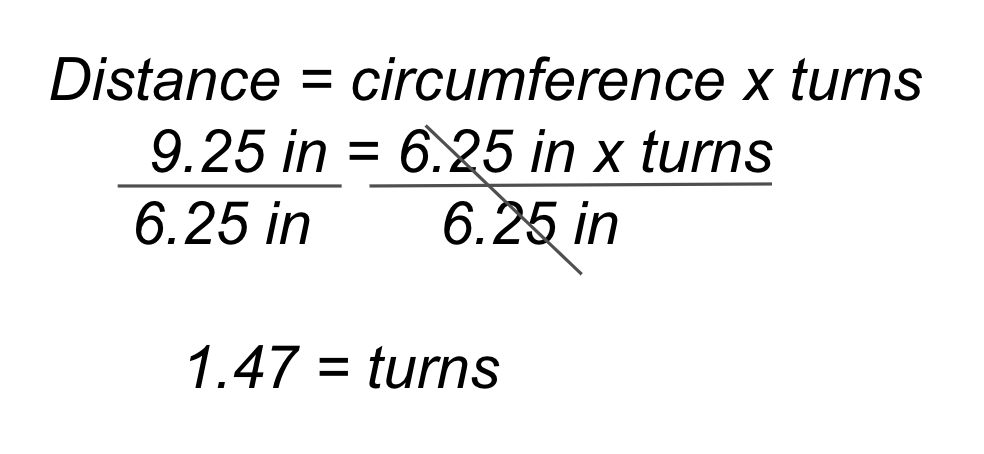
परेड मार्ग की 48 इंच (~122 सेमी) लंबाई को चलाने और 180 डिग्री मोड़ने के लिए, कोड बेस को ~7.68 मोड़ों के लिए आगे की ओर यात्रा करने की आवश्यकता होगी, फिर स्पिन एक मोटर को आगे और दूसरे को ~1.47 मोड़ों के लिए पीछे की ओर घुमाना होगा गणना को दाईं ओर उदाहरण VEXcode GO समाधान के साथ दिखाया गया है।
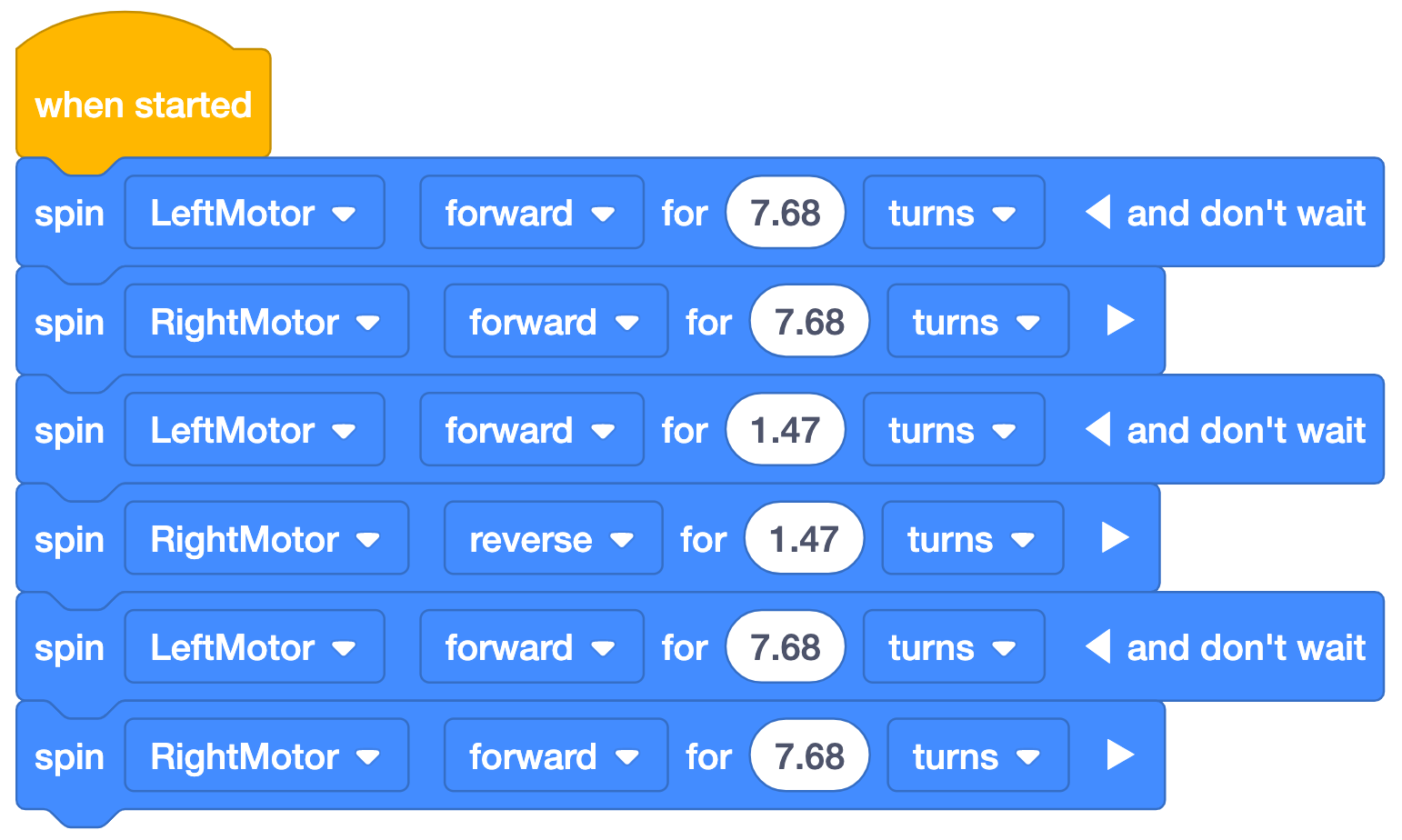
नोट: घुमावों के स्थान पर डिग्री का उपयोग करने के लिए, घुमाव की गणना को 360 से गुणा करें।
विस्तारित परेड मार्ग
यदि छात्रों को अतिरिक्त चुनौती की आवश्यकता है, तो आप परेड मार्ग को कई अलग-अलग तरीकों से बढ़ा सकते हैं। यह एक उदाहरण है, जिसका संभावित समाधान भी है।
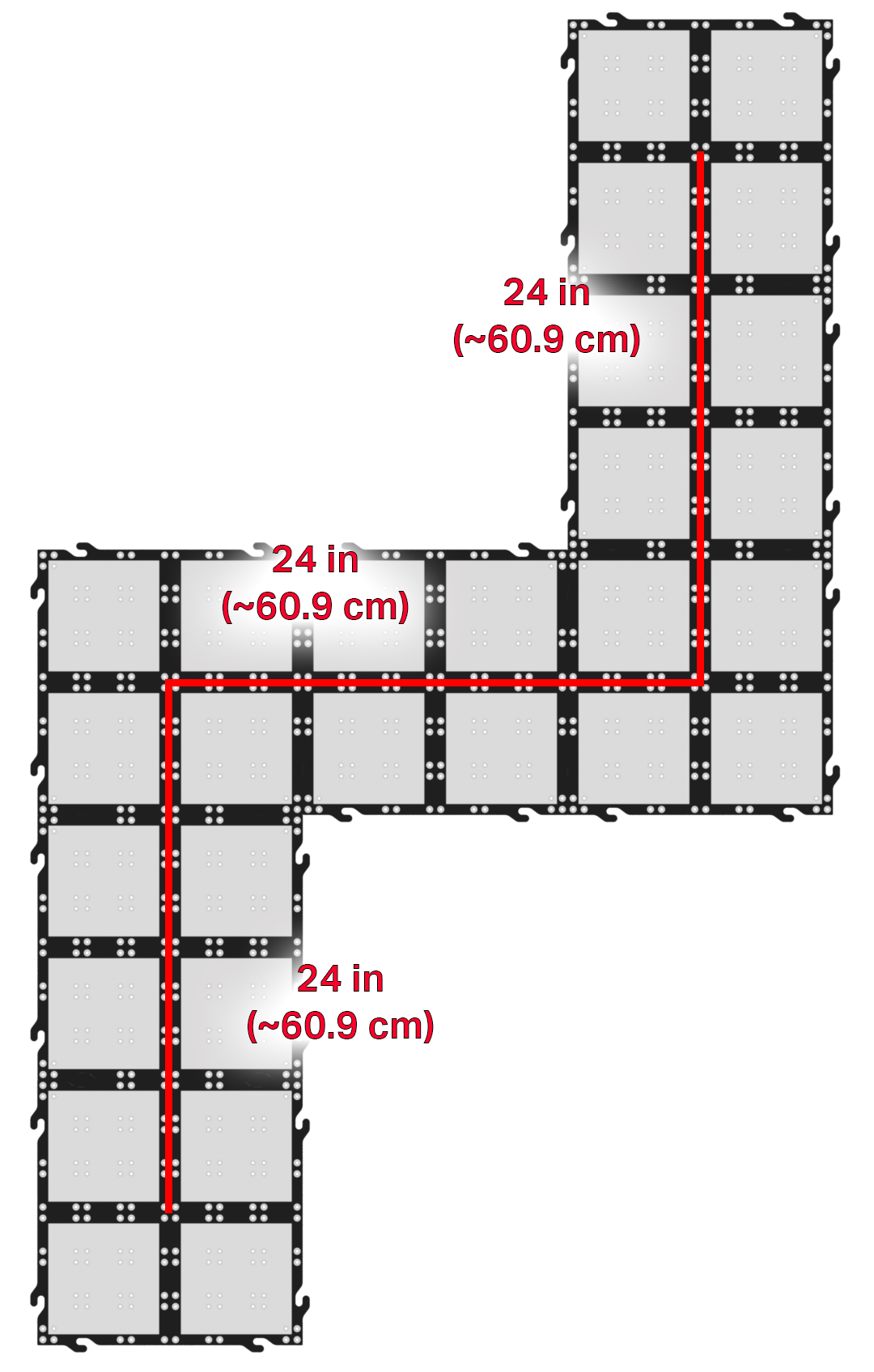
इस उदाहरण मार्ग में, ड्राइविंग दूरी और मोड़ लैब्स से आधे हो गए हैं। हालाँकि, इस मार्ग में मोड़ों की दिशा मायने रखती है। पुनर्गणना के अलावा, छात्रों को पहियों को वांछित दिशा में घुमाने के लिए दिशा का पता लगाना होगा।
पिछले प्रयोगशालाओं से प्राप्त आधी गणनाएं इस प्रकार हैं:
ड्राइविंग दूरी = ~ 3.84 मोड़
मोड़ दूरी = ~ 0.73 मोड़
इन मानों का उपयोग निम्नलिखित उदाहरण VEXcode GO समाधान में किया गया है:
