
ഗണിത പിന്തുണ
ലാബ് 4 ഉം 5 ഉം പഠിപ്പിക്കുമ്പോൾ, അധിക ഗണിത ആശയങ്ങളും കണക്കുകൂട്ടലുകളും ഉൾപ്പെടുന്നു. ഈ ലാബുകളിൽ വിദ്യാർത്ഥികൾ പര്യവേക്ഷണം ചെയ്യുന്ന ഗണിതത്തെ പിന്തുണയ്ക്കുന്നതിന് അധ്യാപകർക്ക് പ്രസക്തമായ പശ്ചാത്തല ഉറവിടങ്ങൾ ഈ പേജ് വാഗ്ദാനം ചെയ്യുന്നു.
ഡ്രൈവിംഗിന്റെ ഗണിതം
ലാബ് 4 ലെ പരേഡ് പൂർത്തിയാക്കാൻ, വിദ്യാർത്ഥികൾ അവരുടെ കോഡ് ബേസ് ഫ്ലോട്ട് ഒരു നേർരേഖ പരേഡ് റൂട്ടിലൂടെ ഓടിക്കണം. രണ്ട് ചക്രങ്ങളെയും ഒരേ സമയം ചലിപ്പിക്കുന്ന ഡ്രൈവ്ട്രെയിൻ ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നതിനുപകരം, ഇവിടെ കാണിച്ചിരിക്കുന്നതുപോലെ, VEXcode GO-യിലെ [Spin for] ബ്ലോക്കുകൾ ഉപയോഗിച്ച് ചക്രങ്ങളുമായി ബന്ധിപ്പിച്ചിരിക്കുന്ന മോട്ടോറുകൾ കറക്കി റോബോട്ടിനെ മുന്നോട്ട് നീക്കും. [സ്പിൻ ഫോർ] ബ്ലോക്കുകൾ 'ടേണുകൾ' അല്ലെങ്കിൽ 'ഡിഗ്രികൾ' പാരാമീറ്ററുകളായി സ്വീകരിക്കുന്നു. ലാബ് 4 ൽ, പരേഡ് റൂട്ടിന്റെ ദൂരം റോബോട്ടിനെ ഓടിക്കുന്നതിന് ഈ പ്രോജക്റ്റിൽ ഉൾപ്പെടുത്തേണ്ട ടേണുകളുടെ എണ്ണം വിദ്യാർത്ഥികൾ കണക്കാക്കും.
നിങ്ങളുടെ റോബോട്ടിനെ ഒരു നിശ്ചിത ദൂരത്തേക്ക് നേരെ ഓടിക്കാൻ ആവശ്യമായ ചക്രങ്ങളുടെ എണ്ണം എങ്ങനെ കണക്കാക്കാമെന്ന് അറിയാൻ താഴെയുള്ള വീഡിയോ കാണുക.
സഹായകരമായ റഫറൻസുകൾ:
ഗ്രേ വീലുകളുടെ പദാവലിയും മൂല്യങ്ങളും:
| കാലാവധി | നിർവചനം | വിഷ്വൽ | ഫോർമുല | വില |
|---|---|---|---|---|
| വ്യാസം | ഒരു വൃത്തത്തിന്റെ മധ്യഭാഗത്തുകൂടിയുള്ള ഒരു നേർരേഖയുടെ അളവ് |  |
d = 2 ആർ | ~ 50.93 മിമി അല്ലെങ്കിൽ 2 ഇഞ്ച് |
| ചുറ്റളവ് | ഒരു വൃത്തത്തിന്റെ പുറംഭാഗത്തുനിന്നുള്ള ആകെ ദൂരം |  |
സി = π ഡി | ~ 160 മിമി അല്ലെങ്കിൽ 6.25 ഇഞ്ച് |
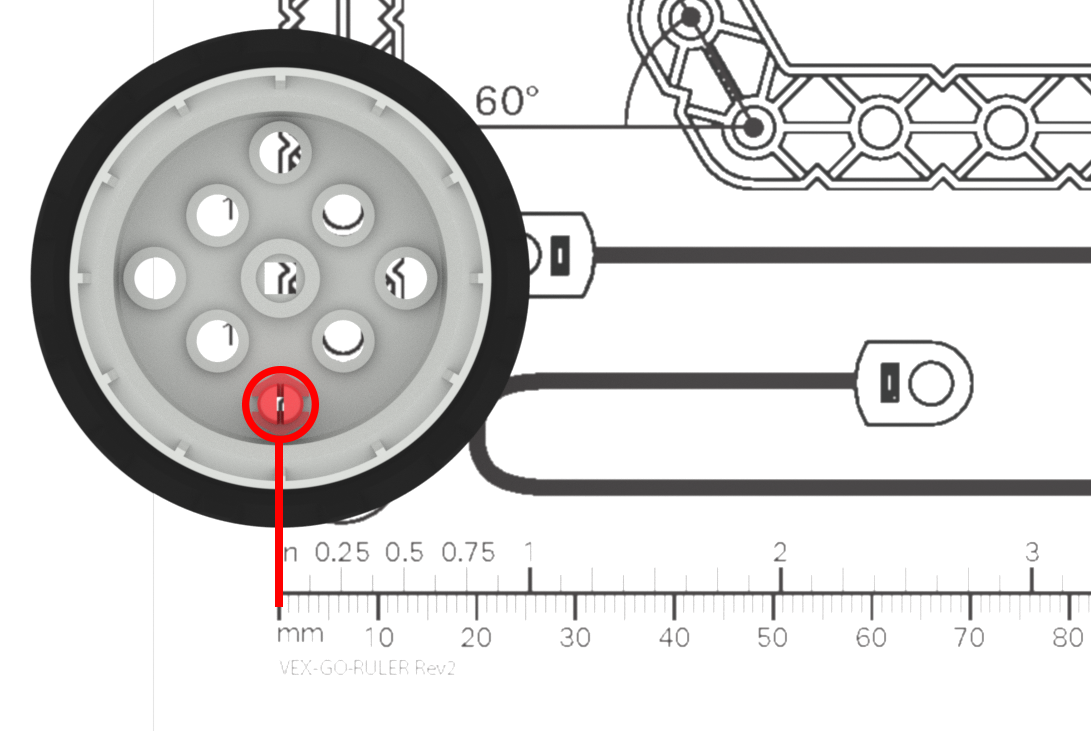
കൃത്യമായി അളക്കുന്നു
വിദ്യാർത്ഥികൾ അളക്കുമ്പോൾ, ശ്രദ്ധയോടെയും കൃത്യമായും അളക്കാൻ അവരെ നയിക്കുക. വിദ്യാർത്ഥികൾക്ക് അളക്കാൻ VEX GO പ്രിന്റബിൾ റൂളർഅല്ലെങ്കിൽ ക്ലാസ് റൂളറുകൾഉപയോഗിക്കാം.
- റൂളറിലെ പൂജ്യം പോയിന്റിൽ നിന്ന് അളക്കാൻ തുടങ്ങാൻ വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക, അവർ അളക്കുന്ന വസ്തുവിന്റെ അവസാന പോയിന്റിൽ ശ്രദ്ധ ചെലുത്തുക. അവരുടെ അളവുകൾ തെറ്റായി ആരംഭിക്കുകയോ അവസാനിപ്പിക്കുകയോ ചെയ്യുന്നത് അവരുടെ കണക്കുകൂട്ടലുകളെയും അവരുടെ റോബോട്ടിന്റെ ആത്യന്തിക ചലനത്തെയും ബാധിക്കും.

- കൃത്യമായി അളക്കുന്നതിന്,ഉപയോഗിക്കുന്ന റൂളറിലെ അടയാളങ്ങൾ എങ്ങനെ വായിക്കണമെന്ന് വിദ്യാർത്ഥികൾക്ക് അറിയാമെന്ന് ഉറപ്പാക്കുക. നിങ്ങൾ ഉപയോഗിക്കുന്ന റൂളറുകൾക്ക് ഇംപീരിയൽ, മെട്രിക് യൂണിറ്റുകൾ ഉണ്ടെങ്കിൽ ( VEX GO പ്രിന്റബിൾ റൂളർപോലെ), വിദ്യാർത്ഥികൾ സ്ഥിരമായി ഒരേ അളവുകോൽ ഉപയോഗിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക.

- വിദ്യാർത്ഥികൾക്ക് അവരുടെ അളവുകൾ ഏറ്റവും അടുത്തുള്ള യൂണിറ്റിലേക്ക്, അല്ലെങ്കിൽ ഒരു യൂണിറ്റിന്റെ ഭിന്നസംഖ്യയിലേക്ക് റൗണ്ട് ചെയ്യാം. ആവശ്യമെങ്കിൽ, റൗണ്ടിംഗ് കണക്കുകൂട്ടലുകൾ ലളിതമാക്കും; എന്നാൽ അളവുകൾ കൃത്യത കുറഞ്ഞതാക്കാനും കഴിയും. ഉദാഹരണത്തിന്, നിങ്ങൾക്ക് വിദ്യാർത്ഥികളോട് ഏറ്റവും അടുത്തുള്ള അര ഇഞ്ച് അല്ലെങ്കിൽ സെന്റിമീറ്റർ വരെ റൗണ്ട് അപ്പ് ചെയ്യാൻ നിർദ്ദേശിക്കാം, പക്ഷേ അവരുടെ റോബോട്ട് ആദ്യം ഉദ്ദേശിച്ചതിനേക്കാൾ അല്പം കൂടി മുന്നോട്ട് നീങ്ങുന്നു. പകരമായി, വിദ്യാർത്ഥികളോട് ഒരു ഇഞ്ചിന്റെ ഏറ്റവും അടുത്തുള്ള ⅛ അല്ലെങ്കിൽ മില്ലിമീറ്റർ വരെ അളക്കാൻ ആവശ്യപ്പെടാം, അവരുടെ റോബോട്ടുകൾ ഉദ്ദേശിച്ച ദൂരത്തിന് അടുത്ത് സഞ്ചരിക്കുന്നതായി കണ്ടെത്താം.
- വിദ്യാർത്ഥികൾക്ക് അളവെടുക്കുന്നതിൽ അധിക പരിശീലനം ആവശ്യമുണ്ടെങ്കിൽ, നിങ്ങൾക്ക് 2 വ്യക്തിഗത വിദ്യാർത്ഥികളുമായോ ഗ്രൂപ്പുകളുമായോ അല്ലെങ്കിൽ മുഴുവൻ ക്ലാസ് പ്രവർത്തനമായോ അളക്കൽ VEX GO പ്രവർത്തനം പരിശീലിക്കാം.
360° തിരിയുന്നതിന്റെ ഗണിതം
ലാബ് 5 ലെ പരേഡ് പൂർത്തിയാക്കാൻ, വിദ്യാർത്ഥികൾ അവരുടെ കോഡ് ബേസ് ഫ്ലോട്ട് ഒരു പരേഡ് റൂട്ടിലൂടെ ഒരു ടേൺ ഉപയോഗിച്ച് ഓടിക്കും.

മുന്നോട്ട് വാഹനമോടിച്ച് വലത്തേക്ക് തിരിയുന്നത് കാണിക്കുന്ന അമ്പടയാളങ്ങളുള്ള കോഡ് ബേസ്
ഒരു നേർരേഖ ദൂരം സഞ്ചരിക്കാൻ റോബോട്ടിനെ കോഡ് ചെയ്യുന്നതിനെക്കുറിച്ചും, ഒരു നോൺ-ലീനിയർ ദൂരം ഓടിക്കാൻ റോബോട്ടിനെ കോഡ് ചെയ്യുന്നതിനെക്കുറിച്ചും, അല്ലെങ്കിൽ ഒരു വളവിനെക്കുറിച്ചും വിദ്യാർത്ഥികൾ പഠിച്ച കാര്യങ്ങളെ അടിസ്ഥാനമാക്കി നിർമ്മിക്കും. ഒരു നിശ്ചിത ദൂരം സഞ്ചരിക്കാൻ ആവശ്യമായ തിരിവുകളുടെ എണ്ണം വിദ്യാർത്ഥികൾ ഇപ്പോഴും കണക്കാക്കിക്കൊണ്ടിരിക്കുകയാണ്, അതിനാൽ അവർ മുമ്പത്തെ ലാബിലെ അതേ ഫോർമുല ഉപയോഗിക്കും.
നിങ്ങളുടെ വിദ്യാർത്ഥികളുമായി ചേർന്ന് റോബോട്ടിന്റെ 360° ടേൺ ഓടിക്കാൻ ആവശ്യമായ വീൽ ടേണുകളുടെ എണ്ണം എങ്ങനെ കണക്കാക്കാമെന്ന് അറിയാൻ താഴെയുള്ള വീഡിയോ കാണുക.
സഹായകരമായ റഫറൻസുകൾ:
കോഡ് ബേസ് തിരിയുമ്പോൾ, റോബോട്ടിനെ തിരിക്കാൻ ഡ്രൈവിംഗ് വീലുകൾ വിപരീത ദിശകളിലേക്ക് നീങ്ങുന്നു. ഉദാഹരണത്തിന്, റോബോട്ടിനെ വലത്തേക്ക് തിരിക്കുന്നതിന്, ഇടതുചക്രം മുന്നോട്ട് പോകും, അതേസമയം വലതുചക്രം പിന്നോട്ട് പോകും.
കോഡ് ബേസിനായുള്ള പദാവലിയും മൂല്യങ്ങളും:
| കാലാവധി | നിർവചനം | വിഷ്വൽ | ഫോർമുല | വില |
|---|---|---|---|---|
| വ്യാസം | ഓരോ ചക്രത്തിന്റെയും മധ്യഭാഗത്ത് നിന്ന് ഒരു നേർരേഖയുടെ അളവ് (വീൽബേസ് എന്നും അറിയപ്പെടുന്നു) |  |
d = 2 ആർ | ~ 135 മിമി അല്ലെങ്കിൽ 5.3 ഇഞ്ച് |
| ചുറ്റളവ് | 360° ഭ്രമണം പൂർത്തിയാക്കാൻ ചക്രങ്ങൾ സഞ്ചരിക്കുന്ന ആകെ ദൂരം |  |
സി = π ഡി | ~ 424 മിമി അഥവാ 16.7 ഇഞ്ച് |
ഏതെങ്കിലും ബിരുദം നേടുന്നതിനുള്ള ഗണിതശാസ്ത്രം
റോബോട്ടിന് എത്ര ഡിഗ്രി തിരിയണമെന്ന് കണക്കാക്കുന്നതിനെക്കുറിച്ച് കൂടുതലറിയാൻ ഈ വീഡിയോ കാണുക.
ഡിഗ്രികളിലേക്ക് പരിവർത്തനം ചെയ്യുന്നു
[സ്പിൻ ഫോർ] ബ്ലോക്ക് ടേണുകളോ ഡിഗ്രികളോ പാരാമീറ്ററുകളായി സ്വീകരിക്കും. ഡിഗ്രികൾ ഉപയോഗിക്കാൻ, തിരിവുകളുടെ എണ്ണം 360 കൊണ്ട് ഗുണിക്കുക. റോബോട്ടിനെ 360° പൂർണ്ണമായി തിരിക്കുന്നതിന് മോട്ടോറുകൾ എത്ര ഡിഗ്രി കറങ്ങുമെന്ന് ഈ ഉദാഹരണം കാണിക്കുന്നു. ഈ പ്രോജക്റ്റിൽ മോട്ടോറുകൾ വിപരീത ദിശകളിലാണ് കറങ്ങുന്നതെന്ന് ശ്രദ്ധിക്കുക, ആദ്യത്തെ ബ്ലോക്കിലേക്ക് 'കാത്തിരിക്കരുത്' ചേർത്തിരിക്കുന്നു, അങ്ങനെ മോട്ടോറുകൾ ഒരേസമയം കറങ്ങുന്നു. ഇത് റോബോട്ടിനെ ആവശ്യമുള്ള 360°യിൽ വലത്തേക്ക് തിരിക്കും. 
സാധാരണ തെറ്റിദ്ധാരണകൾ
ഡ്രൈവിംഗിന്റെയും ടേണിംഗിന്റെയും അളവെടുപ്പ്, ഗണിതം എന്നിവയെക്കുറിച്ച് വിദ്യാർത്ഥികൾക്ക് നിരവധി തെറ്റിദ്ധാരണകൾ ഉണ്ടാകാം. ഇവ ഏറ്റവും സാധാരണമായ ചിലതാണ്, നിങ്ങളുടെ വിദ്യാർത്ഥികളുമായി ഇവ എങ്ങനെ കൈകാര്യം ചെയ്യാമെന്നതിനുള്ള നിർദ്ദേശങ്ങളുമുണ്ട്.
| സാഹചര്യം | തെറ്റിദ്ധാരണ | നിർദ്ദേശിച്ച തിരുത്തൽ |
|---|---|---|
|
റോബോട്ടിനെ 90° തിരിക്കാൻ [സ്പിൻ ഫോർ] ബ്ലോക്കിൽ എന്താണ് ടൈപ്പ് ചെയ്യേണ്ടതെന്ന് ടീച്ചർ ക്ലാസ്സിനോട് ചോദിക്കുന്നു. വിദ്യാർത്ഥി "90" എന്ന് ഉത്തരം നൽകുന്നു. |
ഒരു തിരിവ് വരുത്താൻ ചക്രം നയിക്കുന്ന ദൂരം ഡിഗ്രിയിൽ ടേൺ കോൺ തുല്യമാണ്. ചക്രം ഓടിക്കേണ്ട ദൂരം ഡിഗ്രിയിൽ കണക്കാക്കാൻ വിദ്യാർത്ഥികൾ റോബോട്ടിന്റെ ടേണിംഗ് ചുറ്റളവ് ഉപയോഗിക്കുന്നില്ല. |
റോബോട്ട് തിരിയണമെങ്കിൽ ചക്രങ്ങൾ ടേണിംഗ് ചുറ്റളവിലൂടെ സഞ്ചരിക്കണമെന്ന് വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക. (ഈ ചിത്രത്തിൽ, അത് ഒരു മഞ്ഞ വരയിൽ നിന്ന് മറ്റൊന്നിലേക്കുള്ള ചുവന്ന വൃത്തത്തിലാണുള്ളത്.)
ഒരു നിശ്ചിത ദൂരം സഞ്ചരിക്കാൻ ചക്രം എത്ര ദൂരം തിരിയുന്നുവെന്ന് വിദ്യാർത്ഥികൾക്ക് ദൃശ്യവൽക്കരിക്കാൻ സഹായിക്കുന്നതിന്, ചക്രം 90° മാത്രം തിരിക്കുക. |
|
റോബോട്ട് 12 ഇഞ്ച് മുന്നോട്ട് ഓടിക്കാൻ [സ്പിൻ ഫോർ] ബ്ലോക്കിൽ എന്താണ് ടൈപ്പ് ചെയ്യേണ്ടതെന്ന് ടീച്ചർ ക്ലാസ്സിനോട് ചോദിക്കുന്നു. വിദ്യാർത്ഥി "12" എന്ന് ഉത്തരം നൽകുന്നു. |
ചക്ര തിരിവുകളുടെ എണ്ണം ആവശ്യമുള്ള ഡ്രൈവ് ദൂരത്തിന് തുല്യമാണ്. ആവശ്യമുള്ള ദൂരം ഓടിക്കാൻ ചക്രത്തിന്റെ തിരിവുകളുടെ എണ്ണം കണക്കാക്കാൻ വിദ്യാർത്ഥി ചക്രത്തിന്റെ ചുറ്റളവ് ഉപയോഗിക്കുന്നില്ല. |
ഒരു വീൽ ടേൺ ഉപയോഗിച്ച് റോബോട്ട് എത്ര ദൂരം നീങ്ങുന്നുവെന്ന് വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക, 12 ഇഞ്ച് ഓടിക്കാൻ 12 എണ്ണം വളരെയധികം അല്ലെങ്കിൽ വളരെ കുറച്ച് പൂർണ്ണമായ ടേണുകൾ പോലെ തോന്നുന്നുണ്ടോ എന്ന് ചോദിക്കുക. ഇത് നന്നായി ദൃശ്യവൽക്കരിക്കാൻ വിദ്യാർത്ഥികളെ സഹായിക്കുന്നതിന്, ഒരു ചക്രം ഒരു റൂളറിലൂടെ 12 ചക്രങ്ങൾ വളയ്ക്കുക, ആ ദൂരം എത്രയാണെന്ന് വിദ്യാർത്ഥികൾക്ക് കാണിക്കുക.
ഒരു ചക്രത്തിന്റെ ഭ്രമണം ചക്രത്തിന്റെ ചുറ്റളവ് ആണെന്നും 12 ഇഞ്ച് ആ ചുറ്റളവ് കൊണ്ട് ഹരിക്കണമെന്നും വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക. |
| വിദ്യാർത്ഥി ചക്രം അളക്കുന്നു, എന്നാൽ ചക്രത്തിന്റെ അരികും റൂളറിന്റെ പൂജ്യം മാർക്കിൽ ഇല്ല. |
റൂളർ ആരംഭിക്കുന്നത് പൂജ്യത്തിലല്ല, 1 ലാണ്. കൃത്യമായ അളവ് ലഭിക്കുന്നതിന് വേണ്ടി വിദ്യാർത്ഥി റൂളർ ശരിയായി ഉപയോഗിക്കുന്നില്ല. |
റൂളർ '0' മാർക്കിൽ നിന്നാണ് ആരംഭിക്കുന്നതെന്ന് വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക, ആ പോയിന്റിൽ നിന്ന് അളക്കുന്നില്ലെങ്കിൽ അവരുടെ അളവുകൾ തെറ്റായിരിക്കുമെന്ന് ഓർമ്മിപ്പിക്കുക. വിദ്യാർത്ഥികൾ ജോലി ചെയ്യുമ്പോൾ ഒരു അധിക ദൃശ്യ സഹായമായി, റൂളറിന്റെ തുടക്കം ടേപ്പ് അല്ലെങ്കിൽ നിറമുള്ള മാർക്കർ ഉപയോഗിച്ച് അടയാളപ്പെടുത്തുന്നത് നല്ലതാണ്. (അളക്കലുമായി ബന്ധപ്പെട്ട അധിക പരിശീലനത്തിനായി, വിദ്യാർത്ഥികൾക്ക് പ്രാക്ടീസ് മെഷറിംഗ് ആക്റ്റിവിറ്റിപൂർത്തിയാക്കാം.) |
|
ഒരു വിദ്യാർത്ഥി അവരുടെ പ്രോജക്റ്റ് പ്രവർത്തിക്കുന്നില്ലെന്ന് പറയുന്നു. ചക്രത്തിന്റെ ശരിയായ തിരിവുകളുടെ എണ്ണം [Spin for] ബ്ലോക്കിലാണെന്ന് അധ്യാപകൻ ശ്രദ്ധിക്കുന്നു, പക്ഷേ പാരാമീറ്റർ 'ഡിഗ്രികൾ' ആയി സജ്ജീകരിച്ചിരിക്കുന്നു. |
യൂണിറ്റുകളോ പാരാമീറ്ററുകളോ പരസ്പരം മാറ്റാവുന്നതാണ്. വിദ്യാർത്ഥികൾ അവരുടെ പ്രോജക്റ്റിലെ പാരാമീറ്ററുകൾ/അളവിന്റെ യൂണിറ്റുകൾ ശ്രദ്ധിക്കുന്നില്ല. |
വിദ്യാർത്ഥികളോട് അവർ ഏത് യൂണിറ്റ് അളവാണ് ഉപയോഗിക്കുന്നതെന്നും അത് ബ്ലോക്കിലെ പാരാമീറ്ററുമായി പൊരുത്തപ്പെടുന്നുണ്ടോ എന്നും ചോദിക്കുക.
|
| ഒരു വിദ്യാർത്ഥി [Spin for] ബ്ലോക്കിന്റെ പാരാമീറ്ററിൽ '21/4' എന്ന് നൽകാൻ ശ്രമിക്കുന്നു, “2 ¼ ടേണുകൾ” നൽകുക. |
ഭിന്നസംഖ്യകളും ദശാംശങ്ങളും ഒരേ രീതിയിൽ എഴുതുന്നു. വിദ്യാർത്ഥി ഭിന്നസംഖ്യയെ ദശാംശത്തിലേക്ക് പരിവർത്തനം ചെയ്യുന്നില്ല. |
ഭിന്നസംഖ്യകളെ ദശാംശ സംഖ്യകളാക്കി മാറ്റേണ്ടതുണ്ടെന്ന് വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക, അങ്ങനെ അവ തിരിച്ചറിയാവുന്ന പാരാമീറ്ററുകളാകാം. ഇത് ചെയ്യുന്നതിന്, സംഖ്യയെ ഡിനോമിനേറ്റർ കൊണ്ട് ഹരിക്കുക. 2 ¼=94 =2.25 വിദ്യാർത്ഥികൾ പതിവായി ഉപയോഗിക്കുന്ന ഫ്രാക്ഷണൽ മൂല്യങ്ങളും അവയുടെ ദശാംശ തുല്യതകളും ചാർട്ട് ചെയ്ത് സ്വന്തം റിസോഴ്സ് സൃഷ്ടിക്കുന്നത് നിങ്ങൾക്ക് ആവശ്യമായി വന്നേക്കാം. |
|
അധ്യാപകൻ വിദ്യാർത്ഥികളോട് അവരുടെ ചക്ര ചുറ്റളവ് കണക്കുകൂട്ടൽ പങ്കുവെക്കാൻ ആവശ്യപ്പെടുന്നു. വിദ്യാർത്ഥികളുടെ ഉത്തരങ്ങൾ |
ചുറ്റളവ് ആരം ഉപയോഗിച്ചാണ് കണക്കാക്കുന്നത് -πxആരം. കണക്കുകൂട്ടലിൽ വിദ്യാർത്ഥി തെറ്റായ അളവുകോലാണ് ഉപയോഗിക്കുന്നത്. |
വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക, ചുറ്റളവ്π x വ്യാസംആണെന്നും വ്യാസം ചക്രത്തിന്റെ മധ്യഭാഗത്തുള്ള ഒരു നേർരേഖയാണെന്നും (അല്ലെങ്കിൽ ആരത്തിന്റെ ഇരട്ടി) ആണെന്നും.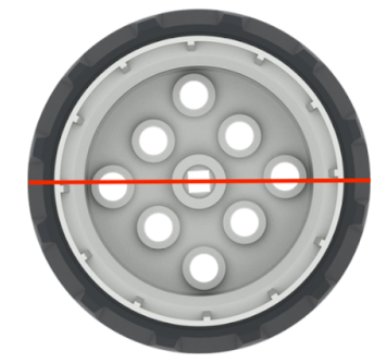 പല വിദ്യാർത്ഥികൾക്കും ഫോർമുലകൾ ഉപയോഗിക്കുന്നതിൽ ബുദ്ധിമുട്ടുണ്ടെങ്കിൽ, മുഴുവൻ ക്ലാസ് പ്രവർത്തനമായും മൂല്യം അളക്കാനും കണക്കാക്കാനും നിങ്ങൾ ആഗ്രഹിച്ചേക്കാം. |

 പാരാമീറ്റർ ശരിയായ യൂണിറ്റിലേക്ക് സജ്ജീകരിച്ചിട്ടുണ്ടെങ്കിൽ മാത്രമേ അവരുടെ കണക്കുകൂട്ടലുകൾ ഉദ്ദേശിച്ച രീതിയിൽ പ്രവർത്തിക്കൂ എന്ന് വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക. തിരിവുകളും ഡിഗ്രികളും ഒരേ മൂല്യമല്ല.
പാരാമീറ്റർ ശരിയായ യൂണിറ്റിലേക്ക് സജ്ജീകരിച്ചിട്ടുണ്ടെങ്കിൽ മാത്രമേ അവരുടെ കണക്കുകൂട്ടലുകൾ ഉദ്ദേശിച്ച രീതിയിൽ പ്രവർത്തിക്കൂ എന്ന് വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക. തിരിവുകളും ഡിഗ്രികളും ഒരേ മൂല്യമല്ല.
ഉദാഹരണ പരിഹാരങ്ങൾ
ലാബ് 4 ഉദാഹരണ പരിഹാരം
*കുറിപ്പ്: ഉദാഹരണ പ്രോജക്റ്റിലെ ആദ്യ ബ്ലോക്കിനൊപ്പം 'and don't wait' ഉപയോഗിച്ചിരിക്കുന്നതിനാൽ രണ്ട് ബ്ലോക്കുകളും ഒരേസമയം എക്സിക്യൂട്ട് ചെയ്യപ്പെടും. 'ആൻഡ് ഡോണ്ട് വെയ്റ്റ്' ഇല്ലാതെ, ആദ്യത്തെ മോട്ടോർ കറങ്ങും, പിന്നീട് രണ്ടാമത്തേത് കറങ്ങും, കോഡ് ബേസ് ഉദ്ദേശിച്ച രീതിയിൽ പ്രവർത്തിക്കില്ല. വിദ്യാർത്ഥികൾ 'കാത്തിരിക്കരുത്' എന്ന് ഉറപ്പുവരുത്തുക, അല്ലെങ്കിൽ അവരുടെ പ്രോജക്റ്റ് ഉദ്ദേശിച്ച രീതിയിൽ പ്രവർത്തിക്കില്ല.

പരേഡ് റൂട്ടിന്റെ 48 ഇഞ്ച് (~122 സെ.മീ) നീളം ഓടിക്കുന്നതിന്, കോഡ് ബേസ് ~7.68 തിരിവുകൾസഞ്ചരിക്കേണ്ടതുണ്ട്. കണക്കുകൂട്ടൽ ഇടതുവശത്തും, ഉദാഹരണം VEXcode GO സൊല്യൂഷൻ വലതുവശത്തും കാണിച്ചിരിക്കുന്നു.


ലാബ് 5 ഉദാഹരണ പരിഹാരം
പരേഡ് റൂട്ടിന്റെ 48 ഇഞ്ച് (~122 സെ.മീ) നീളം ഓടിച്ച് 180 ഡിഗ്രി തിരിയാൻ, കോഡ് ബേസ് ~7.68 ടേണുകൾ മുന്നോട്ട് സഞ്ചരിക്കേണ്ടതുണ്ട്, തുടർന്ന് ഒരു മോട്ടോർ മുന്നോട്ട് കറക്കേണ്ടതുണ്ട്, മറ്റൊന്ന് ~1.47 ടേണുകൾപിന്നിലേക്ക് കറക്കേണ്ടതുണ്ട്. വലതുവശത്തുള്ള VEXcode GO സൊല്യൂഷന്റെ ഉദാഹരണത്തോടൊപ്പം കണക്കുകൂട്ടൽ കാണിച്ചിരിക്കുന്നു.


കുറിപ്പ്: തിരിവുകൾക്ക് പകരം ഡിഗ്രികൾ ഉപയോഗിക്കാൻ, തിരിവ് കണക്കുകൂട്ടലുകളെ 360 കൊണ്ട് ഗുണിക്കുക.
എക്സ്റ്റൻഷൻ പരേഡ് റൂട്ട്
വിദ്യാർത്ഥികൾക്ക് ഒരു അധിക വെല്ലുവിളി ആവശ്യമുണ്ടെങ്കിൽ, നിങ്ങൾക്ക് പരേഡ് റൂട്ട് പല തരത്തിൽ നീട്ടാൻ കഴിയും. ഇതൊരു ഉദാഹരണമാണ്, സാധ്യമായ ഒരു പരിഹാരവും.
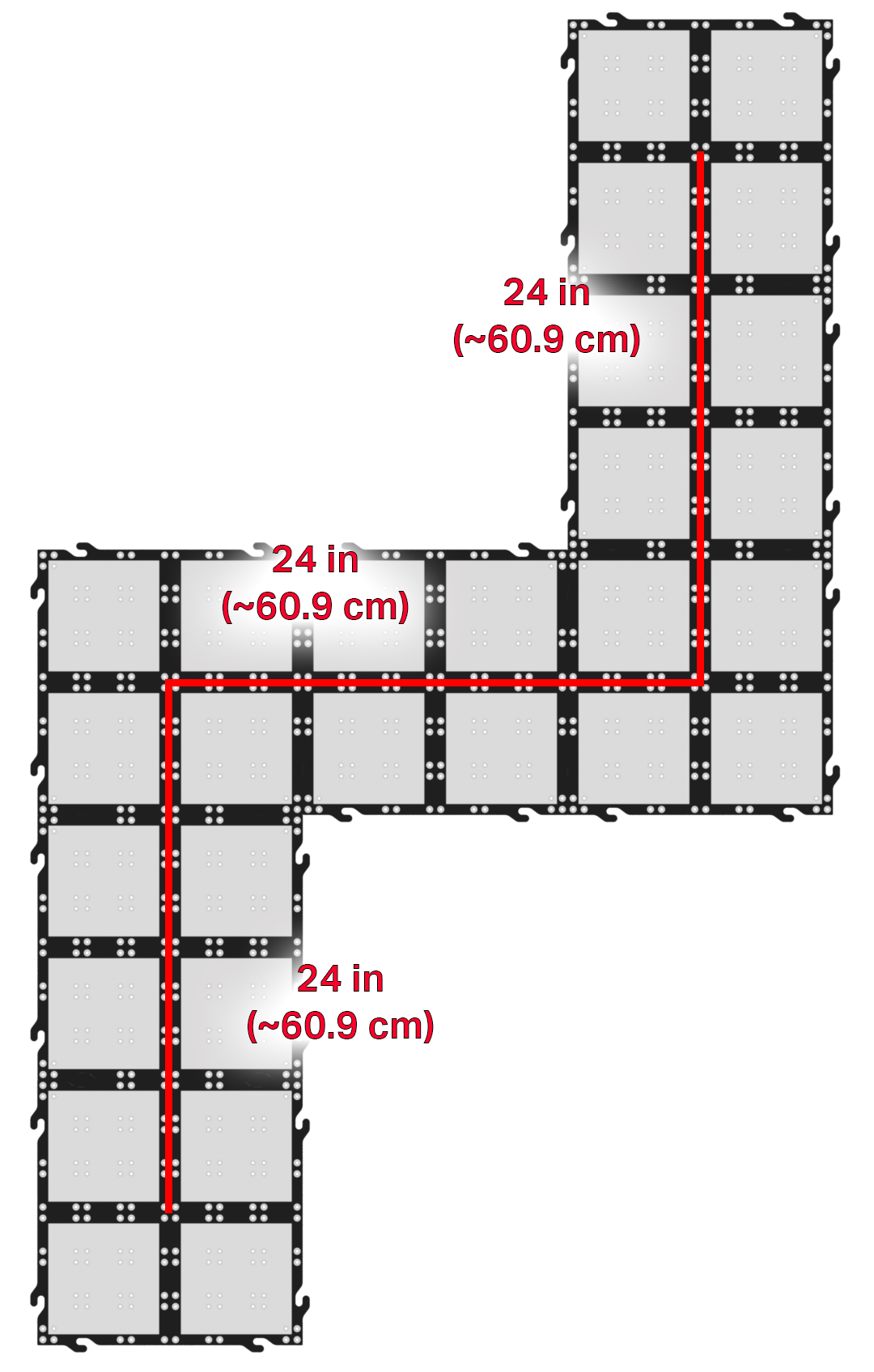
ഈ ഉദാഹരണ റൂട്ടിൽ, ലാബ്സിൽ നിന്ന് ഡ്രൈവിംഗ് ദൂരങ്ങളും തിരിവുകളും പകുതിയായി കുറച്ചിരിക്കുന്നു. എന്നിരുന്നാലും, ഈ റൂട്ടിൽ, തിരിവുകളുടെ ദിശ പ്രധാനമാണ്. വീണ്ടും കണക്കുകൂട്ടുന്നതിനു പുറമേ, ആവശ്യമുള്ള ദിശയിലേക്ക് തിരിയുന്നതിന് ചക്രങ്ങൾ കറക്കുന്നതിനുള്ള ദിശകൾ വിദ്യാർത്ഥികൾ കണ്ടെത്തേണ്ടതുണ്ട്.
മുൻ ലാബുകളിൽ നിന്നുള്ള പകുതിയാക്കിയ കണക്കുകൂട്ടലുകൾ ഇപ്രകാരമാണ്:
ഡ്രൈവിംഗ് ദൂരം = ~ 3.84 തിരിവുകൾ
തിരിവുകൾ ദൂരം = ~ 0.73 തിരിവുകൾ
ഈ മൂല്യങ്ങൾ ഇനിപ്പറയുന്ന ഉദാഹരണത്തിലെ VEXcode GO സൊല്യൂഷനിൽ ഉപയോഗിക്കുന്നു:
