
Dukungan Matematika
Saat mengajarkan Lab 4 dan 5, konsep dan perhitungan matematika tambahan dilibatkan. Halaman ini menawarkan kepada guru sumber daya latar belakang yang relevan untuk mendukung matematika yang sedang dijelajahi siswa di Lab ini.
Matematika Mengemudi
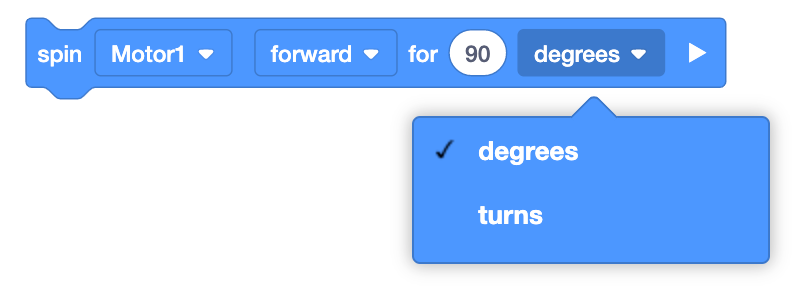
Untuk melengkapi parade di Lab 4, para siswa akan mengendarai kendaraan hias Basis Kode mereka di sepanjang jarak rute parade lurus. Alih-alih menggunakan blok drivetrain yang menggerakkan kedua roda secara bersamaan, siswa akan menggunakan blok [Putar untuk] di VEXcode GO, seperti yang ditunjukkan di sini, untuk memutar motor yang terhubung ke roda dan menggerakkan robot maju. Blok [Putar untuk] menerima 'putaran' atau 'derajat' sebagai parameter. Di Lab 4, siswa akan menghitung jumlah putaran yang akan dimasukkan ke dalam proyek ini untuk menggerakkan robot mereka menempuh jarak rute parade.
Tonton video di bawah ini untuk mempelajari cara menghitung jumlah putaran roda yang diperlukan untuk menggerakkan robot Anda lurus pada jarak tertentu.
Referensi Bermanfaat:
Terminologi dan Nilai untuk Roda Abu-abu:
| Ketentuan | Definisi | Visual | Rumus | Nilai |
|---|---|---|---|---|
| Diameter | Pengukuran garis lurus melintasi pusat lingkaran | 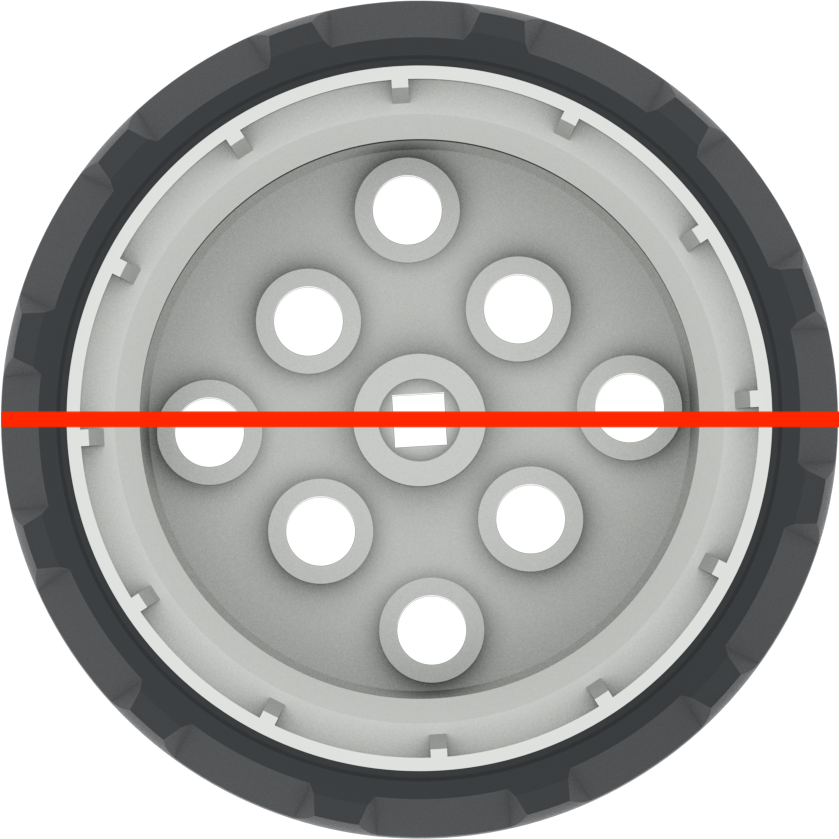 |
d = 2 r | ~ 50,93 mm atau 2 inci |
| Lingkar | Jarak total di sekitar bagian luar lingkaran |  |
C = π d | ~ 160 mm atau 6,25 inci |
Mengukur Secara Akurat
Saat siswa mengukur, pastikan untuk membimbing mereka untuk mengukur dengan cermat dan tepat. Anda dapat menggunakanPenggaris VEX GO yang Dapat Dicetakuntuk diukur siswa, atau penggaris kelas.
- Ingatkan siswa untuk mulai mengukur dari titik nol pada penggaris, dan perhatikan dengan saksama titik akhir objek yang mereka ukur. Memulai atau mengakhiri pengukuran secara tidak akurat akan memengaruhi perhitungan mereka dan pergerakan robot mereka pada akhirnya.
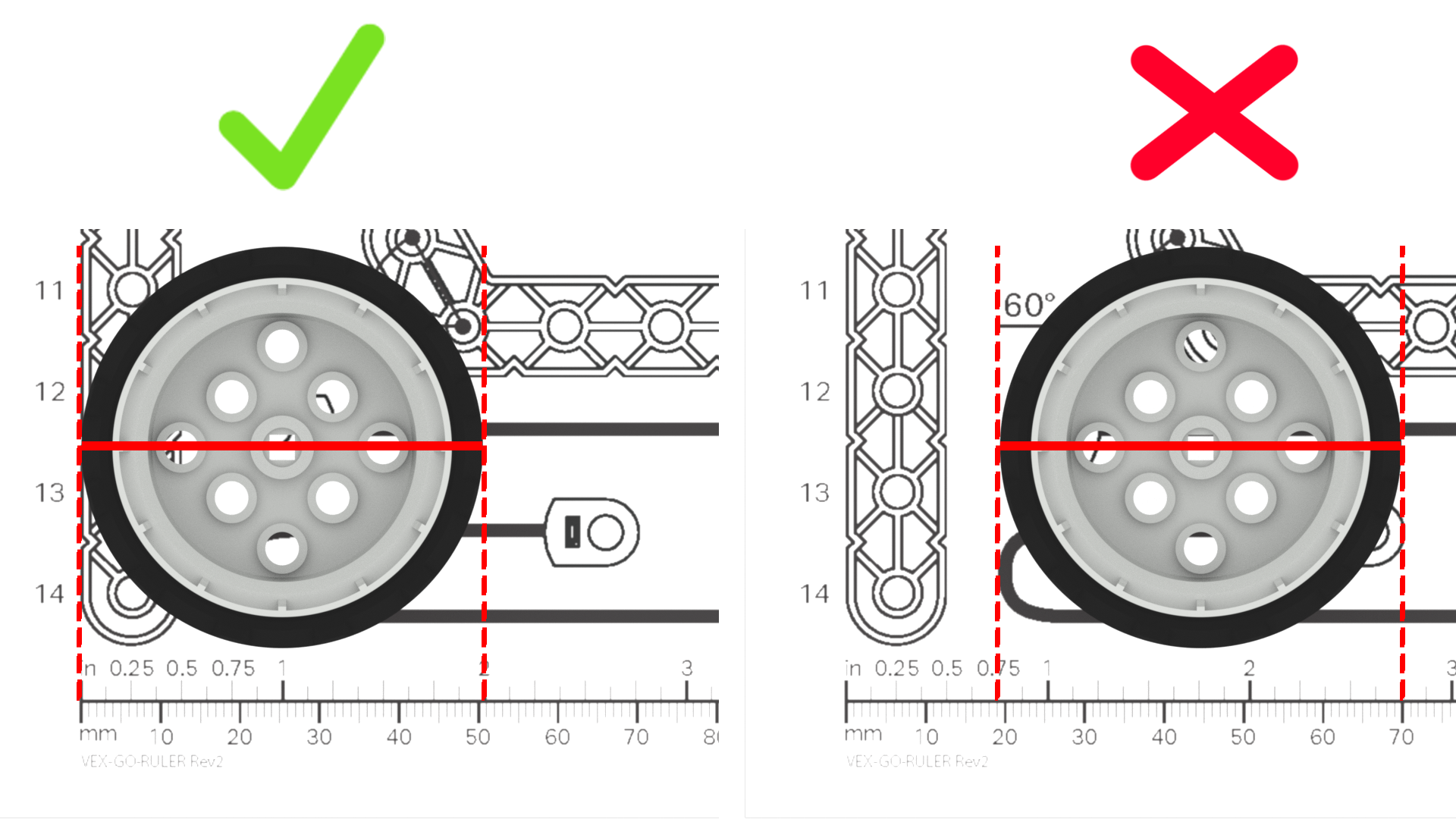
- Pastikan siswa mengetahui cara membaca tanda pada penggaris yang mereka gunakan, untuk mengukur secara akurat. Jika penggaris yang Anda gunakan memiliki satuan imperial dan metrik (seperti pada Penggaris VEX GO yang Dapat Dicetak), pastikan bahwa siswa secara konsisten menggunakan satuan ukuran yang sama.

- Siswa dapat membulatkan pengukurannya ke satuan terdekat, atau pecahan suatu satuan. Pembulatan dapat membuat perhitungan lebih sederhana, jika diperlukan; tetapi juga dapat membuat pengukuran kurang tepat. Misalnya, Anda dapat menginstruksikan siswa untuk membulatkan ke setengah inci atau sentimeter terdekat, tetapi robot mereka bergerak sedikit lebih jauh dari yang awalnya dimaksudkan. Alternatifnya, Anda dapat meminta siswa mengukur hingga ⅛ inci atau milimeter terdekat dan menemukan bahwa robot mereka bergerak mendekati jarak yang dituju.
- Jika siswa memerlukan latihan tambahan dalam mengukur, Anda dapat menggunakan Latihan Mengukur Aktivitas VEX GO dengan siswa atau kelompok secara individu, atau sebagai aktivitas kelas secara keseluruhan.
Matematika Berputar 360°
Untuk melengkapi parade di Lab 5, para siswa akan mengendarai kendaraan hias Basis Kode mereka di sepanjang rute parade dengan putaran.
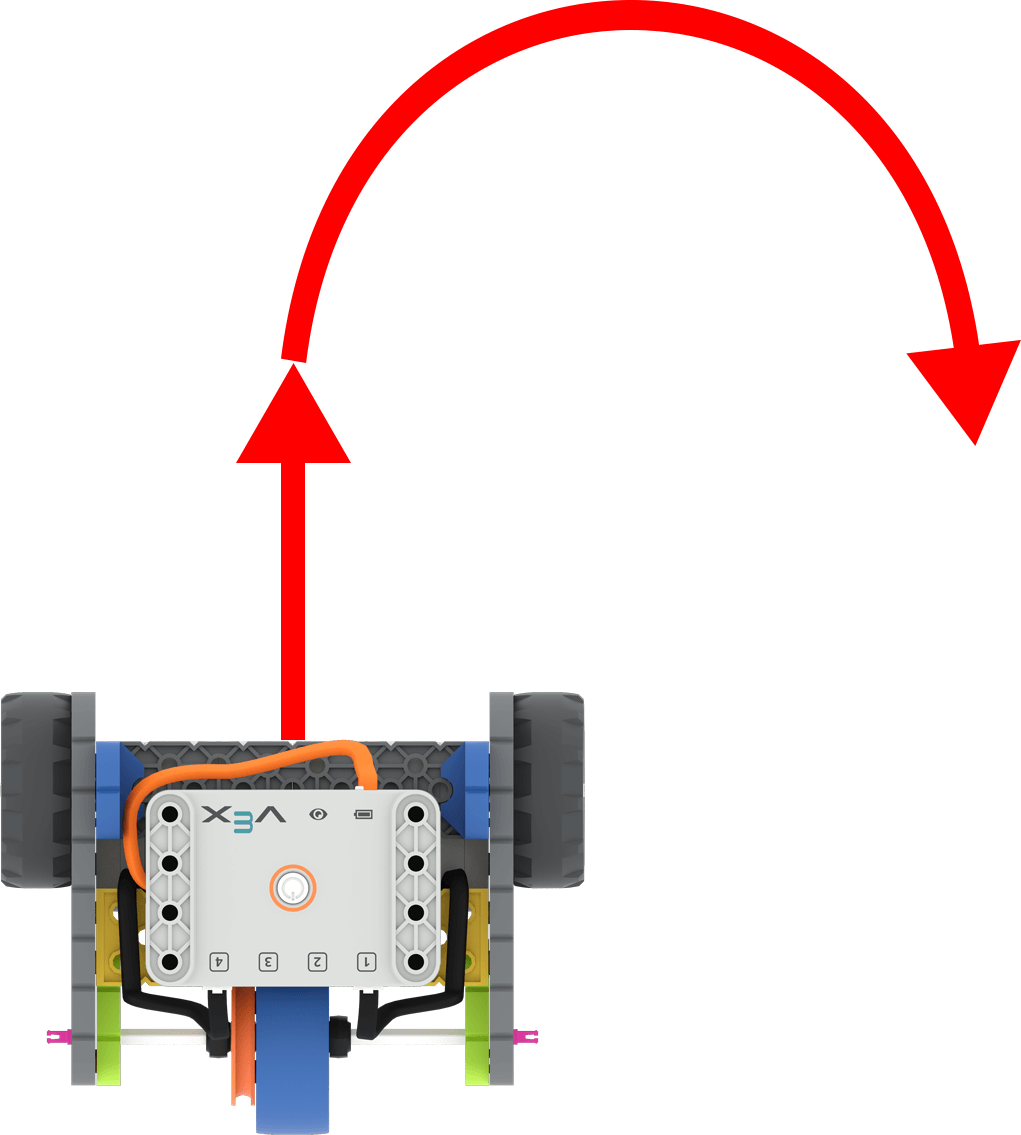
Basis Kode dengan panah untuk menunjukkan mengemudi maju dan kemudian berbelok ke kanan
Siswa akan mengembangkan apa yang telah mereka pelajari tentang pengodean robot untuk menempuh jarak garis lurus, pengodean robot untuk melaju dalam jarak non-linier, atau belokan. Siswa masih menghitung jumlah putaran yang dibutuhkan untuk menempuh jarak tertentu, jadi mereka akan menggunakan rumus yang sama seperti pada Lab sebelumnya.
Tonton video di bawah ini untuk mempelajari cara menghitung jumlah putaran roda yang diperlukan untuk menggerakkan robot 360° putaran bersama siswa Anda.
Referensi Bermanfaat:
Saat Basis Kode berputar, roda penggerak bergerak ke arah berlawanan untuk memutar robot. Misalnya, untuk membelokkan robot ke kanan, roda kiri akan bergerak maju, sedangkan roda kanan akan bergerak mundur.
Terminologi dan Nilai untuk Basis Kode:
| Ketentuan | Definisi | Visual | Rumus | Nilai |
|---|---|---|---|---|
| Diameter | Pengukuran garis lurus dari pusat setiap roda (juga dikenal sebagai jarak sumbu roda) |  |
d = 2 r | ~ 135 mm atau 5,3 inci |
| Lingkar | Total jarak yang ditempuh roda untuk menyelesaikan putaran 360° |  |
C = π d | ~ 424 mm atau 16,7 inci |
Matematika untuk Mengubah Gelar Apa Pun
Tonton video ini untuk mempelajari lebih lanjut tentang cara menghitung jumlah putaran roda yang dibutuhkan robot untuk berbelok pada derajat apa pun.
Konversi ke Derajat
Blok [Putar untuk] akan menerima putaran atau derajat sebagai parameter. Untuk menggunakan derajat, kalikan saja jumlah putaran dengan 360. Contoh ini menunjukkan jumlah derajat putaran motor untuk memutar robot sepenuhnya°. Perhatikan bahwa dalam proyek ini motor berputar dalam arah yang berlawanan, dan 'dan jangan menunggu' ditambahkan ke blok pertama, sehingga motor berputar secara bersamaan. Ini akan memutar robot ke kanan sesuai keinginan 360°. 
Kesalahpahaman Umum
Ada beberapa kesalahpahaman yang mungkin dimiliki siswa tentang pengukuran dan matematika dalam berkendara dan berbelok. Berikut ini adalah beberapa masalah yang paling umum, beserta saran tentang cara mengatasinya bersama siswa Anda.

 Ingatkan siswa bahwa perhitungan mereka hanya akan berfungsi sebagaimana mestinya jika parameter diatur ke unit yang benar. Putaran dan derajat tidak memiliki nilai yang sama.
Ingatkan siswa bahwa perhitungan mereka hanya akan berfungsi sebagaimana mestinya jika parameter diatur ke unit yang benar. Putaran dan derajat tidak memiliki nilai yang sama.
Contoh Solusi
Contoh Solusi Lab 4
*Catatan: 'dan jangan tunggu' digunakan dengan blok pertama dalam proyek contoh sehingga kedua blok akan dieksekusi secara bersamaan. Tanpa 'dan jangan menunggu', motor pertama akan berputar, kemudian yang kedua, dan Basis Kode tidak akan berjalan sebagaimana mestinya. Pastikan siswa TIDAK menutup 'dan jangan menunggu' atau proyek mereka tidak akan berjalan sebagaimana mestinya.

Untuk menempuh rute parade sepanjang 48 inci (~122 cm), Basis Kode perlu menempuh ~7,68 putaran. Perhitungannya ditunjukkan di sebelah kiri, dan contoh solusi VEXcode GO di sebelah kanan.


Contoh Solusi Lab 5
Untuk menggerakkan rute parade sepanjang 48 inci (~122 cm) dan berputar 180 derajat, Basis Kode perlu bergerak maju sebanyak ~7,68 putaran, lalu memutar satu motor maju dan yang lain mundur sebanyak ~1,47 putaran. Perhitungannya ditunjukkan di samping contoh solusi VEXcode GO di sebelah kanan.


Catatan: Untuk menggunakan derajat, bukan putaran, kalikan perhitungan putaran dengan 360.
Rute Parade Ekstensi
Jika siswa membutuhkan tantangan tambahan, Anda dapat memperluas rute parade dengan berbagai cara. Ini adalah salah satu contoh, dengan kemungkinan solusi.

Dalam rute contoh ini, jarak tempuh dan belokan dikurangi setengahnya dari Lab. Namun, pada rute ini, arah belokan penting. Selain menghitung ulang, siswa harus mencari tahu arah untuk memutar roda agar berbelok ke arah yang diinginkan.
Perhitungan yang dibagi dua dari Lab sebelumnya adalah sebagai berikut:
Jarak tempuh = ~ 3,84 putaran
Jarak putar = ~ 0,73 putaran
Nilai-nilai ini digunakan dalam contoh solusi VEXcode GO berikut:
