
Pelajaran 4: Membangun Proyek
Atur proyek dan mulai
- Mulai proyek teks baru dan pilih Disk Mover Playground saat diminta.
-
Beri nama proyek Unit8Pelajaran4.

-
Dengan menggunakan perilaku yang baru saja diidentifikasi, tambahkan komentar berikut untuk mengatur proyek.
def utama(): # 1. Drive ke disk menggunakan Down Eye Sensor # 2. Ambil disk # 3. Berkendara ke tujuan menggunakan Sensor Jarak # 4. Jatuhkan cakram di sasaran #5. Berbalik dan melaju ke tujuan berikutnya -
Buat kode berikut yang menginstruksikan Robot VR untuk menyelesaikan empat perilaku pertama yang tercantum di atas. Proyek ini akan menggunakan perintah yang sama yang digunakan dalam pelajaran sebelumnya untuk memindahkan disk menggunakan umpan balik sensor. Proyek Anda akan terlihat seperti ini:
def utama(): # 1. Berkendara ke disk menggunakan Down Eye Sensor saat tidak down_eye.near_object(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() # 2. Ambil disk magnet.energize(BOOST) # 3. Berkendara ke tujuan menggunakan Sensor Jarak drivetrain.turn_to_heading(180, DEGREES) while front_distance.get_distance(MM) > 200: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain. berhenti() # 4. Jatuhkan cakram pada sasaran magnet.beri energi(DROP) # 5. Berbalik dan melaju ke tujuan berikutnya - Buka Jendela Taman Bermain jika belum terbuka. PastikanDisk Mover Playgroundterbuka, dan jalankan proyek.
-
Saat proyek ini dijalankan, Robot VR akan melaju dan mengambil cakram biru pertama, berbalik arah, melaju ke sasaran biru, dan menjatuhkan cakram tersebut.

Putar dan gerakkan ke set cakram berikutnya
-
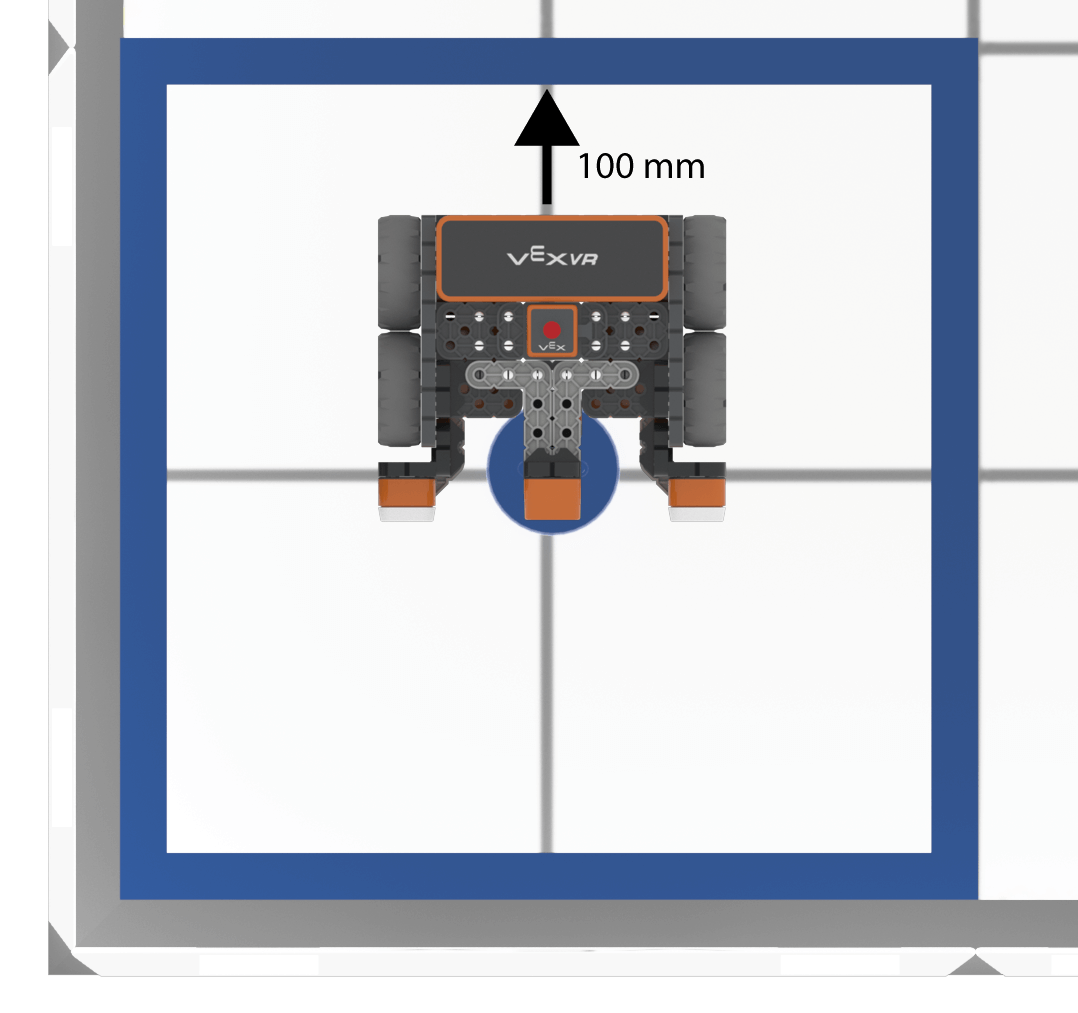
Untuk mengumpulkan cakram berwarna berikutnya, Robot VR perlu berputar dan melaju menuju sasaran berwarna berikutnya. Menggunakan apa yang kita pelajari pada pelajaran sebelumnya, untuk mencegah tabrakan dengan cakram di gawang, Robot VR sekarang harus menyingkir dari jalur cakram tersebut. Untuk melakukan ini, Robot VR perlu mundur 100 milimeter (mm), atau setengah panjang kotak kisi di Taman Bermain.
-
Tambahkan perintah drive_for di bawah perintah energize , dan atur parameter ke “REVERSE” untuk 100 milimeter (mm), sehingga bagian komentar keempat dari proyek terlihat seperti ini:
Nomor 4. Jatuhkan disk di tujuan magnet.energize(DROP) drivetrain.drive_for(REVERSE, 100, MM) - Robot VR sekarang perlu berbelok ke kiri untuk menghadapi sasaran berwarna berikutnya.

-
Tambahkan perintah turn_to_headingdi bawah komentar kelima dan atur parameter ke 90 derajat agar Robot VR dapat menghadapi sasaran berikutnya, sehingga bagian kelima proyek tampak seperti ini:
Nomor 5. Belok dan kendarai ke tujuan berikutnya drivetrain.turn_to_heading(90, DEGREES) -
Berikutnya, Robot VR perlu melaju ke arah gawang berwarna berikutnya. Perhatikan bahwa Robot VR harus bergerak maju empat kotak kisi, atau 800 milimeter (mm) untuk dapat mencapai pusat gawang berwarna berikutnya.

-
Tambahkan perintah drive_forsetelah perintah turn_to_heading dan atur parameter ke depan 800 milimeter (mm), sehingga bagian kelima tampak seperti ini:
Nomor 5. Belok dan kendarai ke tujuan berikutnya drivetrain.turn_to_heading(90, DEGREES) drivetrain.drive_for(FORWARD, 800, MM) -
Robot VR sekarang perlu berbalik menghadap cakram berwarna.

-
Tambahkan komentar lain dan perintah turn_to_heading kedua di akhir proyek, dan atur parameter ke nol derajat. Ini akan memutar Robot VR untuk menghadap cakram berwarna. Pastikan perintah-perintah diindentasi dengan benar dalam proyek Anda.
Nomor 6. Beralih ke disk drivetrain.turn_to_heading(0, DEGREES) - Buka Disk Mover Playgroundjika belum terbuka, dan jalankan proyeknya.
-
Robot VR akan mengambil dan menggerakkan cakram biru pertama ke gawang biru, lalu melaju melewati gawang merah. Robot VR juga akan berbalik menghadap cakram merah.

Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.