
পাঠ ৪: প্রকল্পটি তৈরি করা
প্রকল্পটি সংগঠিত করুন এবং শুরু করুন
- একটি নতুন পাঠ্য প্রকল্প শুরু করুন এবং অনুরোধ করা হলে ডিস্ক মুভার প্লেগ্রাউন্ড নির্বাচন করুন৷
-
প্রকল্পটির নাম দিন Unit8Lesson4।

-
এইমাত্র চিহ্নিত আচরণগুলি ব্যবহার করে, প্রকল্পটি সংগঠিত করতে নিম্নলিখিত মন্তব্যগুলি যোগ করুন।
ডিফল্ট মেইন(): # ১। ডাউন আই সেন্সর # ২ ব্যবহার করে ডিস্কে ড্রাইভ করুন। ডিস্ক #৩ তুলে নাও। দূরত্ব সেন্সর # ৪ ব্যবহার করে লক্ষ্যে যান। লক্ষ্য #৫-এ ডিস্ক ফেলে দিন। ঘুরুন এবং পরবর্তী লক্ষ্যে গাড়ি চালান -
নিম্নলিখিত কোডটি তৈরি করুন যা VR রোবটকে উপরে তালিকাভুক্ত প্রথম চারটি আচরণ সম্পূর্ণ করার নির্দেশ দেয়। এই প্রকল্পে সেন্সর ফিডব্যাক ব্যবহার করে ডিস্ক সরানোর জন্য আগের পাঠে ব্যবহৃত একই কমান্ড ব্যবহার করা হবে। আপনার প্রকল্পটি দেখতে এরকম হওয়া উচিত:
ডিফল্ট মেইন(): # ১। ডাউন আই সেন্সর ব্যবহার করে ডিস্কে ড্রাইভ করুন, down_eye.near_object() ব্যবহার না করে: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() # 2। ডিস্ক magnet.energize(BOOST) # 3 তুলে নাও। দূরত্ব সেন্সর ব্যবহার করে লক্ষ্যে যান drivetrain.turn_to_heading(180, DEGREES) যখন front_distance.get_distance(MM) > 200: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain। স্টপ() # ৪। গোল magnet.energize(DROP) # 5 এ ডিস্কটি ফেলে দিন। ঘুরুন এবং পরবর্তী লক্ষ্যে গাড়ি চালান - খেলার মাঠের উইন্ডোটি খুলুন যদি এটি ইতিমধ্যে খোলা না থাকে। নিশ্চিত করুন যেডিস্ক মুভার প্লেগ্রাউন্ডখোলে, এবং প্রকল্পটি চালান।
-
যখন এই প্রকল্পটি চালানো হবে, তখন VR রোবট গাড়ি চালাবে এবং প্রথম নীল ডিস্কটি তুলে নেবে, ঘুরবে, নীল লক্ষ্যে ড্রাইভ করবে এবং ডিস্কটি ফেলে দেবে।

ডিস্কের পরবর্তী সেটে ঘুরুন এবং ড্রাইভ করুন
-
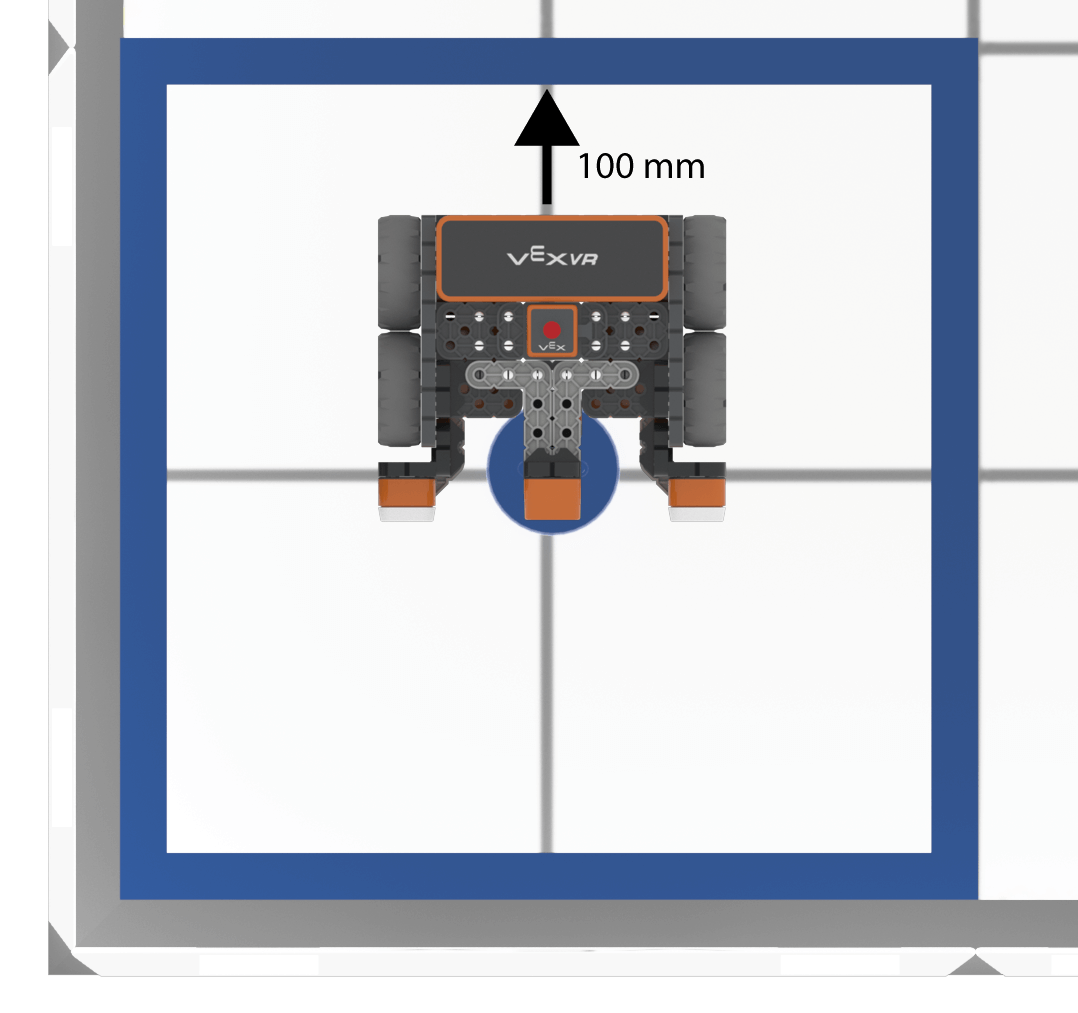
পরবর্তী রঙিন ডিস্ক সংগ্রহ করার জন্য, VR রোবটকে ঘুরতে হবে এবং পরবর্তী রঙিন লক্ষ্যের দিকে ড্রাইভ করতে হবে। আমরা আগের পাঠে যা শিখেছি তা ব্যবহার করে, লক্ষ্যে ডিস্কের সাথে সংঘর্ষ প্রতিরোধ করার জন্য, VR রোবটকে এখন ডিস্কের পথের বাইরে যেতে হবে। এটি করার জন্য, VR রোবটকে 100 মিলিমিটার (মিমি), বা খেলার মাঠে একটি গ্রিড স্কোয়ারের দৈর্ঘ্যের অর্ধেক বিপরীত করতে হবে।
-
energize কমান্ডের নিচে একটি drive_for কমান্ড যোগ করুন এবং 100 মিলিমিটার (মিমি) এর জন্য প্যারামিটারটিকে "REVERSE" এ সেট করুন, যাতে প্রকল্পের চতুর্থ মন্তব্য বিভাগটি এইরকম দেখাবে:
# 4। গোল এ ডিস্ক ড্রপ করুন magnet.energize(DROP) drivetrain.drive_for(REVERSE, 100, MM) - VR রোবটটিকে এখন পরবর্তী রঙিন লক্ষ্যের মুখোমুখি হতে বাম দিকে ঘুরতে হবে।

-
পঞ্চম মন্তব্যের নিচে একটি turn_to_headingকমান্ড যোগ করুন এবং VR রোবটকে পরবর্তী লক্ষ্যের মুখোমুখি করার জন্য প্যারামিটারটি 90 ডিগ্রিতে সেট করুন, যাতে প্রকল্পের পঞ্চম অংশটি এইরকম দেখায়:
# 5। ঘুরুন এবং পরবর্তী লক্ষ্যে যান ড্রাইভট্রেন।turn_to_heading(90, DEGREES) -
এর পরে, ভিআর রোবটকে পরবর্তী রঙিন লক্ষ্যে এগিয়ে যেতে হবে। মনে রাখবেন যে VR রোবটকে পরবর্তী রঙিন লক্ষ্যের কেন্দ্রে যাওয়ার জন্য চারটি গ্রিড স্কোয়ার বা 800 মিলিমিটার (মিমি) এগিয়ে যেতে হবে।

-
turn_to_heading কমান্ডের পরে একটি drive_forকমান্ড যোগ করুন এবং প্যারামিটারটি 800 মিলিমিটার (মিমি) ফরোয়ার্ডে সেট করুন, যাতে পঞ্চম বিভাগটি এইরকম দেখাবে:
# 5। ঘুরুন এবং পরবর্তী লক্ষ্যে যান drivetrain.turn_to_heading(90, DEGREES) drivetrain.drive_for(FORWARD, 800, MM) -
VR রোবটটিকে এখন রঙিন ডিস্কগুলির মুখোমুখি হতে হবে।

-
প্রকল্পের শেষে আরেকটি মন্তব্য এবং দ্বিতীয় turn_to_heading কমান্ড যোগ করুন, এবং প্যারামিটারটি শূন্য ডিগ্রিতে সেট করুন। এটি ভিআর রোবটটিকে রঙিন ডিস্কের মুখোমুখি করবে। আপনার প্রকল্পের মধ্যে কমান্ডগুলি সঠিকভাবে ইন্ডেন্ট করা আছে কিনা তা নিশ্চিত করুন।
# 6। ডিস্কে ঘুরুন ড্রাইভট্রেন.turn_to_heading(0, DEGREES) - যদি ডিস্ক মুভার প্লেগ্রাউন্ডইতিমধ্যে খোলা না থাকে, তাহলে এটি খুলুন এবং প্রকল্পটি চালান।
-
ভিআর রোবট প্রথম নীল ডিস্কটিকে নীল গোলে নিয়ে যাবে এবং তারপর লাল গোলের উপর দিয়ে গাড়ি চালাবে। VR রোবটও লাল ডিস্কের মুখোমুখি হবে।

এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।