
पाठ 4: परियोजना का निर्माण करें
परियोजना को व्यवस्थित करें और आरंभ करें
- एक नया टेक्स्ट प्रोजेक्ट शुरू करें और संकेत मिलने पर डिस्क मूवर प्लेग्राउंड का चयन करें।
-
प्रोजेक्ट का नाम यूनिट8लेसनरखें.

-
अभी पहचाने गए व्यवहारों का उपयोग करते हुए, परियोजना को व्यवस्थित करने के लिए निम्नलिखित टिप्पणियाँ जोड़ें।
def मुख्य(): # 1. डाउन आई सेंसर # 2 का उपयोग करके डिस्क पर ड्राइव करें। डिस्क # 3 उठाओ. दूरी सेंसर # 4 का उपयोग करके लक्ष्य तक ड्राइव करें। लक्ष्य # 5 में डिस्क ड्रॉप. मुड़ें और अगले लक्ष्य की ओर बढ़ें -
निम्नलिखित कोड बनाएं जो VR रोबोट को ऊपर सूचीबद्ध पहले चार व्यवहारों को पूरा करने का निर्देश देता है। यह परियोजना उन्हीं कमांडों का उपयोग करेगी जो सेंसर फीडबैक का उपयोग करके डिस्क को स्थानांतरित करने के लिए पिछले पाठ में उपयोग किए गए थे। आपका प्रोजेक्ट इस तरह दिखना चाहिए:
def मुख्य(): # 1. डाउन आई सेंसर का उपयोग करके डिस्क पर ड्राइव करें जब तक down_eye.near_object() न हो: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() # 2. डिस्क चुंबक उठाओ.एनर्जाइज़ (बूस्ट) # 3. दूरी सेंसर का उपयोग करके लक्ष्य तक ड्राइव करें drivetrain.turn_to_heading(180, DEGREES) while front_distance.get_distance(MM) > 200: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain. स्टॉप() # 4. लक्ष्य चुंबक में डिस्क ड्रॉप करें। ऊर्जा (ड्रॉप) # 5। मुड़ें और अगले लक्ष्य की ओर बढ़ें - यदि प्लेग्राउंड विंडो पहले से खुली नहीं है तो उसे खोलें। सुनिश्चित करें किडिस्क मूवर प्लेग्राउंडखुलता है, और प्रोजेक्ट को चलाएं।
-
जब यह परियोजना चलाई जाएगी, तो वीआर रोबोट गाड़ी चलाएगा और पहली नीली डिस्क उठाएगा, घूमेगा, नीले लक्ष्य तक जाएगा, और डिस्क को नीचे गिरा देगा।

मुड़ें और डिस्क के अगले सेट पर जाएं
-
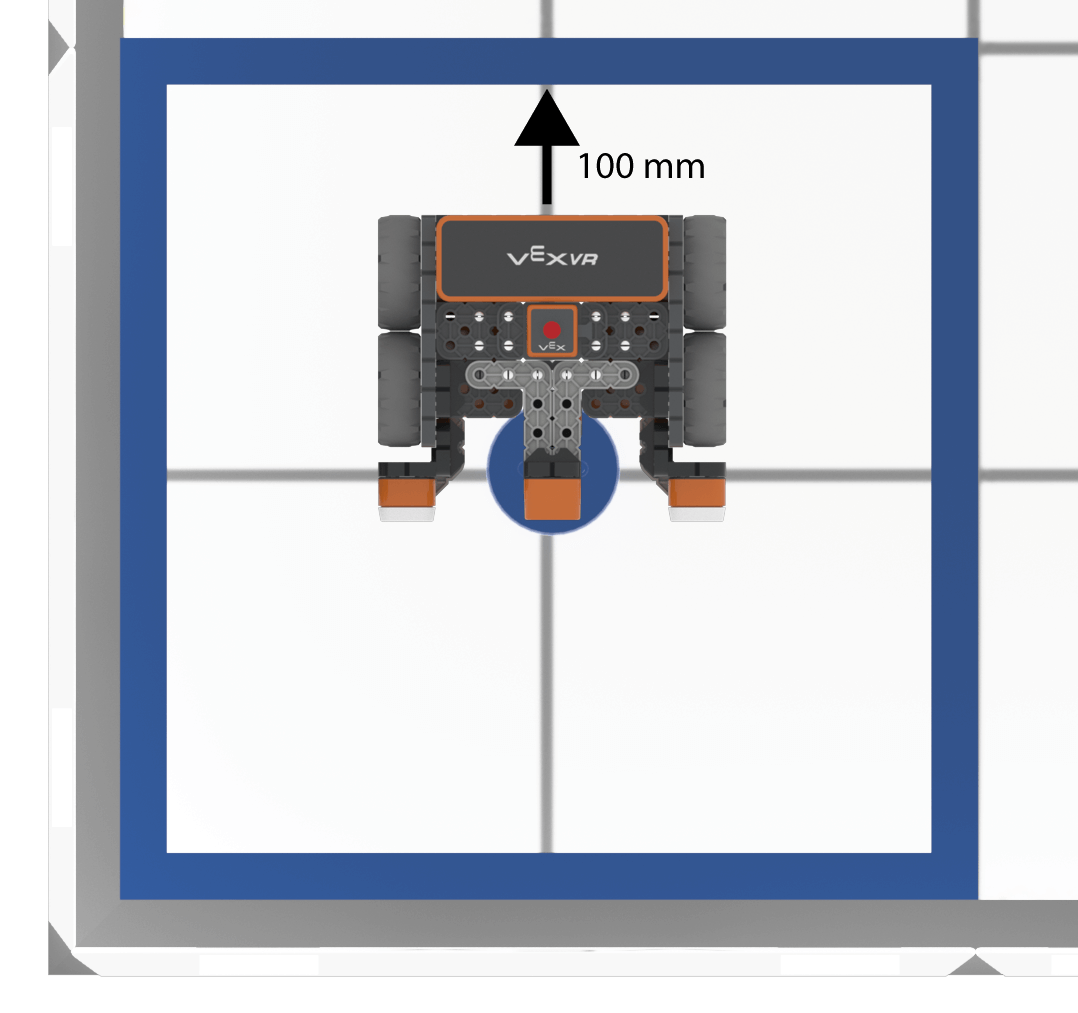
अगली रंगीन डिस्क एकत्र करने के लिए, वीआर रोबोट को मुड़ना होगा और अगले रंगीन लक्ष्य की ओर बढ़ना होगा। पिछले पाठ में हमने जो सीखा था, उसका उपयोग करते हुए, लक्ष्य में डिस्क से टकराने से बचने के लिए, वीआर रोबोट को अब डिस्क के रास्ते से हटना होगा। ऐसा करने के लिए, वीआर रोबोट को खेल के मैदान पर 100 मिलीमीटर (मिमी) या ग्रिड वर्ग की आधी लंबाई को उलटना होगा।
-
energize कमांड के नीचे drive_for कमांड जोड़ें, और 100 मिलीमीटर (मिमी) के लिए पैरामीटर को “REVERSE” पर सेट करें, ताकि परियोजना का चौथा टिप्पणी अनुभाग इस तरह दिखे:
# 4. लक्ष्य में डिस्क गिराएँ magnet.energize(DROP) drivetrain.drive_for(REVERSE, 100, MM) - वीआर रोबोट को अब अगले रंगीन लक्ष्य का सामना करने के लिए बाईं ओर मुड़ना होगा।

-
पांचवीं टिप्पणी के नीचे turn_to_headingकमांड जोड़ें और वीआर रोबोट को अगले लक्ष्य का सामना करने के लिए पैरामीटर को 90 डिग्री पर सेट करें, इसलिए परियोजना का पांचवां भाग इस तरह दिखता है:
# 5. मुड़ें और अगले लक्ष्य की ओर बढ़ें drivetrain.turn_to_heading(90, DEGREES) -
इसके बाद, वीआर रोबोट को अगले रंगीन लक्ष्य की ओर आगे बढ़ना होगा। ध्यान दें कि वीआर रोबोट को अगले रंगीन लक्ष्य के केंद्र तक पहुंचने के लिए चार ग्रिड वर्ग या 800 मिलीमीटर (मिमी) आगे बढ़ना होगा।

-
turn_to_heading कमांड के बाद drive_forकमांड जोड़ें और पैरामीटर को 800 मिलीमीटर (मिमी) आगे सेट करें, ताकि पांचवां भाग इस तरह दिखे:
# 5. मुड़ें और अगले लक्ष्य की ओर बढ़ें drivetrain.turn_to_heading(90, DEGREES) drivetrain.drive_for(FORWARD, 800, MM) -
अब वीआर रोबोट को रंगीन डिस्क की ओर मुड़ना होगा।

-
प्रोजेक्ट के अंत में एक और टिप्पणी और दूसरा turn_to_heading कमांड जोड़ें, और पैरामीटर को शून्य डिग्री पर सेट करें। इससे वीआर रोबोट रंगीन डिस्क की ओर मुड़ जाएगा। सुनिश्चित करें कि आपके प्रोजेक्ट में कमांड सही ढंग से इंडेंट किए गए हैं।
# 6. डिस्क पर जाएँ drivetrain.turn_to_heading(0, DEGREES) - यदि मूवर प्लेग्राउंडपहले से खुला नहीं है तो उसे खोलें और प्रोजेक्ट चलाएं।
-
वी.आर. रोबोट पहली नीली डिस्क को उठाकर नीले गोल में ले जाएगा, और फिर लाल गोल के ऊपर से चलाएगा। वीआर रोबोट भी लाल डिस्क की ओर मुड़ जाएगा।

इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।