
4과: 프로젝트 구축
프로젝트를 구성하고 시작하세요
- 새 텍스트 프로젝트를 시작하고 메시지가 표시되면 Disk Mover Playground 선택합니다.
-
프로젝트 이름을 Unit8Lesson4로 지정하세요.

-
방금 식별된 동작을 사용하여 다음과 같은 주석을 추가하여 프로젝트를 구성합니다.
def main(): # 1. 다운 아이 센서 # 2를 사용하여 디스크로 드라이브합니다. 디스크 # 3을 집어 올리세요. 거리 센서 # 4를 사용하여 목표 지점까지 주행하세요. 골 # 5에 디스크를 놓습니다. 방향을 돌려 다음 목표로 이동하세요 -
위에 나열된 처음 네 가지 행동을 완료하도록 VR 로봇에 지시하는 다음 코드를 작성하세요. 이 프로젝트에서는 센서 피드백을 사용하여 디스크를 이동하기 위해 이전 수업에서 사용했던 것과 동일한 명령을 사용합니다. 프로젝트는 다음과 같아야 합니다.
def main(): # 1. Down Eye Sensor 을 사용하여 디스크로 드라이브합니다. down_eye.near_object()가 아닌 경우: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() # 2. 디스크 집어 올립니다. magnet.energize(BOOST) # 3. 거리 센서를 사용하여 목표 지점까지 주행 drivetrain.turn_to_heading(180, DEGREES) while front_distance.get_distance(MM) > 200: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain. stop() # 4. 목표 에 디스크를 놓습니다. magnet.energize(DROP) # 5. 방향을 돌려 다음 목표로 이동하세요 - 아직 열려 있지 않으면 놀이터 창을 엽니다. Disk Mover Playground이 열리고 프로젝트를 실행하세요.
-
이 프로젝트를 실행하면, VR 로봇이 주행하여 첫 번째 파란색 디스크를 집어 들고, 돌아서서 파란색 목표 지점으로 주행한 후 디스크를 떨어뜨립니다.

방향을 바꾸고 다음 디스크 세트로 이동하세요.
-
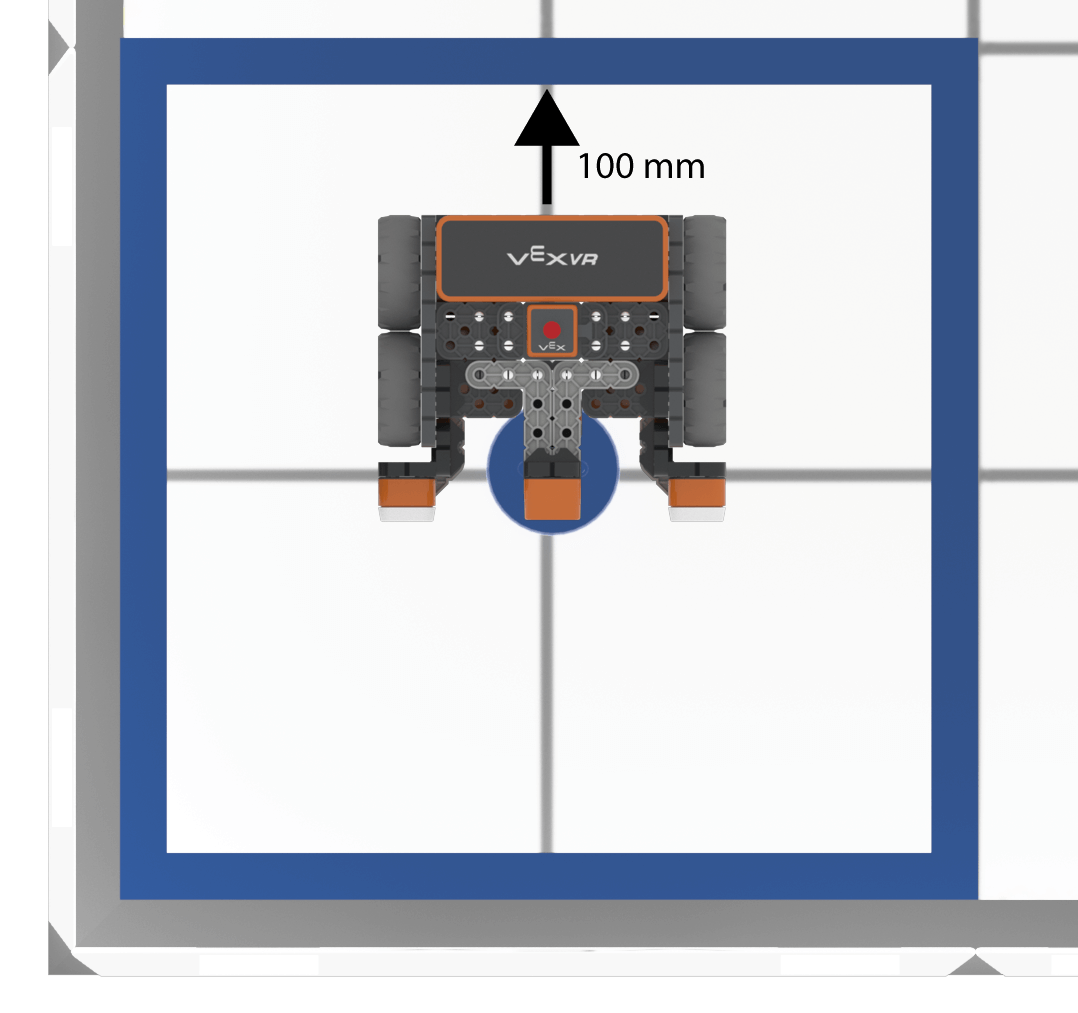
다음 색깔 디스크를 모으려면 VR 로봇이 방향을 바꾸고 다음 색깔 목표를 향해 달려가야 합니다. 이전 수업에서 배운 내용을 활용해서, 목표 지점에서 디스크와 충돌하는 것을 막기 위해, VR 로봇은 이제 디스크의 길에서 벗어나야 합니다. 이를 위해 VR 로봇은 놀이터의 격자 사각형 길이의 절반인 100밀리미터(mm)를 반전해야 합니다.
-
energize 명령 아래에 drive_for 명령을 추가하고 매개변수를 100밀리미터(mm)에 대한 "REVERSE"로 설정하면 프로젝트의 네 번째 주석 섹션이 다음과 같이 표시됩니다.
#4. 목표 에 디스크를 놓습니다. magnet.energize(DROP) drivetrain.drive_for(REVERSE, 100, MM) - VR 로봇은 이제 다음 색깔의 목표를 향하기 위해 좌회전해야 합니다.

-
다섯 번째 주석 아래에 turn_to_heading명령을 추가하고 매개변수를 90도로 설정하여 VR 로봇이 다음 목표를 향하도록 하면 프로젝트의 다섯 번째 섹션은 다음과 같습니다.
#5. 방향을 돌려 다음 목표지점으로 이동합니다. drivetrain.turn_to_heading(90, DEGREES) -
다음으로, VR 로봇은 다음 색깔의 목표를 향해 전진해야 합니다. VR 로봇은 다음 색깔의 목표지점의 중앙까지 이동하기 위해서는 4개의 격자칸, 즉 800밀리미터(mm)만큼 앞으로 이동해야 합니다.

-
turn_to_heading 명령 뒤에 drive_for명령을 추가하고 매개변수를 앞으로 800밀리미터(mm)로 설정하면 다섯 번째 섹션이 다음과 같이 표시됩니다.
#5. 방향을 돌려 다음 목표 지점으로 이동합니다. drivetrain.turn_to_heading(90, DEGREES) drivetrain.drive_for(FORWARD, 800, MM) -
이제 VR 로봇은 색깔 있는 디스크를 향해 돌아야 합니다.

-
프로젝트 끝에 또 다른 주석과 두 번째 turn_to_heading 명령을 추가하고 매개변수를 0도로 설정합니다. 이렇게 하면 VR 로봇이 색깔 있는 디스크를 향하게 됩니다. 프로젝트 내에서 명령이 올바르게 들여쓰기되었는지 확인하세요.
#6. 디스크 드라이브트레인으로 전환합니다.turn_to_heading(0, DEGREES) - 아직 열려 있지 않으면 Disk Mover Playground을 열고 프로젝트를 실행합니다.
-
VR 로봇은 첫 번째 파란색 디스크를 들어올려 파란색 골로 옮긴 다음 빨간색 골 위로 이동합니다. VR 로봇도 빨간색 디스크를 향해 돌아설 것입니다.

이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.