
Lektion 4: Bauen Sie das Projekt auf
Organisieren Sie das Projekt und legen Sie los
- Starten Sie ein neues Textprojekt und wählen Sie den Disk Mover Playground, wenn Sie dazu aufgefordert werden.
-
Benennen Sie das Projekt Unit8Lesson4.

-
Fügen Sie anhand der gerade identifizierten Verhaltensweisen die folgenden Kommentare hinzu, um das Projekt zu organisieren.
def main(): # 1. Laufwerk auf Festplatte mit Down Eye Sensor # 2. Nehmen Sie die Festplatte # 3 auf. Fahren Sie mit dem Abstandssensor # 4 zum Tor. Legen Sie die Festplatte in Ziel Nr. 5 ab. Abbiegen und zum nächsten Ziel fahren -
Erstellen Sie den folgenden Code, der den VR-Roboter anweist, die ersten vier oben aufgeführten Verhaltensweisen auszuführen. Dieses Projekt verwendet die gleichen Befehle, die in der vorherigen Lektion verwendet wurden, um Festplatten mithilfe von Sensor-Feedback zu verschieben. Ihr Projekt sollte wie folgt aussehen:
def main(): # 1. Drive to disk using Down Eye Sensor while not down_eye.near_object(): drivetrain.drive(FORWARD) wait(5, MSEC )drivetrain.stop () # 2. Nimm den Scheibenmagneten auf. Errege (BOOST) # 3. Fahren Sie mit Distance Sensor drivetrain.turn_to_heading (180, DEGREES) zum Ziel, während front_distance.get_distance (MM) > 200 : drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain. stop() # 4. Scheibe ins Tor fallen lassenmagnet.energize (DROP) # 5. Abbiegen und zum nächsten Ziel fahren - Öffnen Sie das Playground-Fenster, wenn es noch nicht geöffnet ist. Stellen Sie sicher, dass sich der Disk Mover Playground öffnet, und führen Sie das Projekt aus.
-
Wenn dieses Projekt ausgeführt wird, fährt der VR-Roboter und nimmt die erste blaue Festplatte auf, dreht sich um, fährt zum blauen Ziel und lässt die Festplatte fallen.

Drehen und fahren Sie zum nächsten Laufwerkssatz
-
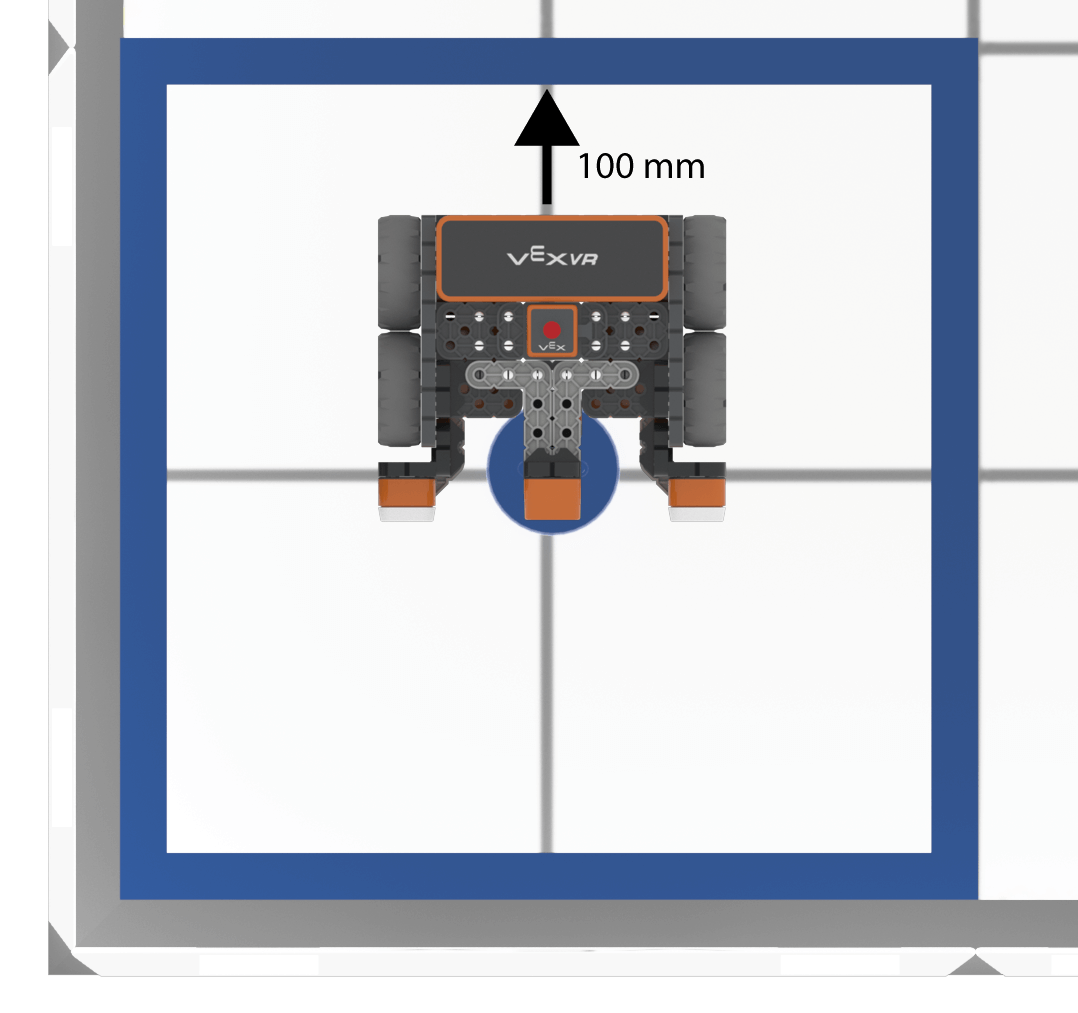
Um die nächste farbige Festplatte zu sammeln, muss sich der VR-Roboter drehen und zum nächsten farbigen Ziel fahren. Nach dem, was wir in der vorherigen Lektion gelernt haben, muss sich der VR-Roboter nun aus dem Weg der Festplatte bewegen, um eine Kollision mit der Festplatte im Ziel zu verhindern. Dazu muss der VR-Roboter 100 Millimeter (mm) oder die Hälfte der Länge eines Gitterquadrats auf dem Spielplatz umkehren.
-
Fügen Sie einen drive_for -Befehl unterhalb des ENERGIZE-Befehls hinzu und setzen Sie den Parameter für 100 Millimeter (mm) auf "REVERSE", sodass der vierte Kommentarabschnitt des Projekts wie folgt aussieht:
# 4. Scheibe ins Tor fallen lassen Magnet.Energieren(FALLEN LASSEN )Antriebsstrang.Antrieb_für (RÜCKWÄRTS, 100, MM) - Der VR-Roboter muss nun nach links abbiegen, um das nächste farbige Ziel zu erreichen.

-
Fügen Sie einen turn_to_ heading-Befehl unter dem fünften Kommentar hinzu und stellen Sie den Parameter auf 90 Grad ein, damit der VR-Roboter das nächste Ziel erreichen kann, sodass der fünfte Abschnitt des Projekts wie folgt aussieht:
# 5. Drehen und fahren Sie zum nächsten Ziel Antriebsstrang. Drehen _nach_Kopf (90, GRAD) -
Als nächstes muss der VR-Roboter zum nächsten farbigen Ziel fahren. Beachten Sie, dass der VR-Roboter vier Gitterquadrate oder 800 Millimeter (mm) vorwärts fahren muss, um in die Mitte des nächsten farbigen Tors zu fahren.

-
Fügen Sie einen drive_ for-Befehl nach dem turn_to_heading-Befehl hinzu und legen Sie den Parameter auf 800 Millimeter (mm) vorwärts fest, sodass der fünfte Abschnitt wie folgt aussieht:
# 5. Drehen und fahren Sie zum nächsten ZielAntriebsstrang.drehen_zu_Kopf (90, GRAD) Antriebsstrang.antreiben_für(VORWÄRTS, 800, MM) -
Der VR-Roboter muss sich nun den farbigen Scheiben zuwenden.

-
Fügen Sie am Ende des Projekts einen weiteren Kommentar und einen zweiten turn_to_heading -Befehl hinzu und setzen Sie den Parameter auf null Grad. Dadurch wird der VR-Roboter so gedreht, dass er den farbigen Festplatten gegenübersteht. Stellen Sie sicher, dass die Befehle in Ihrem Projekt korrekt eingerückt sind.
# 6. Drehen Sie zu Scheibenantrieb. Drehen Sie nach Kopf (0, GRAD) - Öffnen Sie den Disk Mover Playground , wenn er noch nicht geöffnet ist, und führen Sie das Projekt aus.
-
Der VR-Roboter hebt die erste blaue Scheibe auf, bewegt sie in das blaue Tor und fährt dann über das rote Tor. Der VR-Roboter dreht sich auch zu den roten Scheiben.

Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.