
Bài 4: Xây dựng dự án
Tổ chức dự án và bắt đầu
- Bắt đầu một dự án văn bản mới và chọn Disk Mover Playground khi được nhắc.
-
Đặt tên cho dự án Unit8Lesson4.

-
Sử dụng các hành vi vừa được xác định, hãy thêm các bình luận sau để tổ chức dự án.
def main(): # 1. Ổ đĩa sử dụng Cảm biến Down Eye # 2. Lấy đĩa # 3. Lái xe đến đích bằng Cảm biến khoảng cách # 4. Thả đĩa vào mục tiêu # 5. Quay lại và lái xe đến mục tiêu tiếp theo -
Xây dựng đoạn mã sau để hướng dẫn Robot VR hoàn thành bốn hành vi đầu tiên được liệt kê ở trên. Dự án này sẽ sử dụng các lệnh tương tự như trong bài học trước để di chuyển đĩa bằng phản hồi cảm biến. Dự án của bạn sẽ trông như thế này:
def main(): # 1. Truyền dữ liệu vào đĩa bằng Cảm biến Down Eye khi không sử dụng down_eye.near_object(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() # 2. Nhấc đĩa nam châm.kích hoạt(BOOST) # 3. Lái xe đến đích bằng Cảm biến khoảng cách drivetrain.turn_to_heading(180, DEGREES) while front_distance.get_distance(MM) > 200: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain. dừng() # 4. Thả đĩa vào nam châm mục tiêu Kích hoạt(DROP) # 5. Quay lại và lái xe đến mục tiêu tiếp theo - Mở Cửa sổ Sân chơi nếu nó chưa mở. Hãy đảm bảoDisk Mover Playgroundmở ra và chạy dự án.
-
Khi dự án này được chạy, VR Robot sẽ lái và nhặt đĩa màu xanh đầu tiên, quay lại, lái đến mục tiêu màu xanh và thả đĩa.

Quay và lái đến bộ đĩa tiếp theo
-
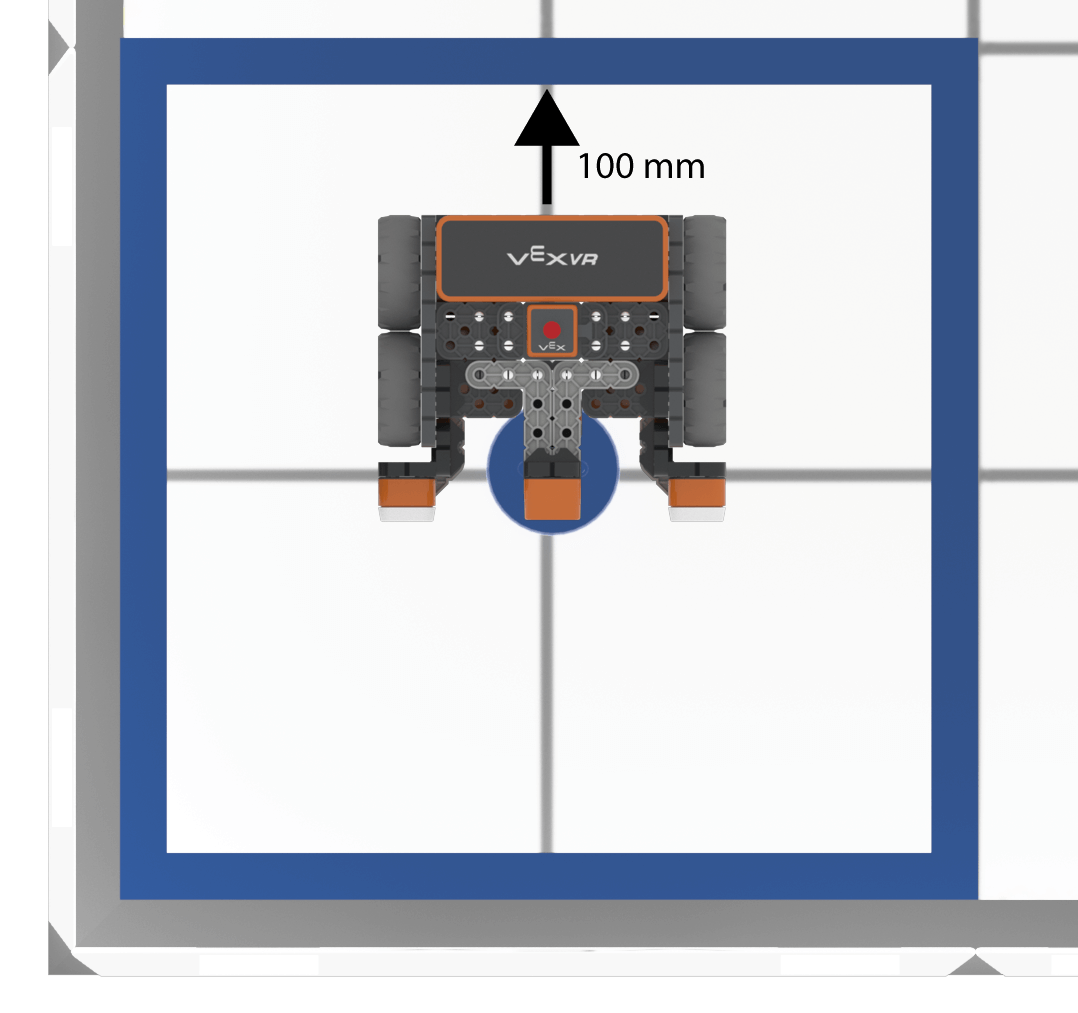
Để thu thập được đĩa màu tiếp theo, Robot VR sẽ cần phải quay và lái về phía mục tiêu có màu tiếp theo. Vận dụng những kiến thức đã học ở bài học trước, để tránh va chạm với đĩa trong mục tiêu, VR Robot bây giờ sẽ cần phải di chuyển ra khỏi đường đi của đĩa. Để làm được điều này, Robot VR sẽ phải đảo ngược 100 milimét (mm), hoặc một nửa chiều dài của ô lưới vuông trên Sân chơi.
-
Thêm lệnh drive_for bên dưới lệnh energize và đặt tham số thành “REVERSE” cho 100 milimét (mm), do đó phần chú thích thứ tư của dự án sẽ trông như thế này:
# 4. Thả đĩa vào mục tiêu magnet.energize(DROP) drivetrain.drive_for(REVERSE, 100, MM) - Bây giờ, VR Robot sẽ phải rẽ trái để hướng đến mục tiêu có màu tiếp theo.

-
Thêm lệnh turn_to_headingbên dưới bình luận thứ năm và đặt tham số thành 90 độ để Robot VR hướng về mục tiêu tiếp theo, do đó phần thứ năm của dự án trông như thế này:
# 5. Quay đầu và lái đến mục tiêu tiếp theo drivetrain.turn_to_heading(90, DEGREES) -
Tiếp theo, Robot VR sẽ phải di chuyển về phía trước để đến mục tiêu có màu tiếp theo. Lưu ý rằng Robot VR sẽ phải di chuyển về phía trước bốn ô lưới hoặc 800 milimét (mm) để di chuyển đến tâm của mục tiêu màu tiếp theo.

-
Thêm lệnh drive_forsau lệnh turn_to_heading và đặt tham số tiến về phía trước 800 milimét (mm), do đó phần thứ năm trông như thế này:
# 5. Quay đầu và lái đến mục tiêu tiếp theo drivetrain.turn_to_heading(90, DEGREES) drivetrain.drive_for(FORWARD, 800, MM) -
Bây giờ, VR Robot sẽ phải quay mặt về phía các đĩa màu.

-
Thêm một bình luận khác và lệnh turn_to_heading thứ hai vào cuối dự án và đặt tham số thành 0 độ. Thao tác này sẽ xoay Robot VR hướng về các đĩa màu. Hãy đảm bảo các lệnh được thụt lề đúng cách trong dự án của bạn.
# 6. Quay sang đĩa drivetrain.turn_to_heading(0, DEGREES) - Mở Disk Mover Playgroundnếu nó chưa mở và chạy dự án.
-
Robot VR sẽ nhặt và di chuyển đĩa màu xanh đầu tiên vào mục tiêu màu xanh, sau đó lái qua mục tiêu màu đỏ. Robot VR cũng sẽ quay mặt về phía các đĩa màu đỏ.

Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.