
Lezione 4: Costruire il progetto
Organizza il progetto e inizia
- Avviare un nuovo progetto di testo e selezionare il Disk Mover Playground quando richiesto.
-
Denominare il progetto Unit8Lesson4.

-
Utilizzando i comportamenti appena identificati, aggiungi i seguenti commenti per organizzare il progetto.
def main(): # 1. Drive to disk using Down Eye Sensor # 2. Prendi il disco # 3. Guida verso l'obiettivo utilizzando il sensore di distanza n. 4. Rilascia il disco nell'obiettivo n. 5. Gira e guida verso il prossimo obiettivo -
Costruisci il seguente codice che istruisce il robot VR a completare i primi quattro comportamenti sopra elencati. Questo progetto utilizzerà gli stessi comandi utilizzati nella lezione precedente per spostare i dischi utilizzando il feedback del sensore. Il tuo progetto dovrebbe essere simile a questo:
def main(): # 1. Drive to disk using Down Eye Sensor while not down_eye.near_object(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() # 2. Prendi il magnete del disco. Energizza (BOOST) # 3. Guidare verso l'obiettivo utilizzando il sensore di distanza drivetrain.turn_to_heading (180, GRADI) mentre front_distance.get_distance (MM) > 200 :drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain. stop() # 4. Drop disk in goal magnet.energize(DROP) # 5. Gira e guida verso il prossimo obiettivo - Aprire la finestra del parco giochi se non è già aperta. Assicurarsi che Disk Mover Playground si apra ed eseguire il progetto.
-
Quando questo progetto viene eseguito, il robot VR guiderà e raccoglierà il primo disco blu, si girerà, guiderà verso l'obiettivo blu e lascerà cadere il disco.

Gira e guida al prossimo set di dischi
-
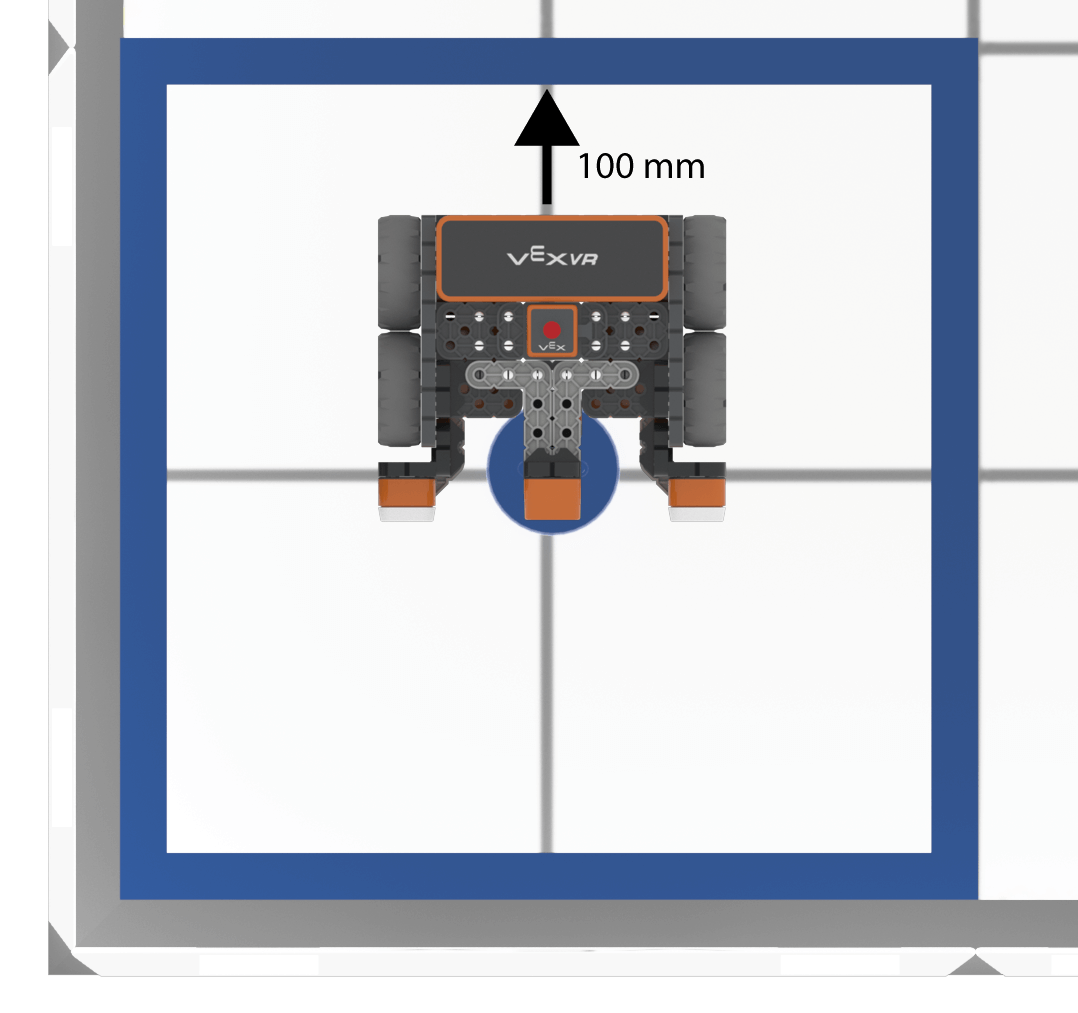
Per raccogliere il prossimo disco colorato, il robot VR dovrà girare e guidare verso il prossimo obiettivo colorato. Utilizzando ciò che abbiamo appreso nella lezione precedente, al fine di evitare la collisione con il disco nell'obiettivo, il robot VR dovrà ora spostarsi fuori dalla traiettoria del disco. Per fare ciò, il robot VR dovrà invertire 100 millimetri (mm), o metà della lunghezza di un quadrato della griglia sul parco giochi.
-
Aggiungere un comando drive_for sotto il comando energize e impostare il parametro su "REVERSE" per 100 millimetri (mm), in modo che la quarta sezione di commento del progetto appaia così:
# 4. Drop disk in goal magnet.energize(DROP) drivetrain.drive_for(REVERSE, 100, MM) - Il robot VR dovrà ora girare a sinistra per affrontare il prossimo obiettivo colorato.

-
Aggiungi un comando turn_to_heading sotto il quinto commento e imposta il parametro a 90 gradi affinché il robot VR sia rivolto verso l'obiettivo successivo, in modo che la quinta sezione del progetto appaia così:
# 5. Gira e guida verso il prossimo obiettivo drivetrain.turn_to_heading(90, GRADI) -
Successivamente, il robot VR dovrà avanzare verso il prossimo obiettivo colorato. Si noti che il robot VR dovrà avanzare di quattro quadrati della griglia o 800 millimetri (mm) per raggiungere il centro del prossimo obiettivo colorato.

-
Aggiungere un comando drive_for dopo il comando turn_to_heading e impostare il parametro su forward 800 millimetri (mm), in modo che la quinta sezione sia simile a questa:
# 5. Girare e guidare verso il prossimo obiettivodrivetrain.turn_to_heading (90, GRADI) drivetrain.drive_for(AVANTI, 800, MM) -
Il robot VR dovrà ora ruotare per affrontare i dischi colorati.

-
Aggiungere un altro commento e un secondo comando turn_to_heading alla fine del progetto e impostare il parametro su zero gradi. Questo ruoterà il robot VR verso i dischi colorati. Assicurarsi che i comandi siano rientrati correttamente all'interno del progetto.
# 6. Passare ai dischi drivetrain.turn_to_heading(0, GRADI) - Aprire il Disk Mover Playground se non è già aperto ed eseguire il progetto.
-
Il robot VR raccoglierà e sposterà il primo disco blu nell'obiettivo blu, quindi supererà l'obiettivo rosso. Il robot VR si girerà anche verso i dischi rossi.

Selezionare il pulsante Avanti per continuare con il resto della lezione.