
പാഠം 4: പ്രോജക്റ്റ് നിർമ്മിക്കുക
പ്രോജക്റ്റ് സംഘടിപ്പിച്ച് ആരംഭിക്കുക
- ഒരു പുതിയ ടെക്സ്റ്റ് പ്രോജക്റ്റ് ആരംഭിച്ച് ആവശ്യപ്പെടുമ്പോൾ ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് തിരഞ്ഞെടുക്കുക.
-
പ്രോജക്റ്റിന് എന്ന് പേര് നൽകുക യൂണിറ്റ്8ലെസൺ.

-
ഇപ്പോൾ തിരിച്ചറിഞ്ഞ സ്വഭാവരീതികൾ ഉപയോഗിച്ച്, പ്രോജക്റ്റ് സംഘടിപ്പിക്കുന്നതിന് ഇനിപ്പറയുന്ന അഭിപ്രായങ്ങൾ ചേർക്കുക.
ഡെഫ് മെയിൻ(): # 1. ഡൗൺ ഐ സെൻസർ # 2 ഉപയോഗിച്ച് ഡിസ്കിലേക്ക് ഡ്രൈവ് ചെയ്യുക. ഡിസ്ക് #3 എടുക്കുക. ഡിസ്റ്റൻസ് സെൻസർ #4 ഉപയോഗിച്ച് ലക്ഷ്യത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക. ഗോൾ # 5 ൽ ഡിസ്ക് ഇടുക. തിരിഞ്ഞ് അടുത്ത ലക്ഷ്യത്തിലേക്ക് പോകുക -
മുകളിൽ ലിസ്റ്റുചെയ്തിരിക്കുന്ന ആദ്യത്തെ നാല് പെരുമാറ്റങ്ങൾ പൂർത്തിയാക്കാൻ VR റോബോട്ടിനോട് നിർദ്ദേശിക്കുന്ന ഇനിപ്പറയുന്ന കോഡ് നിർമ്മിക്കുക. സെൻസർ ഫീഡ്ബാക്ക് ഉപയോഗിച്ച് ഡിസ്കുകൾ നീക്കാൻ മുൻ പാഠത്തിൽ ഉപയോഗിച്ച അതേ കമാൻഡുകൾ തന്നെയാണ് ഈ പ്രോജക്റ്റിലും ഉപയോഗിക്കുന്നത്. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ ആയിരിക്കണം:
ഡെഫ് മെയിൻ(): # 1. down_eye.near_object(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() # 2 അല്ല, Down Eye Sensor ഉപയോഗിച്ച് ഡിസ്കിലേക്ക് ഡ്രൈവ് ചെയ്യുക. ഡിസ്ക് എടുക്കുക മാഗ്നെറ്റ്.എനർജിസ്(ബൂസ്റ്റ്) # 3. ഡിസ്റ്റൻസ് സെൻസർ ഡ്രൈവ്ട്രെയിൻ.turn_to_heading(180, DEGREES) ഉപയോഗിച്ച് ലക്ഷ്യത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക, അതേസമയം front_distance.get_distance(MM) > 200: ഡ്രൈവ്ട്രെയിൻ.drive(FORWARD) wait(5, MSEC) ഡ്രൈവ്ട്രെയിൻ. നിർത്തുക() # 4. ഗോൾ മാഗ്നെറ്റിൽ ഡിസ്ക് ഡ്രോപ്പ് ചെയ്യുക. എനർജിസ് ചെയ്യുക (ഡ്രോപ്പ് ചെയ്യുക) # 5. തിരിഞ്ഞ് അടുത്ത ലക്ഷ്യത്തിലേക്ക് പോകുക - പ്ലേഗ്രൗണ്ട് വിൻഡോ തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറക്കുക. ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്തുറക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക, തുടർന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
ഈ പ്രോജക്റ്റ് റൺ ചെയ്തുകഴിഞ്ഞാൽ, വിആർ റോബോട്ട് ഡ്രൈവ് ചെയ്ത് ആദ്യത്തെ നീല ഡിസ്ക് എടുക്കും, തിരിഞ്ഞ്, നീല ലക്ഷ്യത്തിലേക്ക് ഡ്രൈവ് ചെയ്ത് ഡിസ്ക് ഇടും.

തിരിഞ്ഞ് അടുത്ത ഡിസ്ക് സെറ്റിലേക്ക് ഡ്രൈവ് ചെയ്യുക
-
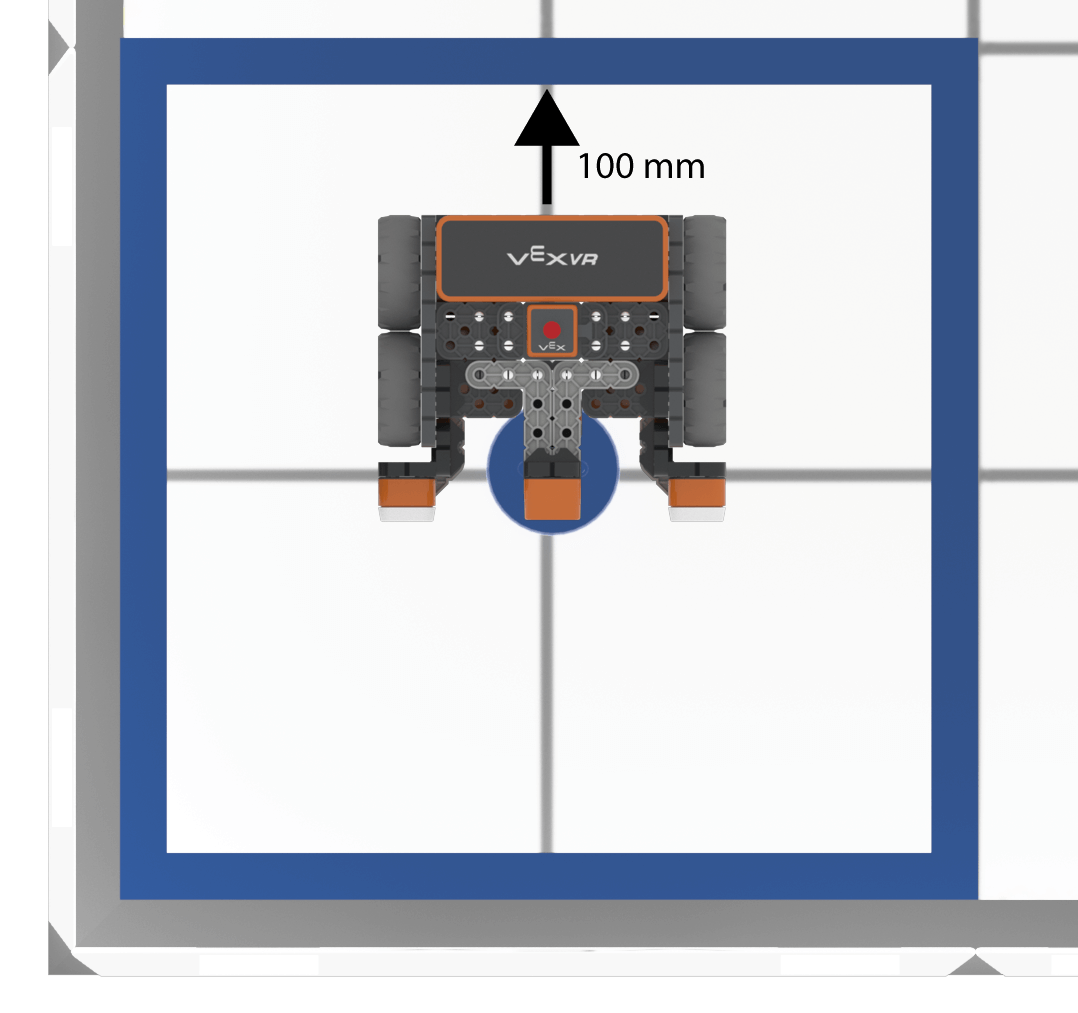
അടുത്ത നിറമുള്ള ഡിസ്ക് ശേഖരിക്കാൻ, വിആർ റോബോട്ട് തിരിഞ്ഞ് അടുത്ത നിറമുള്ള ലക്ഷ്യത്തിലേക്ക് ഓടേണ്ടതുണ്ട്. മുൻ പാഠത്തിൽ നമ്മൾ പഠിച്ചത് ഉപയോഗിച്ച്, ലക്ഷ്യത്തിലെ ഡിസ്കുമായി കൂട്ടിയിടിക്കുന്നത് തടയാൻ, VR റോബോട്ട് ഇപ്പോൾ ഡിസ്കിന്റെ വഴിയിൽ നിന്ന് മാറേണ്ടതുണ്ട്. ഇത് ചെയ്യുന്നതിന്, വിആർ റോബോട്ട് പ്ലേഗ്രൗണ്ടിലെ ഒരു ഗ്രിഡ് സ്ക്വയറിന്റെ പകുതി നീളം അല്ലെങ്കിൽ 100 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) പിന്നിലേക്ക് മാറ്റേണ്ടതുണ്ട്.
-
energize കമാൻഡിന് താഴെയായി ഒരു drive_for കമാൻഡ് ചേർക്കുക, തുടർന്ന് 100 മില്ലിമീറ്ററിന് (mm) “REVERSE” എന്ന പാരാമീറ്റർ സജ്ജമാക്കുക, അങ്ങനെ പ്രോജക്റ്റിന്റെ നാലാമത്തെ കമന്റ് വിഭാഗം ഇതുപോലെ കാണപ്പെടുന്നു:
# 4. ലക്ഷ്യത്തിൽ ഡിസ്ക് ഡ്രോപ്പ് ചെയ്യുക മാഗ്നെറ്റ്.എനർജിസ്(ഡ്രോപ്പ്) ഡ്രൈവ്ട്രെയിൻ.ഡ്രൈവ്_ഫോർ(റിവേഴ്സ്, 100, എംഎം) - അടുത്ത നിറമുള്ള ലക്ഷ്യത്തെ നേരിടാൻ വിആർ റോബോട്ട് ഇനി ഇടത്തേക്ക് തിരിയേണ്ടതുണ്ട്.

-
അഞ്ചാമത്തെ കമന്റിന് താഴെ ഒരു turn_to_headingകമാൻഡ് ചേർത്ത്, VR റോബോട്ടിന് അടുത്ത ലക്ഷ്യം കൈവരിക്കുന്നതിന് പാരാമീറ്റർ 90 ഡിഗ്രിയിലേക്ക് സജ്ജമാക്കുക, അങ്ങനെ പ്രോജക്റ്റിന്റെ അഞ്ചാമത്തെ വിഭാഗം ഇതുപോലെ കാണപ്പെടുന്നു:
# 5. തിരിഞ്ഞ് അടുത്ത ലക്ഷ്യത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക drivetrain.turn_to_heading(90, DEGREES) -
അടുത്തതായി, വിആർ റോബോട്ട് അടുത്ത നിറമുള്ള ലക്ഷ്യത്തിലേക്ക് മുന്നോട്ട് പോകേണ്ടതുണ്ട്. അടുത്ത നിറമുള്ള ഗോളിന്റെ മധ്യഭാഗത്തേക്ക് പോകുന്നതിന് VR റോബോട്ട് നാല് ഗ്രിഡ് സ്ക്വയറുകൾ അല്ലെങ്കിൽ 800 മില്ലിമീറ്റർ (മില്ലീമീറ്റർ) മുന്നോട്ട് ഓടിക്കേണ്ടിവരുമെന്ന് ശ്രദ്ധിക്കുക.

-
turn_to_heading കമാൻഡിന് ശേഷം ഒരു drive_forകമാൻഡ് ചേർത്ത് പാരാമീറ്റർ ഫോർവേഡ് 800 മില്ലിമീറ്റർ (mm) ആയി സജ്ജമാക്കുക, അങ്ങനെ അഞ്ചാമത്തെ വിഭാഗം ഇതുപോലെ കാണപ്പെടും:
# 5. തിരിഞ്ഞ് അടുത്ത ലക്ഷ്യത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക drivetrain.turn_to_heading(90, DEGREES) drivetrain.drive_for(FORWARD, 800, MM) -
ഇനി VR റോബോട്ട് നിറമുള്ള ഡിസ്കുകൾക്ക് അഭിമുഖമായി തിരിയേണ്ടതുണ്ട്.

-
പ്രോജക്റ്റിന്റെ അവസാനം മറ്റൊരു കമന്റും രണ്ടാമത്തെ turn_to_heading കമാൻഡും ചേർത്ത് പാരാമീറ്റർ പൂജ്യം ഡിഗ്രിയിലേക്ക് സജ്ജമാക്കുക. ഇത് VR റോബോട്ടിനെ നിറമുള്ള ഡിസ്കുകൾക്ക് അഭിമുഖമായി തിരിക്കും. നിങ്ങളുടെ പ്രോജക്റ്റിനുള്ളിൽ കമാൻഡുകൾ ശരിയായി ഇൻഡന്റ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
# 6. ഡിസ്കുകളിലേക്ക് തിരിയുക ഡ്രൈവ്ട്രെയിൻ.turn_to_heading(0, DEGREES) - ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
വിആർ റോബോട്ട് ആദ്യത്തെ നീല ഡിസ്ക് എടുത്ത് നീല ഗോളിലേക്ക് നീക്കും, തുടർന്ന് ചുവന്ന ഗോളിന് മുകളിലൂടെ ഓടിച്ചു പോകും. വിആർ റോബോട്ടും ചുവന്ന ഡിസ്കുകൾക്ക് അഭിമുഖമായി തിരിക്കും.

ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.