
บทเรียนที่ 4: สร้างโครงการ
จัดระเบียบโครงการและเริ่มต้น
- เริ่มโครงการข้อความใหม่และเลือก Disk Mover Playground เมื่อได้รับแจ้ง

-
ตั้งชื่อ โครงการUnit8Lesson4

-
เพิ่มความคิดเห็นต่อไปนี้เพื่อจัดระเบียบโครงการโดยใช้พฤติกรรมที่เพิ่งระบุ
def main (): #1. ขับไปยังดิสก์โดยใช้เซ็นเซอร์ดวงตาลง #2 รับดิสก์ #3 ขับไปยังเป้าหมายโดยใช้เซ็นเซอร์ระยะทาง #4 วางดิสก์ในเป้าหมาย #5 เลี้ยวและขับไปยังเป้าหมายถัดไป -
สร้างโค้ดต่อไปนี้ที่สั่งให้หุ่นยนต์ VR ทำสี่พฤติกรรมแรกที่ระบุไว้ข้างต้นให้เสร็จสมบูรณ์ โปรเจกต์นี้จะใช้คำสั่งเดียวกับที่ใช้ในบทเรียนก่อนหน้านี้เพื่อย้ายดิสก์โดยใช้ข้อเสนอแนะจากเซ็นเซอร์ โปรเจกต์ของคุณควรมีลักษณะดังนี้:
def main (): #1. ขับไปยังดิสก์โดยใช้ Down Eye Sensor ในขณะที่ไม่ ใช่ down_eye.near_object (): drivetrain.drive (FORWARD) wait (5 , msec) drivetrain.stop () #2 เลือกดิสก์ magnet.energize (BOOST) #3 ขับไปยังเป้าหมายโดยใช้เซ็น เซอร์ระยะทาง drivetrain.turn_to_heading (180, องศา) ในขณะที่ front_distance.get_distance (MM) > 200 : drivetrain.drive (ไปข้างหน้า) รอ (5, มิลลิวินาที ) drivetrain stop () #4. ดรอปดิสก์ในแม่เหล็ก เป้าหมายให้พลังงาน (ดรอป) #5 เลี้ยวและขับไปยังเป้าหมายถัดไป - เปิดหน้าต่างสนามเด็กเล่นหากยังไม่ได้เปิด ตรวจสอบให้แน่ใจว่า Disk Mover Playground เปิดขึ้นและดำเนินโครงการ
-
เมื่อโครงการนี้ทำงานหุ่นยนต์ VR จะขับเคลื่อนและหยิบดิสก์สีน้ำเงินตัวแรกหมุนกลับขับไปที่เป้าหมายสีน้ำเงินและวางดิสก์

หมุนและขับไปยังดิสก์ชุดถัดไป
-
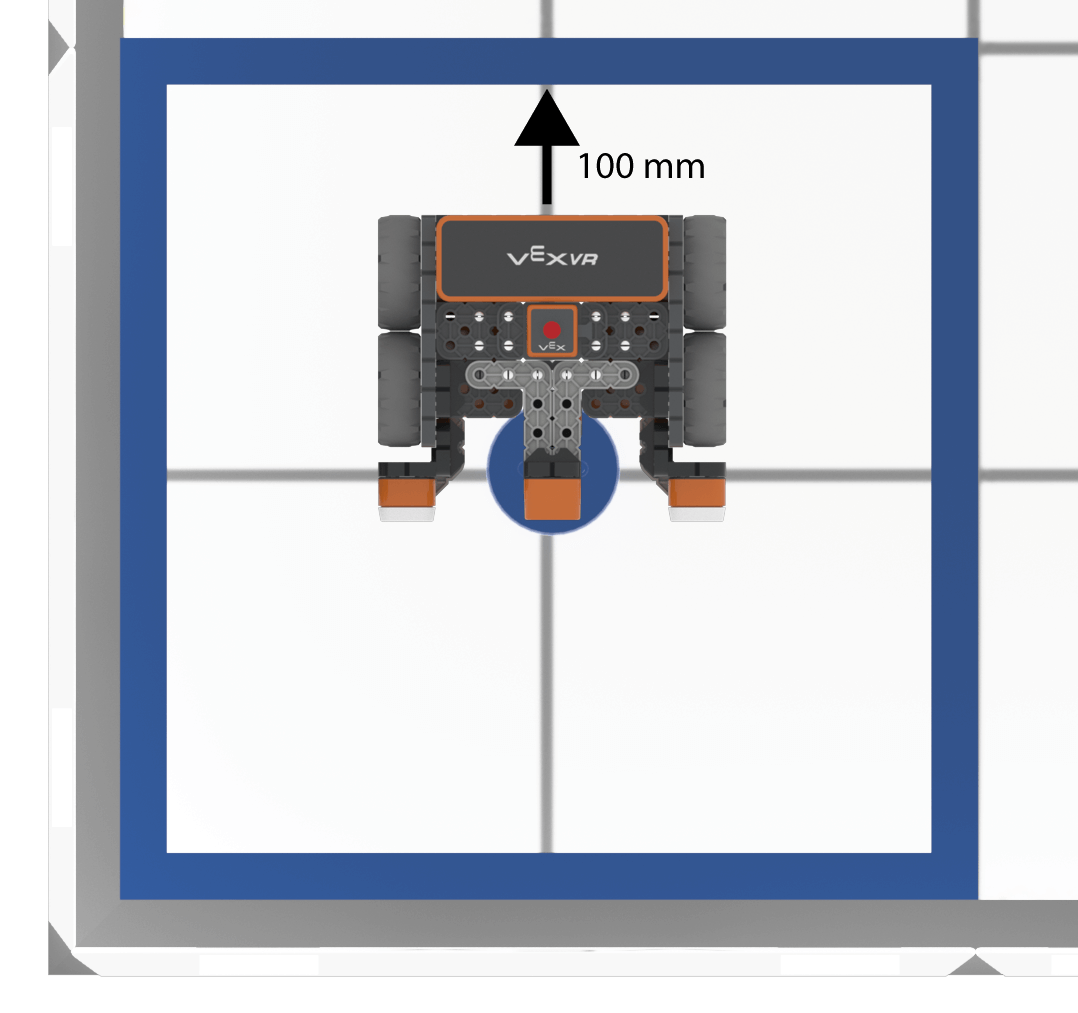
ในการรวบรวมดิสก์สีถัดไปหุ่นยนต์ VR จะต้องเลี้ยวและขับไปยังเป้าหมายสีถัดไป การใช้สิ่งที่เราได้เรียนรู้ในบทเรียนก่อนหน้านี้เพื่อป้องกันการชนกับดิสก์ในเป้าหมายตอนนี้หุ่นยนต์ VR จะต้องย้ายออกจากทางของดิสก์ ในการทำเช่นนี้หุ่นยนต์ VR จะต้องย้อนกลับ 100 มิลลิเมตร (มม.) หรือครึ่งหนึ่งของความยาวของตารางสี่เหลี่ยมบนสนามเด็กเล่น
-
เพิ่มคำสั่ง drive_for ใต้คำสั่ง energize และตั้งค่าพารามิเตอร์เป็น “REVERSE” เป็นระยะทาง 100 มิลลิเมตร (มม.) ดังนั้นส่วนความคิดเห็นที่สี่ของโปรเจ็กต์จะมีลักษณะดังนี้:
#4. Drop disk in goal magnet.energize (DROP) drivetrain.drive_for (REVERSE, 100, MM) - ตอนนี้หุ่นยนต์ VR จะต้องเลี้ยวซ้ายเพื่อไปยังเป้าหมายสีถัดไป

-
เพิ่มคำสั่ง turn_to_heading ใต้ความคิดเห็นที่ห้า และตั้งค่าพารามิเตอร์เป็น 90 องศาเพื่อให้ VR Robot หันหน้าไปยังเป้าหมายถัดไป ดังนั้นส่วนที่ห้าของโปรเจกต์จะมีลักษณะดังนี้:
#5. เลี้ยวและขับไปยังเป้าหมายถัด ไป drivetrain.turn_to_heading (90, DEGREES) -
ถัดไปหุ่นยนต์ VR จะต้องขับเคลื่อนไปข้างหน้าเพื่อไปยังเป้าหมายสีถัดไป โปรดทราบว่าหุ่นยนต์ VR จะต้องขับไปข้างหน้าสี่สี่เหลี่ยมตารางหรือ 800 มิลลิเมตร (มม.) เพื่อขับไปยังศูนย์กลางของเป้าหมายสีถัดไป

-
เพิ่มคำสั่ง drive_for หลังจาก คำสั่ง turn_to_heading และ ตั้งค่าพารามิเตอร์ให้ส่งต่อ 800 มิลลิเมตร (มม.) ดังนั้นส่วนที่ห้าจึงมีลักษณะดังนี้:
#5. เลี้ยวและขับไปยังเป้าหมายถัด ไป drivetrain.turn_to_heading (90, DEGREES ) drivetrain.drive_for (FORWARD, 800, MM) -
ตอนนี้หุ่นยนต์ VR จะต้องหันไปเผชิญหน้ากับดิสก์สี

-
เพิ่มความคิดเห็นอีกอันและคำสั่ง ต่อวินาที turn_to_heading ไปที่ส่วนท้ายของโครงการ และตั้งค่าพารามิเตอร์เป็นศูนย์องศา การดำเนินการนี้จะเปลี่ยนหุ่นยนต์ VR ให้หันหน้าไปทางดิสก์สี ตรวจสอบให้แน่ใจว่าคำสั่งถูกเยื้องอย่างถูกต้องภายในโปรเจกต์ของคุณ
#6. หันไปที่ ดิสก์ drivetrain.turn_to_heading (0, องศา) - เปิด Disk Mover Playground หากยังไม่ได้เปิดและเรียกใช้โครงการ
-
หุ่นยนต์ VR จะหยิบและย้ายดิสก์สีน้ำเงินอันแรกไปยังเป้าหมายสีน้ำเงินจากนั้นขับข้ามเป้าหมายสีแดง หุ่นยนต์ VR จะหันหน้าไปทางดิสก์สีแดงด้วย

เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป