
Leçon 4 : Construire le projet
Organisez le projet et lancez-vous
- Démarrez un nouveau projet de texte et sélectionnez le Disk Mover Playground lorsque vous y êtes invité.

-
Nommez le projet Unit8Lesson4.

-
En utilisant les comportements qui viennent d'être identifiés, ajoutez les commentaires suivants pour organiser le projet.
def main() : # 1. Lancez le disque à l'aide du capteur Down Eye n ° 2. Prenez le disque n ° 3. Conduisez jusqu'au but à l'aide du capteur de distance n ° 4. Déposez le disque dans l'objectif n ° 5. Tournez et conduisez jusqu'au prochain objectif -
Créez le code suivant qui indique au robot VR de suivre les quatre premiers comportements énumérés ci-dessus. Ce projet utilisera les mêmes commandes que celles utilisées dans la leçon précédente pour déplacer les disques à l'aide des commentaires du capteur. Votre projet doit ressembler à ceci :
def main() : # 1. Drive to disk using Down Eye Sensor while not down_eye.near_object() : drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() # 2. Ramassez l'aimant à disque. Énergisez (BOOST) # 3. Conduisez jusqu'au but à l'aide du capteur de distance drivetrain.turn_to_heading (180, DEGRÉS) tandis que front_distance.get_distance (MM) > 200 : DRIVETRAIN.DRIVE (FORWARD) wait(5, MSEC) drivetrain. stop() # 4. Déposez le disque dans l' objectifmagnet.energize (DROP) # 5. Tournez et conduisez jusqu'au prochain objectif - Ouvrez la fenêtre Playground si elle n'est pas déjà ouverte. Assurez-vous que le Disk Mover Playground s'ouvre et exécutez le projet.
-
Lorsque ce projet est exécuté, le robot VR va conduire et ramasser le premier disque bleu, faire demi-tour, conduire à l'objectif bleu et laisser tomber le disque.

Tournez et entraînez jusqu'au prochain jeu de disques
-
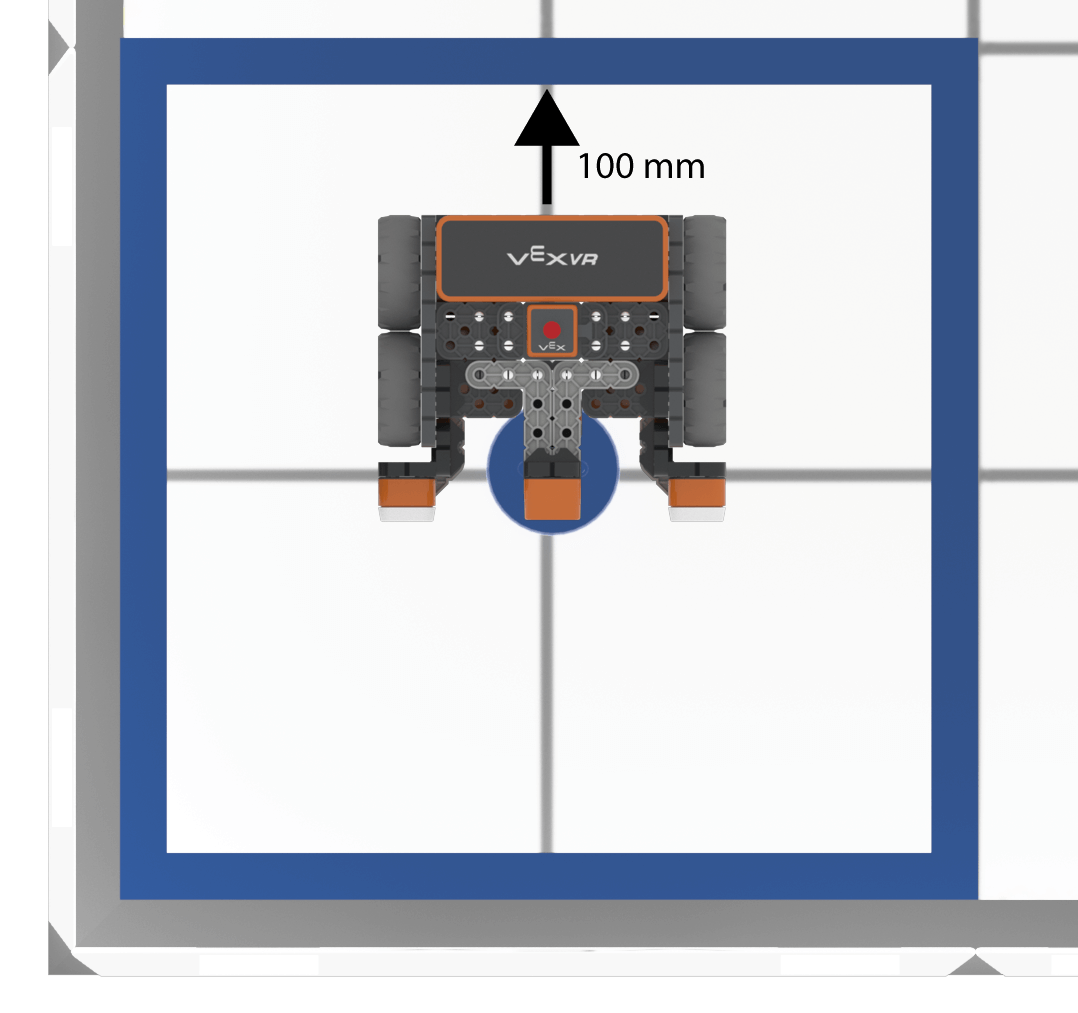
Afin de collecter le prochain disque coloré, le robot VR devra tourner et se diriger vers le prochain objectif coloré. En utilisant ce que nous avons appris dans la leçon précédente, afin d'éviter une collision avec le disque dans l'objectif, le robot VR devra maintenant se déplacer hors du chemin du disque. Pour ce faire, le robot VR devra inverser 100 millimètres (mm), soit la moitié de la longueur d'un carré de grille sur le terrain de jeu.
-
Ajoutez une commande drive_for sous la commande energize et définissez le paramètre sur « REVERSE » pour 100 millimètres (mm), de sorte que la quatrième section de commentaires du projet ressemble à ceci :
# 4. Collectez disque dans l' objectifmagnet.energize (DROP) drivetrain.drive_for(REVERSE, 100, MM) - Le robot VR devra maintenant tourner à gauche pour faire face au prochain objectif coloré.

-
Ajoutez une commande turn_to_heading sous le cinquième commentaire et définissez le paramètre à 90 degrés pour que le robot VR fasse face à l'objectif suivant, de sorte que la cinquième section du projet ressemble à ceci :
# 5. Tournez et conduisez jusqu'au prochain objectif drivetrain.turn_to_heading(90, DEGRÉS) -
Ensuite, le robot VR devra avancer vers le prochain objectif coloré. Notez que le robot VR devra faire avancer quatre carrés de grille, soit 800 millimètres (mm) afin de se rendre au centre du prochain objectif coloré.

-
Ajoutez une commande drive_for après la commande turn_to_heading et définissez le paramètre sur forward 800 millimeters (mm), de sorte que la cinquième section ressemble à ceci :
# 5. Tournez et conduisez jusqu'au prochain objectifdrivetrain.turn_to_heading (90, DEGRÉS) drivetrain.drive_for(AVANT, 800, MM) -
Le robot VR devra maintenant tourner pour faire face aux disques colorés.

-
Ajoutez un autre commentaire et une seconde commande turn_to_heading à la fin du projet et définissez le paramètre à zéro degré. Cela fera tourner le robot VR pour faire face aux disques colorés. Assurez-vous que les commandes sont correctement indentées dans votre projet.
# 6. Tourner vers les disques drivetrain.turn_to_heading(0, DEGRÉS) - Ouvrez le Disk Mover Playground s'il n'est pas déjà ouvert et exécutez le projet.
-
Le robot VR va ramasser et déplacer le premier disque bleu dans le but bleu, puis rouler sur le but rouge. Le robot VR se tournera également pour faire face aux disques rouges.

Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.