
Bermain
Bagian 1 - Langkah demi Langkah
- InstruksikanInstruksikan siswa bahwa mereka akan membangun apa yang mereka pelajari di Lab 1 untuk meminta Basis Kode mengumpulkan dan mengembalikan sampel batuan Mars (Cakram Merah). Namun sekarang, mereka akan mengkode robot mereka untuk menggunakan data Sensor Mata untuk mengurutkan Disk, berdasarkan warnanya.
- Tunjukkan kepada siswa pengaturan Lapangan dengan area penyortiran yang ditandai dengan X. Setelah Basis Kode mengumpulkan Cakram Merah, ia perlu menjatuhkannya di kotak yang bertanda X.
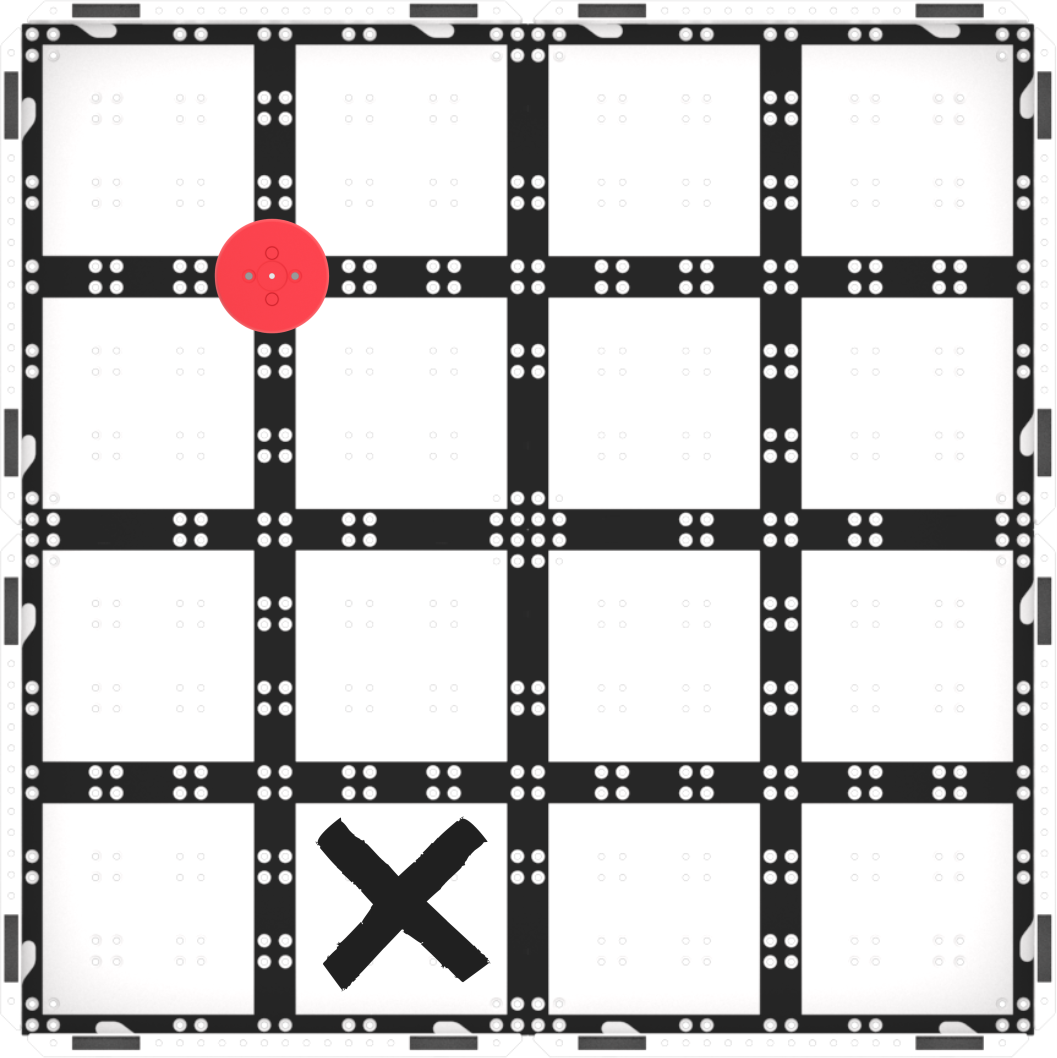
Pengaturan Lapangan - Siswa akan membangun proyek bersama Anda lalu mengujinya di permukaan Mars (Lapangan). Animasi di bawah menunjukkan bagaimana Basis Kode akan bergerak saat proyek ini dimulai. Robot tersebut mula-mula bergerak maju hingga mencapai Cakram Merah dan kemudian menggerakkan elektromagnetnya untuk mengambilnya. Selanjutnya, robot berbalik dan melaju kembali ke posisi awal, sebelum berbelok 90 derajat ke kiri dan melaju ke depan untuk mencapai area sortir yang ditandai dengan X. Setelah mencapai X, robot menjatuhkan Disk lalu berbalik dan melaju kembali ke posisi awal.
Berkas video - ModelModel bagi siswa tentang cara membangun proyek di VEXcode GO dan menguji proyek mereka di Lapangan.
- Mulailah dengan menunjukkan kepada siswa cara menghubungkan Otak pada Basis Kode mereka ke perangkat mereka di VEXcode GO. Karena langkah-langkah koneksi bervariasi antara perangkat, lihat artikel Menghubungkan di VEXcode GO VEX Library untuk langkah-langkah spesifik untuk menghubungkan VEX GO Brain ke komputer atau tablet Anda.
- Mereka juga perlu mengonfigurasi VEXCode GO untuk Basis Kode. Jika perlu, modelkan langkah-langkah dari artikel Konfigurasi Pustaka VEX Basis Kode dan pastikan siswa dapat melihat blok Drivetrain di Kotak Alat.
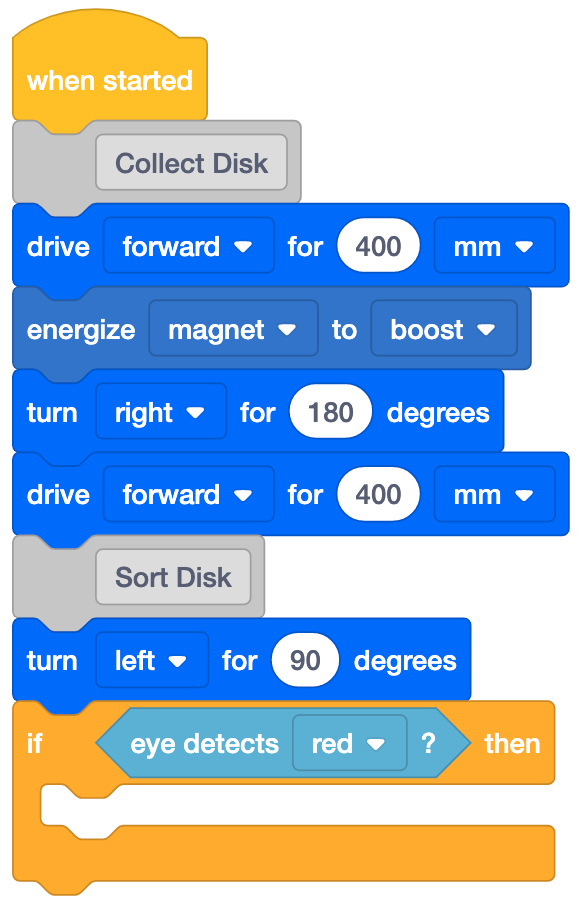
- Setelah Basis Kode dikonfigurasi, mintalah siswa menambahkan blok [Komentar] berikut untuk merencanakan dan mengatur proyek mereka. Blok di bawah blok “Kumpulkan Disk” [Komentar] akan menggerakkan Basis Kode untuk mengumpulkan Disk dan kembali ke Pangkalan Mars. Blok di bawah blok “Sort Disk” [Komentar] akan membuat Basis Kode menggunakan data Sensor Mata untuk mengirimkan Disk ke area penyortiran yang ditentukan —berdasarkan warna Disk.
Rencanakan proyek dengan blok [Komentar] - Kemudian, mintalah siswa untuk menambahkan blok berikut di bawah blok “Kumpulkan Disk” [Komentar] agar drive Basis Kode dapat mengumpulkan Disk Merah.

Kumpulkan kode Disk - Berikutnya, tambahkan ke proyek bersama-sama agar Basis Kode mengurutkan Disk. Seret blok [Putar untuk] ke ruang kerja dan tempelkan di bawah blok “Urutkan Disk” [Komentar]. Ubah parameter ke 'kiri' agar Basis Kode berputar ke arah area penyortiran.

Tambahkan [Putar ke] dan atur ke kiri - Tambahkan blok [If then], dan letakkan blok <Detects color> di dalam segi enam. Biarkan blok <Detects color> diatur ke merah. Ini akan membuat Basis Kode menggunakan Sensor Mata untuk mendeteksi warna Disk. Jika Disk ini berwarna merah, blok <Detects color> akan melaporkan benar, dan blok yang ditambahkan ke dalam blok 'C' akan berjalan.
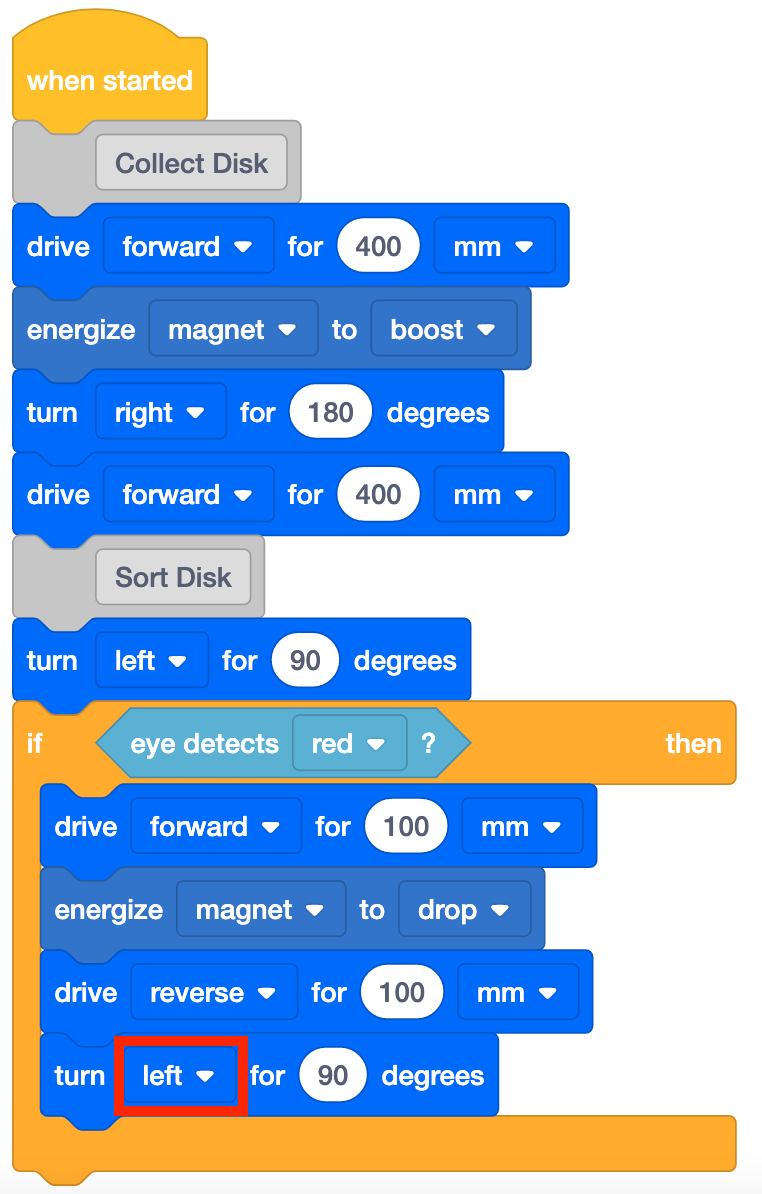
Tambahkan [Jika maka] dengan <Detects color> - Tambahkan [Drive for] dan [Energize electromagnet] di dalam blok [If then] dan atur [Energize electromagnet] ke 'drop.' Ini akan mengarahkan drive Basis Kode ke area penyortiran dan melepas Disk.

Tambahkan [Drive for} dan [Energize electromagnet] yang diatur ke 'drop' - Tambahkan blok [Drive for] dan atur ke posisi terbalik. Ini akan membuat Basis Kode kembali ke Pangkalan Mars setelah menjatuhkan Disk.

Tambahkan [Drive for] dan atur untuk membalikkan - Terakhir, tambahkan blok [Putar ke], dan atur ke 'kiri' agar Basis Kode kembali ke posisi awal —menghadap area pengumpulan permukaan Mars.
Tambahkan [Drive for] dan atur untuk membalikkan - Minta siswa memberi nama proyek mereka sebagai Sort Red 1 dan simpan ke perangkat mereka. Lihat bagian Buka dan Simpan pada Pustaka VEXcode GO VEX untuk langkah-langkah khusus perangkat guna menyimpan proyek VEXcode GO.
Model bagi siswa bagaimana menguji proyek mereka di Lapangan.
- Pertama, tunjukkan kepada mereka cara menempatkan robot mereka di titik awal (Pangkalan Mars) dan Cakram Merah di Lapangan seperti yang ditunjukkan pada gambar di bawah. Gunakan garis kisi pada Lapangan untuk membantu penyelarasan. Cakram dan Elektromagnet keduanya dapat disejajarkan pada garis kisi Lapangan yang berpotongan, untuk memudahkan siswa mempersiapkan diri agar berhasil saat menguji proyek mereka.

Pengaturan untuk Menguji - Setelah Basis Kode tersedia, pilih 'Mulai' di VEXcode GO untuk menguji proyek. Saksikan saat Pangkalan Kode melaju untuk mengambil Cakram Merah, kembali ke pangkalan, lalu mengantarkannya ke area penyortiran.
Pilih 'Mulai' untuk menguji proyek - Siswa perlu memilih tombol 'Stop' di Toolbar VEXcode GO untuk menghentikan proyek.
- Bagi siswa yang selesai lebih awal dan membutuhkan tantangan tambahan, mintalah mereka memindahkan Cakram Merah ke lokasi lain. Bisakah mereka menyesuaikan kodenya agar Basis Kode mengumpulkan Disk dan mengirimkannya ke area penyortiran yang sama?
- MemfasilitasiMemfasilitasi percakapan dengan siswa saat mereka menguji proyek mereka.
- Bagaimana Basis Kode mengetahui kapan harus memberi energi pada Elektromagnet?
- Blok apa yang digunakan agar Basis Kode mendeteksi warna Disk?
- Apa yang akan terjadi jika Basis Kode tidak mendeteksi warna merah?
Berfokuslah pada konsep, bukan pada ketepatan. Tujuan dari Lab ini adalah untuk fokus pada konsep penggunaan Elektromagnet dalam suatu proyek. Jika siswa sedikit menggeser robotnya, atau Cakram tidak berada pada tempat yang tepat saat mereka melaju ke arahnya, beri tahu mereka bahwa boleh saja menggerakkan Cakram sedikit untuk memastikannya tertangkap oleh Elektromagnet.
- IngatkanIngatkan siswa untuk memeriksa parameter di blok [Drive for] untuk memastikan proyek memiliki jarak yang benar yang diperlukan untuk mengumpulkan lalu mengurutkan Disk.
- Mereka juga harus memeriksa apakah parameter di blok [Putar ke] diatur agar Basis Kode berputar ke arah yang benar untuk kembali ke Pangkalan Mars dan menuju area penyortiran.
Untuk mendorong pola pikir berkembang dan membantu siswa menerima proses coba-coba yang merupakan bagian dari pengkodean serta belajar dari kesalahan yang terjadi, ajukan pertanyaan seperti:
- Kesalahan apa yang pernah Anda buat yang mengajarkan Anda sesuatu?
- Bagian Lab manakah yang sulit, atau membuat Anda berpikir keras?
- TanyakanTanyakan kepada siswa bagaimana Perseverance Rover dapat menggunakan Sensor Mata untuk mengumpulkan informasi dan mempelajari berbagai sampel batuan dan tanah Mars. Apa yang dapat dipelajari Perseverance Rover dengan Eye Sensor?
Istirahat Tengah Bermain & Diskusi Kelompok
Segera setelah setiap kelompok menguji proyek mereka agar Basis Kode mengumpulkan dan mengirimkan Cakram Merah ke area penyortiran, berkumpullah untuk percakapan singkat.
Periksa kemajuan siswa dan bicarakan tentang apa yang dilakukan Basis Kode dalam proyek mereka.
- Bagaimana cara kerja Sensor Mata dalam proyek kami? Blok apa saja yang mengendalikan Sensor Mata?
- Bagaimana Anda membuat Elektromagnet bekerja dengan Sensor Mata dalam proyek Anda?
- Bagaimana jika kita mengubah lokasi Disk? Apakah proyek ini masih akan berjalan? Mengapa atau mengapa tidak? Parameter apa yang akan Anda ubah?
Bagian 2 - Langkah demi Langkah
- InstruksikanInstruksikan siswa bahwa mereka akan menerapkan apa yang telah mereka pelajari di Bagian Permainan 1 untuk mengulangi proyek mereka guna membuat Basis Kode mengumpulkan Cakram Merah dari lokasi baru dan menjatuhkannya di area penyortiran baru. Mereka perlu mengubah parameter dalam proyek mereka agar Basis Kode dapat mengumpulkan dan mengurutkan Disk dengan sukses.
- Tunjukkan kepada siswa pengaturan Lapangan yang baru dan berikan jarak tempuh sehingga mereka dapat fokus pada kode untuk proyek ini. Basis Kode perlu melaju sejauh 200 milimeter (~8 inci) untuk mengumpulkan Disk, dan 350 milimeter (mm) (~14 inci (in)) ke area penyortiran baru.
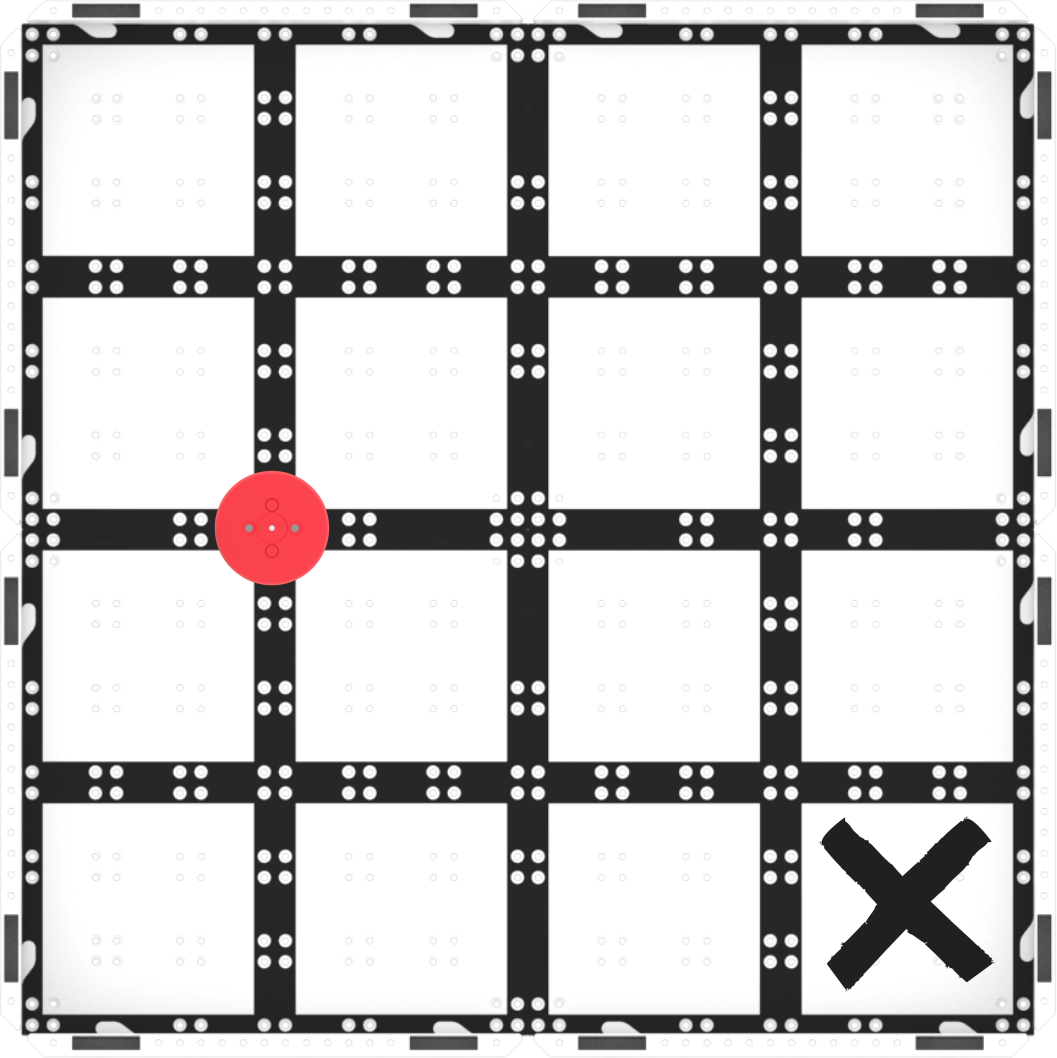
Mainkan Bagian 2 Pengaturan Lapangan - Animasi berikut menunjukkan satu kemungkinan cara agar Basis Kode dapat bergerak untuk menyelesaikan tantangan. Robot tersebut mula-mula bergerak maju hingga mencapai Cakram Merah dan kemudian menggerakkan elektromagnetnya untuk mengambilnya. Selanjutnya, robot berbalik dan melaju kembali ke posisi awal, sebelum berbelok 90 derajat ke kiri dan melaju ke depan untuk mencapai area sortir yang ditandai dengan X. Setelah mencapai X, robot menjatuhkan Disk lalu berbalik dan melaju kembali ke posisi awal.
Berkas video - ModelModel bagi siswa cara memulai proyek mereka di VEXcode GO.
- Bila perlu, tunjukkan kepada siswa cara menghubungkan Brain pada Basis Kode mereka ke perangkat mereka di VEXcode GO. Karena langkah-langkah koneksi bervariasi antara perangkat, lihat artikel Menghubungkan di VEXcode GO VEX Library untuk langkah-langkah spesifik untuk menghubungkan VEX GO Brain ke komputer atau tablet Anda.
- Jika perlu, modelkan langkah-langkah dari artikel Konfigurasi Pustaka VEX Basis Kode dan pastikan siswa dapat melihat blok Drivetrain di Kotak Alat.
- Minta siswa memberi nama proyek mereka sebagai Sort Red 2 dan simpan ke perangkat mereka. Lihat bagian Buka dan Simpan dari Pustaka VEXcode GO VEX untuk langkah-langkah khusus perangkat untuk menyimpan proyek VEXcode GO.
Bila perlu, berikan contoh kepada siswa cara menguji proyek mereka di Lapangan.
- Tunjukkan pada mereka cara menyiapkan pengujian dengan menempatkan Basis Kode di Pangkalan Mars.

Disiapkan untuk menguji - Setelah Basis Kode tersedia, pilih 'Mulai' di VEXcode GO untuk menguji proyek. Kemudian, amati perilaku Basis Kode.
- Siswa perlu memilih tombol 'Stop' di Toolbar VEXcode GO untuk menghentikan proyek setelah menyelesaikan tantangan.
Jika siswa selesai lebih awal, mintalah mereka mengubah lokasi area pemilahan. Minta mereka memindahkannya satu kotak lebih dekat ke Pangkalan Mars.
- Jarak perkiraan untuk area penyortiran ini adalah 250 milimeter (mm) (~10 inci (in)). Bisakah mereka membuat kode pada robot mereka untuk mengumpulkan dan mengirimkan Disk ke area penyortiran yang sama?
- MemfasilitasiMemfasilitasi percakapan dengan siswa saat mereka membangun dan menguji proyek mereka dengan pertanyaan-pertanyaan seperti:
- Bagaimana Basis Kode perlu dipindahkan untuk mengumpulkan Disk? Bisakah Anda menunjukkannya dengan tangan Anda?
- Apa yang harus Anda ubah agar Basis Kode Anda mengumpulkan Disk dari lokasi baru?
- Parameter apa yang harus Anda ubah agar Basis Kode menaruh Disk di area penyortiran baru?
Persiapkan siswa untuk uji coba dan kesalahan yang merupakan bagian intrinsik dari eksperimen yang akan mereka lakukan dengan tantangan ini. Anda mungkin ingin menggunakan grafik siklus pemecahan masalah dari halaman Latar Belakang sebagai bantuan visual untuk menetapkan struktur bagi proses pemecahan masalah dengan siswa Anda. Lihat Latar Belakang untuk informasi lebih lanjutuntuk strategi membantu siswa memecahkan masalah proyek mereka dan menemukan solusi mereka sendiri.
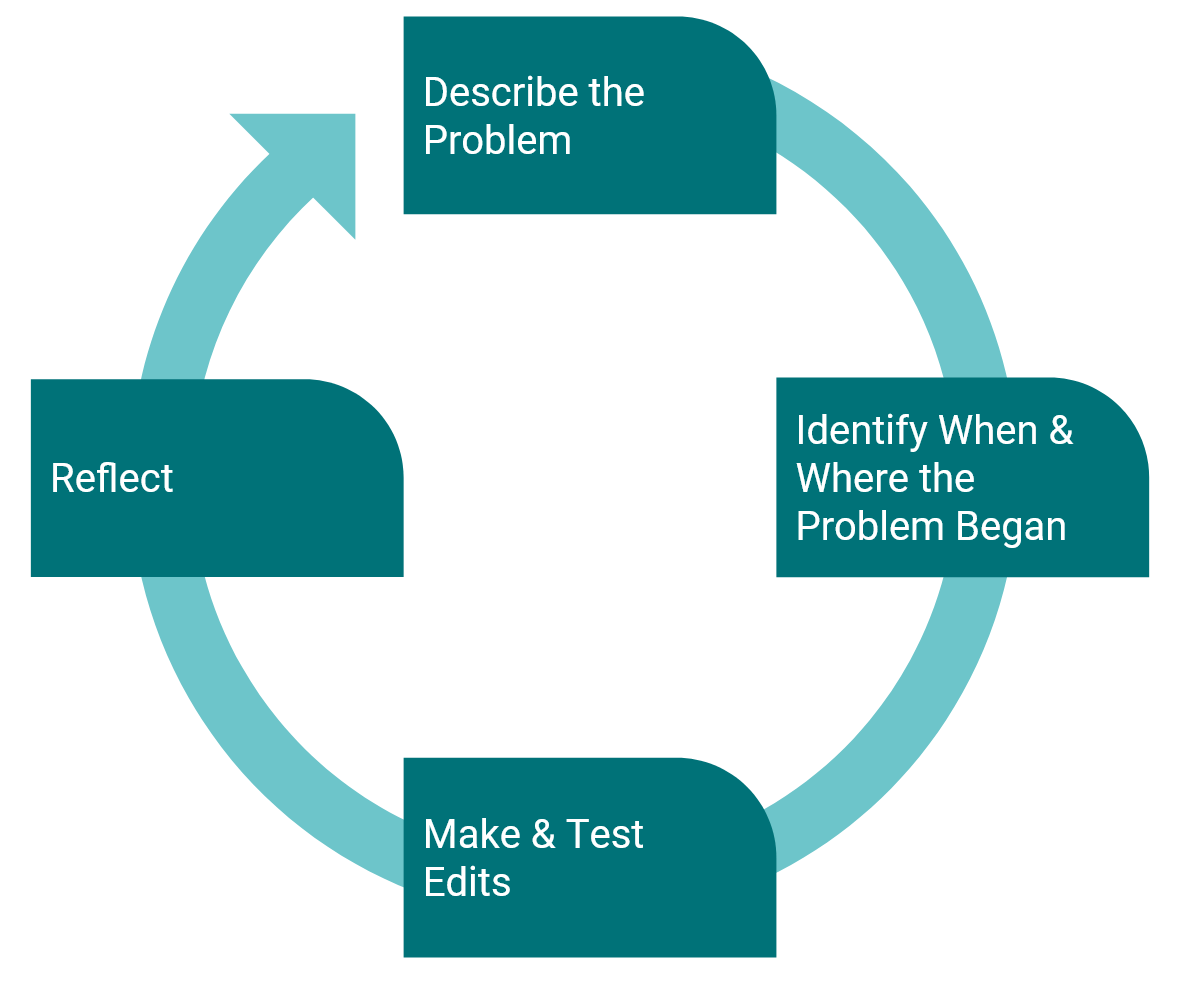
Siklus Pemecahan Masalah Siswa Ada banyak kemungkinan solusi untuk tantangan ini. Berikut ini adalah salah satu contohnya.

Mainkan Bagian 2 Solusi yang Mungkin Berfokuslah pada konsep, bukan pada ketepatan. Tujuan dari Lab ini adalah untuk berfokus pada konsep penggunaan Sensor Mata dengan Elektromagnet dalam suatu proyek. Jika siswa sedikit menggeser Basis Kode mereka, atau Cakram tidak berada pada tempat yang tepat saat mereka berkendara ke arahnya, beri tahu mereka bahwa tidak masalah untuk menggerakkan Cakram sedikit guna memastikannya tertangkap oleh Elektromagnet.
Jika siswa memerlukan dukungan tambahan untuk menghubungkan perilaku Basis Kode dengan perintah blok dalam proyek mereka, gunakan fitur Project Stepping untuk membantu siswa menelusuri proyek mereka satu blok pada satu waktu untuk melihat bagaimana setiap blok dieksekusi dalam proyek mereka. Untuk informasi lebih lanjut tentang cara menggunakan fitur Project Stepping, lihat tutorial Stepping Through Blocks di VEXcode GO.
Tutorial Melalui Blok di VEXcode GO - IngatkanIngatkan siswa untuk memeriksa tatanan (atau urutan) blok, dan parameter yang ditetapkan untuk setiap blok dalam proyek mereka sebelum mereka mengujinya di Lapangan.
- Apakah Basis Kode berbelok ke kanan, bukan ke kiri? Apa yang dapat Anda ubah agar robot berputar ke arah yang benar?
- Apakah Disk lebih jauh? Bagaimana Anda dapat mengubah parameter di blok [Drive for] untuk menemukan jarak yang tepat bagi Basis Kode untuk menempuh perjalanan?
- Apakah blok <Detects color> diatur ke Merah (warna Disk)?
Bicarakan dengan siswa mengenai pemecahan masalah masing-masing isu saat Anda berkeliling kelas. Ini akan menjadi proses berulang, jadi ingatkan siswa bahwa ilmuwan yang membuat kode untuk penjelajah Mars juga harus mencoba beberapa kali untuk membuat penjelajah itu bergerak sesuai keinginannya.
- TanyaMinta siswa untuk berpikir tentang bagaimana proyek mereka berubah dari Bagian Bermain 1 ke Bagian Bermain 2.
- Bagaimana proyek Anda berubah dari awal Lab hingga sekarang?
- Apa yang Anda ubah dalam proyek Anda agar berjalan lebih baik?
- Perubahan apa yang Anda buat sehingga kurang berhasil? Bagaimana Anda memperbaikinya?