
Su e giù
6 Lezioni
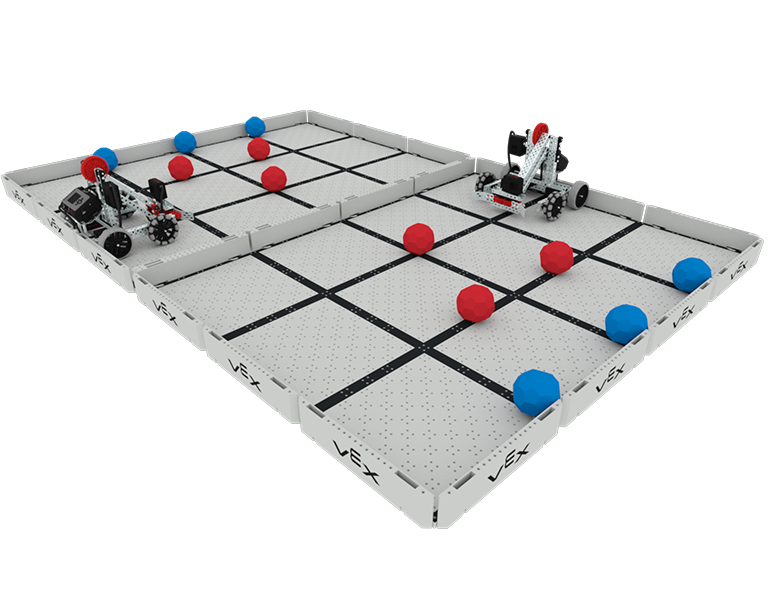
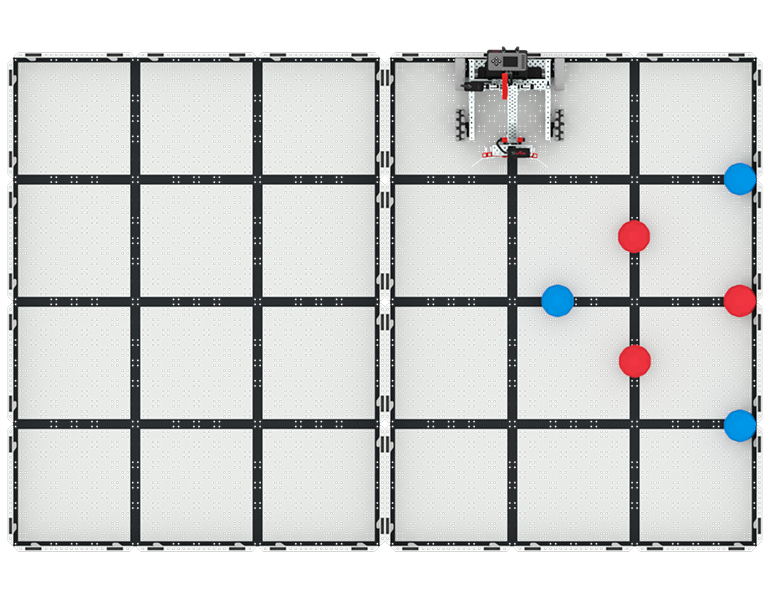
In questa unità esplorerai come progettare un Clawbot per raccogliere, raccogliere e spostare Buckyball da un lato all'altro del campo, nella competizione Up and Over!
Visita il Portale degli insegnanti per materiali di supporto e video per gli insegnanti sui contenuti e sulla facilitazione delle lezioni Up and Over.
Lezione 1: Introduzione
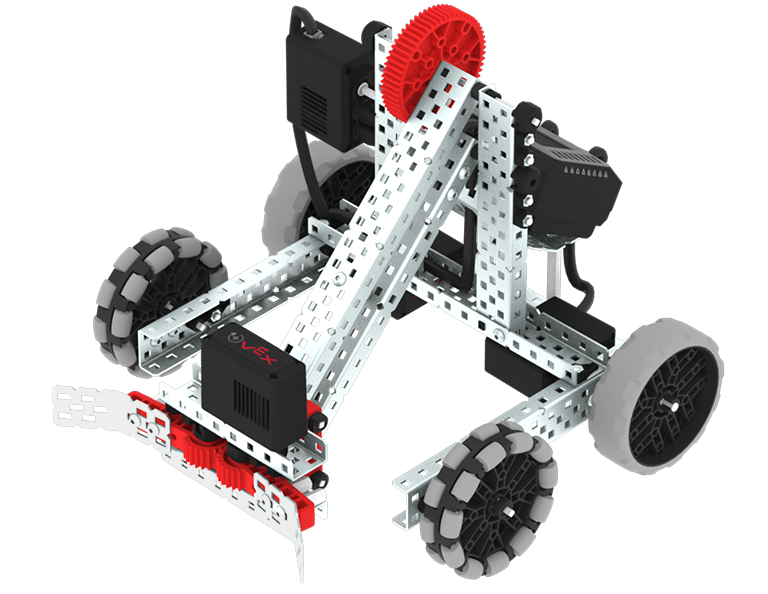
In questa lezione, verrai introdotto alla competizione Up and Over, imposterai la batteria e il controller, preparati a codificare e costruirai il Clawbot.
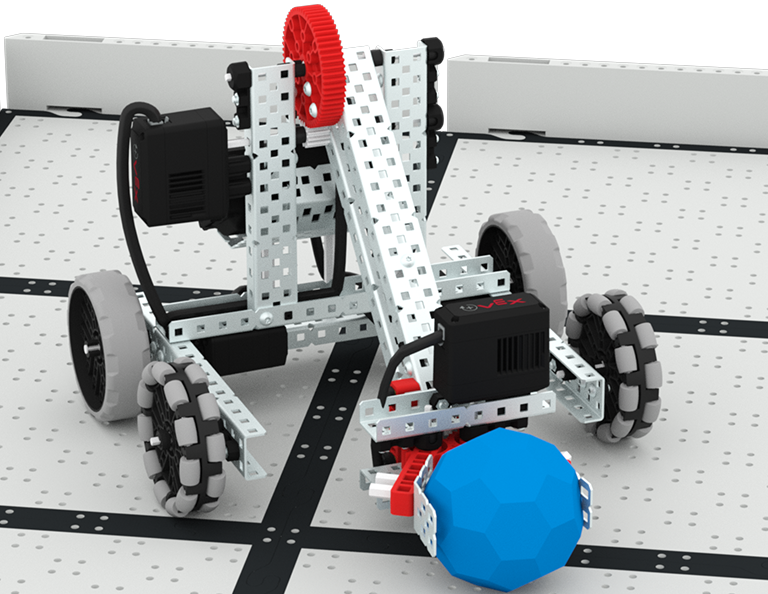
Lezione 2: Progettazione degli artigli
In questa lezione, imparerai cos'è un artiglio, come funziona un artiglio efficace e in che modo lo scouting può avvantaggiare i progetti e la strategia del tuo team. Quindi, applicherai ciò che hai imparato nella sfida Afferra e vai.
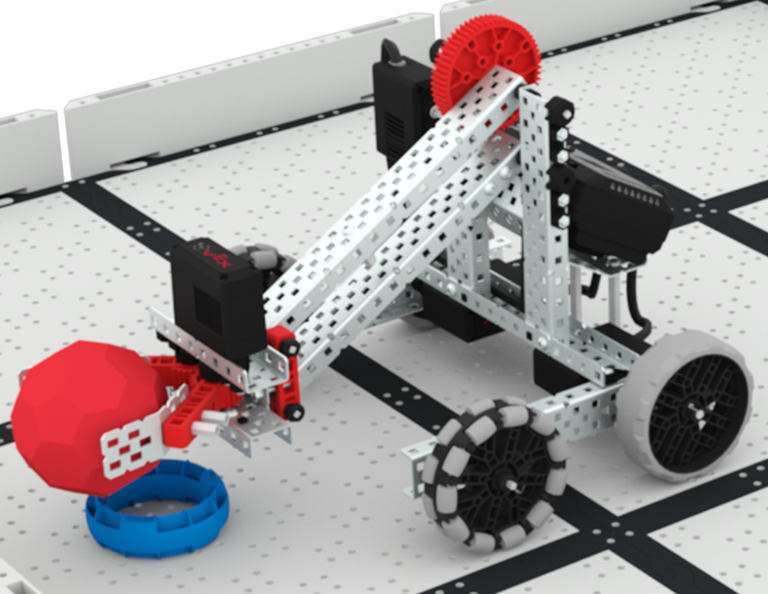
Lezione 3: Disegni del braccio
In questa lezione, imparerai a conoscere diversi elementi dei bracci robotici, incluso il loro funzionamento, e cosa rende efficace un design del braccio. Quindi, progetterai e costruirai un braccio per il tuo robot per impilare Buckyballs in anelli per la sfida Stacked Up.
Lezione 4: Gruppi Motori
In questa lezione, imparerai cosa sono i gruppi motori, come possono essere utili e come configurare i gruppi motori in VEXcode EXP per iterare sul tuo robot per completare la sfida Up and Over.
Lezione 5: Alza e supera la concorrenza
In questa lezione, applicherai quanto appreso dalle lezioni precedenti per competere nella competizione Up and Over!

Lezione 6: Conclusione
In questa lezione, rifletterai sull'unità e identificherai le connessioni tra ciò che hai fatto e una carriera STEM.