
2과: 전자석 사용하기
프로젝트 구축
-
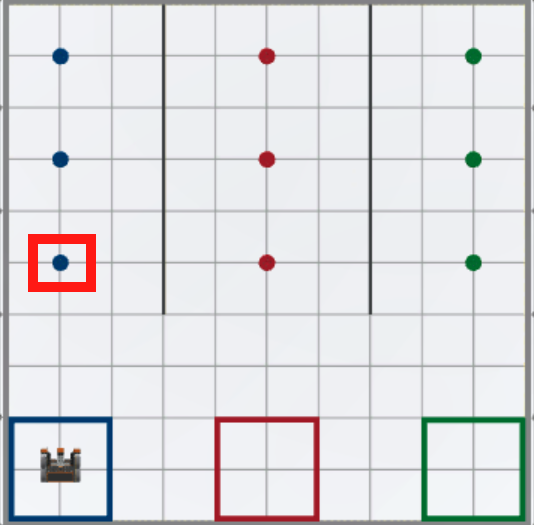
첫 번째 파란색 디스크는 Disk Mover Playground의 VR 로봇 시작점에서 750밀리미터(mm) 떨어져 있습니다. 첫 번째 주석 아래에 drive_for 명령을 끌어다 놓고 매개변수를 750밀리미터(mm) 앞으로 주행하도록 설정하면 프로젝트는 다음과 같습니다.
def main(): # 1. 첫 번째 파란색 디스크 drivetrain.drive_for(FORWARD, 750, MM) # 2로 이동합니다. 첫 번째 파란색 디스크 # 3을 집어 올리세요. 파란색 골 # 4까지 역방향으로 주행하세요. 파란색 디스크를 파란색 골에 넣으세요
귀하의 정보를 위해
VR 로봇의 시작점과 첫 번째 파란색 디스크 사이의 거리는 각 격자 사각형의 크기를 사용하여 추정되었습니다. Disk Mover Playground 의 각 격자 사각형은 200밀리미터(mm) x 200밀리미터(mm)입니다.
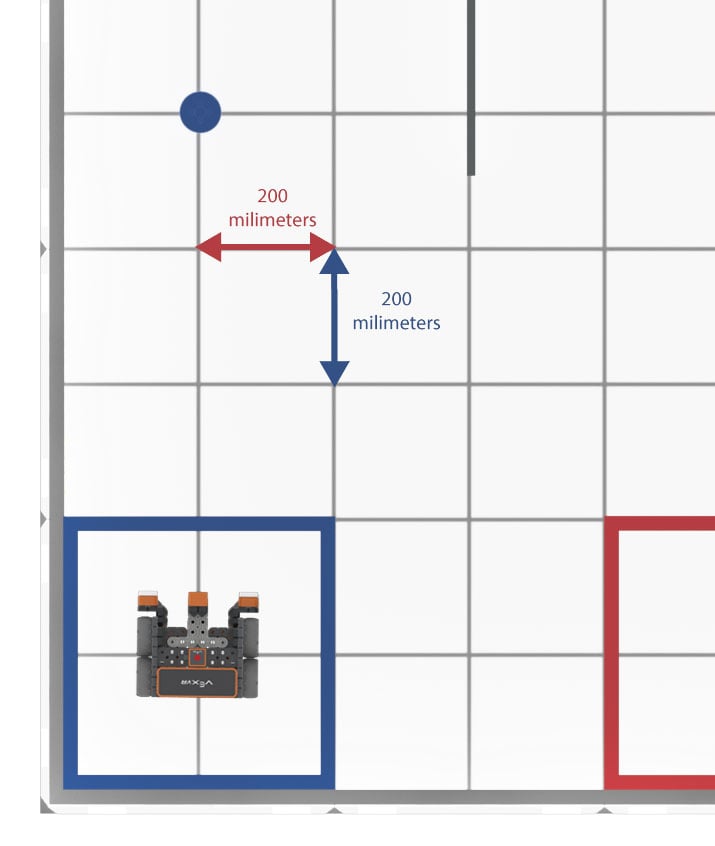
이 정보를 사용하면 첫 번째 파란색 디스크가 VR 로봇의 중심 로부터 800밀리미터(mm) 떨어져 있다고 추정할 수 있습니다. VR 로봇의 전면에 전자석이 있으므로 전자석과 첫 번째 파란색 디스크 사이의 거리는 800밀리미터(mm)보다 약간 짧을 수 있습니다.
-
VR 로봇이 첫 번째 파란색 디스크에 도달하면 VR 로봇은 활성화명령을 사용하여 전자석을 증폭해야 합니다. 두 번째 주석 아래로 energize 명령을 끌어다 놓거나 입력하면 프로젝트의 해당 섹션이 다음과 같이 표시됩니다.
#2. 첫 번째 파란색 디스크 magnet.energize(BOOST)를 집어 올리세요. -
다음으로, VR 로봇은 파란색 디스크가 있는 시작 지점으로 후진 주행합니다. 세 번째 주석 아래로 drive_for명령을 끌어다 놓거나 입력하면 프로젝트의 해당 섹션이 다음과 같이 표시됩니다. drive_for명령 매개변수를 750밀리미터(mm) 역전으로 설정합니다.
#3. 파란색 목표 drivetrain.drive_for(REVERSE, 750, MM)까지 역방향으로 주행합니다. -
VR 로봇이 파란색 골 안으로 들어가면 파란색 디스크를 꺼내야 합니다. 네 번째 주석 아래로 energize 명령을 끌어다 놓거나 입력하고 매개변수를 'DROP'으로 설정하면 프로젝트의 해당 섹션이 다음과 같이 표시됩니다.
#4. 파란색 디스크를 파란색 골 magnet.energize(DROP)에 넣으세요. -
놀이터 창이 아직 열려 있지 않으면 엽니다. Disk Mover Playground 이 열리고 프로젝트를 실행하세요.
-
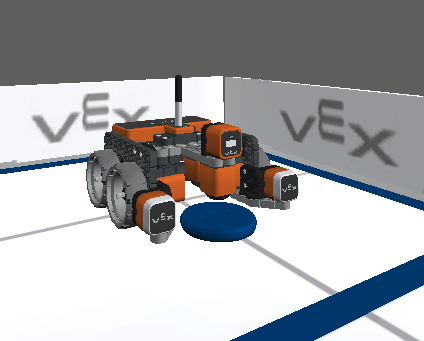
VR 로봇은 전자석에 전원을 공급하여 첫 번째 파란색 디스크를 집어 올린 다음, 역방향으로 이동하여 파란색 목표 지점으로 돌아와 파란색 디스크를 떨어뜨립니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.